
Fターム[5F031GA50]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 複数のアームを有するもの (389)
Fターム[5F031GA50]に分類される特許
161 - 180 / 389
試料位置検知端部エフェクタおよびその使用方法
【課題】ウエハの引っ掻き傷や粒子による汚損を最少にして半導体ウエハを確実に移送し得る試料把持用端部エフェクタを提供すること。
【解決手段】光源、及び受光部に作動するように連結された本体を有する端部エフェクタを設け、前記光源、及び受光部は離間するそれぞれの光源光路開口、及び受光路開口を有し、これ等開口の間に光透過路に沿って光ビームが伝搬し、これ等光ビームが既知のビーム形状であるように前記光源光路開口、及び受光路開口の寸法を定め、前記試料と本体との空間を狭くするため、これ等試料と本体との間の相対運動を与え、前記相対運動を与えることに組み合わせて、前記光透過路に交差するように前記試料を位置決めする。
(もっと読む)
搬送装置及び真空処理装置

【課題】簡素な構成で旋回半径を小さくすることができ、しかも搬送速度が大きい搬送装置を提供する。
【解決手段】本発明の搬送装置1は、一方の端部A、Bに第1及び第2の駆動軸11、12が同心状に配設された第1及び第2のアーム21、22を有する。第1及び第2のアーム21、22の他方の端部C、Dには、第3及び第4のアーム23、24の一方の端部E、Fが、支軸23a、24aを中心としてそれぞれ回転自在に取り付けられている。第3及び第4のアーム23、24は、その他方の端部G、Hが、連結軸30aを中心として同心的に回転できるように構成されている。第2のアーム22の駆動軸12の回転動力を第3のアーム23に伝達するための第1の動力伝達機構4と、第1のアーム21の一方の端部Cにおける回転動力を連結軸30aに伝達するための第2の動力伝達機構5が設けられている。
(もっと読む)
基板処理装置及び基板処理方法
【課題】高スループット化と省フットプリント化の相反する条件の両立を実現し、ウエハのレジスト剥離均一性を確保することができる。
【解決手段】基板を処理する処理室と、前記処理室に内包された基板載置台41と、前記基板載置台41上で基板を一時待機させることが可能な基板搬送部材40と、前記基板載置台41を囲むように設けられた排気孔49aと、前記排気孔49aと前記基板載置台41の上端部を結んだ線と、前記基板載置台41との間に、前記基板搬送部材40を退避させる退避空間42と、を有する。
(もっと読む)
基板処理装置
【課題】フットプリントを増加させることなくスループットを向上させることができる基板処理装置を提供する。
【解決手段】基板処理装置100は、塗布処理部121および搬送部122を有する。塗布処理部121には、塗布処理室21〜24が階層的に設けられる。搬送部122には、上段搬送室125および下段搬送室126が階層的に設けられる。各塗布処理室21〜24には塗布処理ユニット129が設けられる。上段搬送室125には、搬送機構127が設けられ、下段搬送室126には搬送機構128が設けられる。また、各塗布処理室21〜24には給気ユニット41が設けられる。また、上段搬送室125および下段搬送室126には、それぞれ給気ユニット43が設けられる。給気ユニット41,43からは温湿度調整された空気が供給される。
(もっと読む)
搬送機構の制御方法、基板処理装置、及び記憶媒体
【課題】搬送機構を長時間停止させておいた場合でも、初回駆動時にエラーを起こし難い搬送機構の制御方法を提供すること。
【解決手段】ロードポートと、ロードポートに接続された搬入出室と、搬入出室に接続されたロードロック室と、ロードロック室に接続された搬送室と、搬送室に接続された複数の処理室と、搬送室に設けられ、被処理基板を搬送する搬送機構と、を備えた基板処理装置の搬送機構の制御方法であって、被処理基板がロードポートに到着した後、かつ、被処理基板が搬送室に移送される前に、搬送機構を微少駆動させる。
(もっと読む)
ウェーハ搬送ロボット及びウェーハ搬送装置
【課題】省スペース化と高スループット化を図ったウェーハ搬送ロボットを提供する。
【解決手段】昇降可能な支持台200と、支持台上に一端が軸支され水平方向に旋回可能な第1アーム部201と、その他端部上に一端が軸支され水平方向に旋回可能な第2アーム部202と、第1アーム内に設けられ、第1及び第2アームを旋回させアームの最大移動範囲内の任意の位置に停止させるアーム駆動機構221,222とで構成される水平多関節ロボット220と、第2アーム部の先端上に軸支され、水平方向に旋回可能な互いに対称的に配置された2つの機械式リンクアーム241,242と、その先端にそれぞれ設けられウェーハを保持するエンドエフェクタ208,209とを有する水平多関節機械式ダブルリンクアーム240とを備え、機械式リンクアームを旋回させる旋回機構が前記第2アームの内部に設けられ、エンドエフェクタは、互いに間隔をおいて上下に配置した。
(もっと読む)
ダブルアーム型ロボット
【課題】簡易な構成と省スペースを実現できるダブルアーム型ロボットを提供する。
【解決手段】搬送物2,3が載置されるハンド部23,33、各々が関節部で回動可能に連結された複数のアーム21,22,31,32を有し、ハンド部23,33がアーム22,32の一端に関節部で回動可能に連結される、第1及び第2の多関節アーム11,12と、第1及び第2の多関節アーム11,12の一端が、基端の関節部によって各々回動可能に連結されるアーム支持部13と、アーム支持部13の一端を鉛直方向に移動可能に保持し、基台15に固定される基柱14と、第1及び第2の多関節アーム11,12を基端の関節部で回動させる第1及び第2のアーム駆動部と、第1及び第2の多関節アーム11,12における基端の関節部以外の関節部での回動を行わせる第1及び第2の関節回動部とを備える。
(もっと読む)
基板処理装置及び基板搬送方法
【課題】真空チャンバ間のゲートバルブを開放するときの衝撃波を抑えると共に真空チャンバ内にガスが供給されるときの粘性力によるパーティクルの剥がれを抑え、これにより基板に対するパーティクル汚染を抑えること。
【解決手段】例えば一方の真空チャンバが基板に対して真空処理を行うための基板処理室、他方が基板搬送装置を備えた搬送室であるとするとゲートバルブを開く前に両方のチャンバ内の圧力が66.5Paよりも低くかつ圧力検出値の高い方が低い方の2倍よりも小さいことを条件にゲート弁を開くようにする。この場合、基板処理室内に圧力調整用のパージガスを供給する前に圧力調整用のパージガスの流量よりも大きな流量でパーティクル剥離用のパージガスを供給することが好ましい。また両方のチャンバ内のいずれもが9.98Paよりも低いことを条件にゲートを開くことも有効である。
(もっと読む)
産業用ロボット
【課題】大きな搬送対象物や高価な搬送対象物の搬送に適した産業用ロボットを提供すること。
【解決手段】産業用ロボットは、搬送対象物が搭載されるハンドと、ハンドが連結されるアームと、アームを支持する支持部材と、支持部材を上下動させる上下駆動機構と、上下駆動機構を制御する制御部80とを備えている。上下駆動機構は、上下駆動機構を停止させるための2個のブレーキ機構24を備え、制御部80は、2個のブレーキ機構24を制御するブレーキ制御部84を備えている。ブレーキ制御部84は、2個のブレーキ機構24を段階的に作動させる。
(もっと読む)
基板処理装置
【課題】基板表面の高湿酸素雰囲気の曝露時間を短縮化することができる基板処理装置を提供すること。
【解決手段】インデクサ部内には、N2ガスチャンバ12が複数個配置されている。N2ガスチャンバ12は、天板13に固定された対向部材16と、対向部材16に対して基板Wを昇降させるための複数本のリフトピン17とを備えている。対向部材16の基板対向面20には、1つの中央部吐出口21および複数個の周縁部吐出口22が設けられている。各吐出口21,22から吐出されるN2ガスが、基板Wの表面と基板対向面20との間に供給される。
【効果】基板Wの表面と基板対向面20との間がN2ガスで充満される。インデクサ部内の高湿酸素雰囲気から基板Wの表面を遮断することができる。
(もっと読む)
基板搬送装置およびこれを備えた基板処理装置
【課題】基板の搬送時間を短縮することができる基板搬送装置およびこれを備えた基板処理装置を提供すること。
【解決手段】メインロボットMRは、複数の基板保持ハンド14a,14bを備えた第2上アーム13と、複数の基板保持ハンド16a,16bを備えた第2下アーム15と、第2上アーム13を移動させる上進退駆動機構29と、第2下アーム15を移動させる下進退駆動機構30とを含む。メインロボットMRは、各基板保持ハンド14a,14b,16a,16bを用いて基板保持位置に対して基板を搬入および搬出することができ、複数の基板保持位置の間で基板を搬送することができる。
(もっと読む)
基板処理装置及びその基板移送方法
【課題】基板のローディング/アンローディングの効率を向上させる基板処理装置及びその基板処理装置で基板を移送する方法を提供すること。
【解決手段】基板処理装置は、各移送アームの速度を調節する制御部710を具備し、同時駆動される各移送アームが各目標地点に同時に到達するように制御する。基板移送方法については、基板処理装置は、受納部材に対して基板を引出及び積載する移送部材200と、移送部材200を制御する制御部710とを含む。移送部材200は、基板が各々積載される多数の移送アームと、各移送アームを水平方向に移動させるアーム駆動部とを具備する。制御部710は、移送部材200の移動速度と位置を制御し、各移送アームの移動中の予想速度プロファイルを比較して、各移送アームの移動速度を制御する。
(もっと読む)
ウェハのアライメント装置、それを備えた搬送装置、半導体製造装置
【課題】ウェハのノッチを検出し、角度合わせを行うアライメント装置において、装置の小型化とアライメント時間の短縮を目的とする。
【解決手段】ノッチ或いはオリフラ15に対して予め定められた位置に刻印されたID11が表面或いは裏面に刻印された半導体ウェハ3を載置するウェハ載置部7と、ウェハ載置部7を回転させる旋回機構と、ウェハ載置部7の回転位置を検出する回転位置検出手段と、ID11を読み取るIDリーダー10と、を備え、IDリーダー10がID11を読み取ったときのウェハ載置部7の回転位置を回転位置検出手段から取得し、予め記憶しているID11とノッチ或いはオリフラ15との位置関係によってノッチ或いはオリフラ15を所望の位置へ回転させるようにした。
(もっと読む)
ワークピース搬送システムおよびワークピース搬送方法
【課題】ウェーハを搬送するのにかかる時間を短縮する。
【解決手段】
デュアルロボット搬送システムが、処理モジュールに対してワークピースを搬入および搬出する搬送モジュールと、上記搬送モジュールと上記受け渡しシステムとの間の物理的インタフェースと、実質的に第1の可動域を有する第1の上部アームおよび第1の底部アームを有し、実質的に上記搬送モジュール内に配置されて、上記処理モジュールと上記搬送モジュール内に配置されるバッファステーションとに対してワークピースを搬送および搬出する第1のロボットと、上記第1の可動域の一部と重なる実質的に第2の可動域を有する第2の上部アームおよび第2の底部アームを有し、実質的に上記搬送モジュール内に配置されて、上記処理モジュールと、上記バッファステーションと、上記物理的インタフェースとに対してワークピースを搬送および搬出する第2のロボットとを具備する。
(もっと読む)
真空処理装置
【課題】処理済試料と未処理試料を効率良く交換することにより、スループットを向上させる真空処理装置を提供する。
【解決手段】処理対象の試料が上面に載せられる試料台を備え内部でプラズマが形成される処理室を有する真空容器と伸縮するアーム上に試料を保持して搬送するロボットが配置され真空容器と連結されて減圧された内部を試料が搬送される真空搬送容器とを備えた真空処理装置において、ロボットのアームの先端側で伸縮の方向に延在して上下の異なる高さに配置され試料を保持する位置が伸縮の方向について異なる複数の保持部と、処理室内側で複数の保持部の各々の試料の保持位置を試料台の上面の上方に移動させるようにアームの動作を調節する駆動手段とを備える。
(もっと読む)
半導体基板洗浄システム
【課題】縦向きの半導体基板を処理するモジュール式半導体基板洗浄システムを提供する。
【解決手段】このシステム11は、メガソニックタンク式洗浄機15および後続のスクラバ17,19を含むことができる複数の洗浄モジュールを特徴としている。入力モジュール13は、横向きの基板を受け取って縦向きに回転させ、出力モジュール23は、縦向きの基板を受け取って横向きに回転させる。各モジュール(入力、洗浄および出力)は、基板支持体25を有し、隣接するモジュールの基板支持体が等間隔で離間するように配置されている。これらのモジュールは、複数の基板ハンドラ33を有するオーバヘッド搬送機構31によって連結されている。これらの基板ハンドラは、その下方にあるモジュールの基板支持体と同じ距離(X)で離間されている。
(もっと読む)
搬送装置及び処理装置
【課題】被搬送体の大型化と、搬送精度及び搬送速度の維持向上とを両立させることが可能な搬送装置を提供すること。
【解決手段】スライド部を有し、上下に少なくとも2段に配設された下部スライドベース51a、及び上部スライドベース51bと、下部スライドベース51aのスライド部54aをスライドし、下部スライドベース51aに対して進出退避して被搬送体を搬送する下部ピック52aと、下部ピック52aと上部スライドベース51bとの間に配設され、上部スライドベース51bのスライド部54bをスライドし、上部スライドベース51bに対して進出退避して被搬送体とは別の被搬送体を搬送する上部ピック52bと、下部スライドベース51aと上部スライドベース51bとを互いに連結する複数の矩形フレーム53a乃至53cと、を具備する。
(もっと読む)
半導体素子製造装置
【課題】真空ポンプを使用することなく、メンテナンス作業の作業効率を高めてコストダウンを図ると共に省スペース化を実現し、これにより優れた経済性・スペース性を獲得できる半導体素子製造装置を提供する。
【解決手段】吸着保持ユニット6には、圧縮エアを流すことで負圧つまり真空を発生させて半導体素子Sを吸着するエジェクタ8が組み込まれており、エジェクタ8の正圧側にはエジェクタ8のオンオフを行う電磁弁9が設置されている。また、エジェクタ8の排気側には集塵機11が接続されている。
(もっと読む)
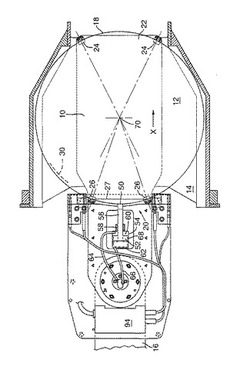
半導体ウエハの検査装置および検査方法
少なくとも1つのウエハ支持体が設けられているウエハ移送アーム(30)と、ウエハの対向する縁部をつかむように構成される2つのリモートリム(18、19)を有するウエハグリッパ(15)であって、前記グリッパ(15)はおおよそ水平方向位置とおおよそ垂直方向位置との間でウエハを回転させるために軸上で回転するように取付けられたグリッパと、前記ウエハの一方側および他方側に、おおよそ垂直方向位置で前記ウエハを通る平面に対して対称的に配置された少なくとも2つの検査システムとを備える半導体ウエハ検査装置(1)。 (もっと読む)
ワーク搬送用ロボット
【課題】アーム機構部の旋回及び伸縮を可能とする各モータの配線ケーブルに折れ曲がりやねじれなどの変形が生じるのを防止する。
【解決手段】第1及び第2のアームとハンドとを有するアーム機構部100と、該アーム機構部を昇降させるための昇降機構部200と、アーム機構部を伸縮動作させるための伸縮機構部300と、アーム機構部を旋回動作させるための旋回機構部400と、固定フレーム500とを有するワーク搬送用ロボットであって、昇降機構部200は、固定フレーム500に固定された昇降用モータ220を有し、伸縮機構部200は、固定フレーム500に固定された伸縮用モータ310と、該伸縮用モータの駆動力をアーム機構部100に伝達する第1スプライン軸350とを有し、旋回機構部400は、固定フレーム500に固定された旋回用モータ410と、該旋回用モータの駆動力をアーム機構部100に伝達する第2スプライン軸430とを有する。
(もっと読む)
161 - 180 / 389
[ Back to top ]