
Fターム[5F031GA50]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 複数のアームを有するもの (389)
Fターム[5F031GA50]に分類される特許
141 - 160 / 389
基板搬送装置及び基板搬送方法

【課題】処理装置と基板収容部との間での基板の搬送の時間を短縮し、基板処理システムのスループットを向上させる。
【解決手段】処理装置22に対して基板Wの搬送行う基板搬送装置24は、処理装置22に搬入される複数の基板Wを鉛直方向に多段に収容する基板収容部50と、処理装置22から搬出される複数の基板Waを鉛直方向に多段に収容する基板収容部51と、基板収容部50から処理装置22に基板Wを搬送する基板保持部56と、処理装置22から基板収容部51に基板を搬送する基板保持部57を有している。基板収容部内50は基板Wと基板保持部56とを相対的に上下方向に移動させる昇降機構54を備え、基板収容部内51は基板Waと基板保持部57とを相対的に上下方向に移動させる昇降機構55を備えている。
(もっと読む)
基板搬送処理装置及び方法

【課題】少ない設置面積で、ウェーハを含む基板の搬送及び処理を行う装置及び方法を提供する。
【解決手段】線形搬送チャンバ1232は、線形トラックと、線形トラックに乗っているロボットアーム1243等を含み、基板を線形的に、処理チャンバ1201等の側部に沿って搬送する。又ロードロック1235を介し、処理チャンバ1201等に到達させ、搬送チャンバ1232に沿って基板を制御された雰囲気の中に供給する。よって相応な経費で、且つ改良されたスループットで効率的に製造を行うことができる。
(もっと読む)
基板処理装置
【課題】キャリアから処理ブロックへの基板の払い出しを速やかに行うこと。
【解決手段】ウエハ搬入部211にてウエハWが払い出されたキャリアCを退避用載置部22に移載すると共に、ウエハ搬入部211に未処理ウエハWを収納した新たなキャリアを移載し、この新たなキャリアから処理ブロックS2へウエハWを受け渡すにあたり、例えば100枚のウエハWを棚状に保持する基板保持部4を用意し、キャリアCからウエハ移載手段A1によりこの基板保持部4に5枚のウエハWを一括して移載し、次いで基板保持部4から受け渡し手段A2により処理ブロックS2に一枚ずつウエハWを受け渡す。基板保持部4には一度に5枚のウエハWが受け渡される一方、基板保持部4から取り出されるウエハWは一枚ずつであるので、処理ブロックS2へのウエハの払い出しが途切れることがなく、当該ウエハWの払い出しを速やかに行うことができる。
(もっと読む)
基板処理システム及び基板搬送方法
【課題】基板処理システムの構成を簡素化しつつ、処理チャンバ内の載置台に対して基板を所定位置に高精度かつ迅速に搬送する。
【解決手段】基板処理システムは、搬送装置32による基板の搬送や、処理装置23における基板の処理の制御を行う制御装置100を有している。制御装置100のレシピ設定部101では、処理レシピの設定を行う。記憶部102は、搬送アームの初期基準位置と、処理レシピと処理チャンバの側壁温度との第1の相関と、処理チャンバの側壁温度と基準位置の補正値との第2の相関とが記憶されている。補正部103では、レシピ設定部101で設定された処理レシピと、記憶部102に記憶された初期基準位置、第1の相関及び第2の相関に基づいて、搬送アームの基準位置が補正される。
(もっと読む)
基板処理システム
【課題】基板の搬送を効率よく行い、基板処理のスループットを向上させる。
【解決手段】塗布現像処理システム1には、複数の処理装置を鉛直方向に多段に積層し、かつ水平方向に直列に配置した第1のブロックG1と第2のブロックG2が配置されている。第1のブロックG1と第2のブロックG2との間には、搬送領域Rが設けられている。搬送領域Rには、ウェハを搬送するメイン搬送装置130、131が配置されている。メイン搬送装置130、131は、ウェハを保持する複数の搬送アームと、複数の搬送アームを鉛直方向に並べて支持する支持部と、各搬送アームを水平方向に独立して移動させ、かつ支持部を中心として各搬送アームを独立して回転させるアーム移動機構と、支持部を第1のブロックG1と第2のブロックG2に沿って鉛直方向及び水平方向に移動させる支持部移動機構と、を有している。
(もっと読む)
リソグラフィマシン及び基板処理構成体
複数の荷電粒子リソグラフィ装置を具備する構成体であって、各荷電粒子リソグラフィ装置は、真空チャンバ(400)を有する。この構成体は、複数のリソグラフィ装置にウェーハを運搬するための共通のロボット(305)と、夫々の真空チャンバ(400)の前面に配置された、各荷電粒子リソグラフィ装置のためのウェーハロードユニット(303)とをさらに具備する。複数のリソグラフィ装置は、これらリソグラフィ装置の前面が、各装置にウェーハを運搬するための共通のロボット(305)の通路を収容している通路(310)を面している状態で、列をなして配置され、各リソグラフィ装置の後面は、アクセス通路(306)に面し、各真空チャンバの後壁には、夫々のリソグラフィ装置へのアクセスのためのアクセスドアが設けられている。 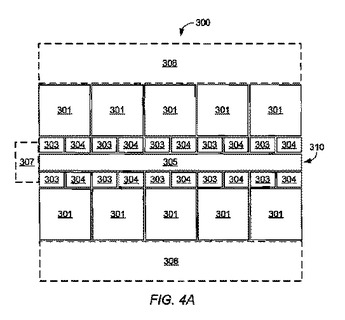 (もっと読む)
(もっと読む)
突き上げピンの位置決め方法およびその方法を用いた電子部品供給装置
【課題】予め突き上げピンに関するデータを持つことなく、突き上げピン先端部の中心位置を、自動的に計測することが可能な突き上げピンの位置決め方法およびそれを用いた電子部品供給装置を提供する。
【解決手段】エキスパンド台上のダイシングされたベアチップ等の部品Pを突き上げる突き上げピン45を、撮像装置25により上方より撮像し、撮像データに基づいて直交する2方向座標に対する輝度の累積値を表す累積ヒストグラムHX、HYを作成し、これら累積ヒストグラムの分布状態に基づいて各累積ヒストグラムの平均値をそれぞれ求め、これら平均値より突き上げピン先端部の中心位置を把握して位置決めする。
(もっと読む)
基板処理システム
【課題】基板の搬送を効率よく行い、基板処理のスループットを向上させる。
【解決手段】塗布現像処理システム1には、ウェハ搬送装置40の周囲に、第1〜第4のバッファ装置41〜44と第1〜第4の処理装置群G1〜G4が配置されている。第1〜第4のバッファ装置41〜44は、複数のウェハを鉛直方向に多段に保管するバッファ部を有している。第1〜第4のバッファ装置41〜44は、バッファ部搬送機構によってレール45上を第1〜第4の処理装置群G1〜G4に対向する位置に移動可能になっている。第1〜第4の処理装置群G1〜G4の各処理装置には、当該処理装置と第1〜第4のバッファ装置41〜44との間でウェハを搬送するウェハ搬送機構が設けられている。
(もっと読む)
産業用ロボット
【課題】基板が搭載される複数の搭載部間のピッチを変えるピッチ変更機構を備えている場合であっても、小型化することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボットを構成する基板搭載機構3は、上下方向に重なるように配置され基板が搭載される搭載部13〜17間のピッチを変えるピッチ変更機構26と、上下方向に移動可能な複数の可動ハンド18〜21とを備えている。ピッチ変更機構26は、Y方向を軸方向として配置される支点軸に回動可能に支持され可動ハンド18〜21が連結されるレバー部材52、53と、レバー部材52、53を回動させる駆動機構58とを備え、可動ハンド18〜21とレバー部材52、53との連結部となるハンド連結部は、レバー部材52、53に取り付けられY方向に突出する突出部材と、可動ハンド18〜21に取り付けられ突出部材が係合する係合溝が形成されるガイド部材とを備えている。
(もっと読む)
基板搬送装置及び基板処理システム
【課題】パターン倒れの発生を抑えると共に、簡素な構成の基板搬送装置等を提供する。
【解決手段】基板搬送装置の搬送トレイ50は基板を保持する底板511、521と、その周囲に設けられた側周壁512、522とから構成されると共に、底板511、521には基板の受け渡しを行う相手である昇降部材が通過するための開口部53が設けられている。さらに搬送トレイ50には、開口部53内の昇降部材を搬送トレイ50の外側に通り抜けさせる空間54が一時的に形成されると共に、基板の搬送時には搬送トレイ50内に液体が溜められ、基板の上面側が当該液体に接した状態で基板を搬送する。
(もっと読む)
相対ティーチング方法
【課題】 高い信頼性を持って迅速に相対ティーチングができるようにした搬送ロボットの相対ティーチング方法を提供する。
【解決手段】 基板Sをロボットハンド13にて支持した状態で同一平面内を旋回及び伸縮動作させ、前記旋回方向に沿って配置された複数の処理室L、P1乃至P3間で基板を搬送する搬送ロボット1に対し、その搬送動作を教示するとき、いずれか一の処理室に対して伸縮動作する際に基準となる座標データを教示し、この座標データに基づいて他の処理室に対して伸縮動作する際に基準となる座標データを教示する。一の処理室における座標データを教示する際にその伸縮軌道データを取得し、他の処理室における座標データを教示する際に、前記一の処理室及び他の処理室への搬送ロボットの伸縮ストロークが相互に異なると、前記伸縮軌道データから前記ロボットハンドの位置を補正する。
(もっと読む)
搬送装置
【課題】 駆動源となるモータの個数を少なくして装置コストの削減及び全体の軽量化を図ることが可能な搬送装置を提供する。
【解決手段】 被処理体Wを保持して搬送するための搬送装置において、ベースに回転自在に支持された回転基台24と、第1アーム部26A、28A、第2アーム部26B、28B及びピック部26C、28Cをこの順序で屈伸可能に連結してなる第1及び第2アーム機構26、28と、前記第1及び第2アーム機構の各第1アーム部にそれぞれ連結されて前記第1及び第2アーム機構を旋回させる駆動リンク機構30と、前記回転基台を回転駆動させる第1駆動源32と、前記駆動リンク機構を駆動する第2駆動源34と、を備える。
(もっと読む)
基板収納方法及び記憶媒体
【課題】既存の設備を利用してフープ内を清浄化し、ウエハの汚染を防止して歩留まり率を向上させることができる基板収納方法を提供する。
【解決手段】基板処理システム10は、ウエハWにRIE処理を施すプロセスシップ11と、ウエハWを収納するフープ14a〜14cと、プロセスシップ11とフープ14a〜14cとを連結するローダーモジュール13及びローダーモジュール13内に設けられた搬送アーム機構19と、ローダーモジュール13内にダウンフローを形成して異物を底部から排出するFFU34と、ローダーモジュール13とフープ14a〜14cとの連結部に設けられた開閉扉とを有する。基板処理システム10のフープ14bにウエハWを収納する際、搬送アーム機構19によってウエハWをフープ14b内に搬入し、その後、所定の遅延時間が経過するまで開閉扉を開放状態のまま保持する。
(もっと読む)
基板処理システム
【課題】1層に対する複数回パターニングを高効率で行うことが可能な基板処理システムを提供すること。
【解決手段】キャリアブロックS1と、そこから一枚ずつ搬入された基板に対し1回目の塗布処理を行う第1塗布処理部31、1回目の現像処理を行う第1現像処理部41、2回目の塗布処理を行う第2塗布処理部32、2回目の現像処理を行う第2現像処理部42を有する処理ブロックS2と、露光装置との間で基板を受け渡すインターフェイスブロックS3と、これらの間で基板を搬送する基板搬送機構とを具備し、一つの基板に対して少なくとも2回の露光を行う露光装置に対応可能であり、第2現像処理部42の上に第1塗布処理部31が積層されてなる第1積層体と、第1現像処理部41の上に第2塗布処理部32が積層されてなる第2積層体とが並置されている。
(もっと読む)
電子デバイス製造において基板を搬送するためのロボットシステム、装置、および方法
基板搬送システム、装置、および方法が説明される。これらのシステムは、目的地の近傍の位置までブームリンク装置を回転させ、次いで目的地にて基板を配置または取り出すようにロボットアセンブリを作動させることにより、目的地にて基板を効率的に配置するまたは取り出す。多数の他の態様が提示される。  (もっと読む)
(もっと読む)
基板処理装置
【課題】高スループット化と証フットプリント化の相反する条件の両立を実現することのできる基板処理装置を提供する。
【解決手段】搬送室12を中心としてロードロック室14aと少なくとも二つの処理室16aが配置されている基板処理装置であって、搬送室はロードロック室と処理室間で基板を搬送する基板搬送部を有し、基板搬送部は、第一のフィンガ及び第二のフィンガが設けられた第一のアームを有し、それぞれのフィンガの先端は水平方向であって同じ方向に延伸されるよう構成され、処理室は、第一の処理部36と第二の処理部38とを有し、第二の処理部は、搬送室から第一の処理部を挟んで遠方に配置される。
(もっと読む)
基板保持具および基板保持方法
【課題】基板を容易に離脱させることができる基板保持具および基板保持方法を提供する。
【解決手段】本発明の基板保持具は、W基板を真空吸引により保持する。この基板保持具は、基板Wの吸着面を有する基板保持ステージ1と、真空源および流体供給源に選択的に連結される流体通路14,23とを備える。基板保持具の吸着面は、凸部6a,6b,6cによって囲まれた複数の閉区画12を有し、流体通路14,23は、これらの閉区画12にそれぞれ独立して連通する複数の連通路14,23bを有している。
(もっと読む)
基板処理装置
【課題】 基板の搬送効率を高め、基板処理工程の生産性を向上させる。
【解決手段】 複数枚の基板を保持するロードロック室と、ロードロック室内に連通可能な第1搬送室と、第1搬送室内に連通可能で基板を処理する第1処理室と、第1搬送室内に連通可能な中継室と、中継室内に連通可能な第2搬送室と、第2搬送室内に連通可能で基板を処理する第2処理室と、ロードロック室、第1処理室、中継室間での基板の搬送を行う第1搬送ロボットと、中継室、第2処理室間での基板の搬送を行う第2搬送ロボットと、第1搬送ロボットによる第1処理室内外への基板の搬送時間帯が、第2搬送ロボットによる第2処理室内外への基板の搬送時間帯と少しでも重なり合うように、第1搬送ロボット及び第2搬送ロボットを制御する制御部と、を備える。
(もっと読む)
ロボット装置及びその制御方法
【課題】処理チャンバ内に収納されている基板の一部のみを搬出する場合に残りの基板が処理チャンバの内壁に干渉することを防止し、処理チャンバを十分に小型化できるようにする。
【解決手段】自由端122が基軸16を通過することなく基準線17に接近するようにアーム機構10の前段用モータ12A及び後段用モータ12Bを駆動しつつ、搬出される基板4Aを保持した保持端212Aが基準線17上を移動するようにハンド用モータ22Aを駆動する。これと同時に、搬出されない基板4Bを保持した保持端212Bが保持端212Aから離間するようにハンド用モータ22Bを駆動する。
(もっと読む)
移送ロボットおよび移送ロボットの制御方法
【課題】本発明は、比較的小さな設置面積に配置でき、上下への昇降範囲が広くできるとともに、安全にワークを移送することが可能な移送ロボットを提供する。
【解決手段】搬送物を載置するハンド部14と、前記ハンド部14を一方向に移動させるアーム機構30と、アーム機構30を上下に移動する昇降機構20を備えた移送ロボットにおいて、前記昇降機構20が、ベース部材2に備えられた少なくとも2組のリンク機構から構成され、リンク機構の関節軸の方向がハンド部14の移動方向と同じとなるよう配置し、ハンド部14が2組のリンク機構の間で昇降するよう動作させる。また、ハンド部14のローリング方向、横ずれ動作などを行なう。
(もっと読む)
141 - 160 / 389
[ Back to top ]