
Fターム[5F031GA50]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 複数のアームを有するもの (389)
Fターム[5F031GA50]に分類される特許
201 - 220 / 389
無人搬送車、該無人搬送車を備えた搬送移載システム、及び搬送移載方法
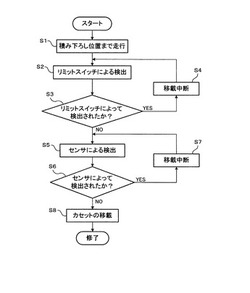
【課題】移載装置による被搬送物の移載先である載置ポートにおける障害物の有無をより確実に検出する。
【解決手段】無人搬送車がカセットを移載する製造装置の前で停止すると(S1)、該製造装置のINポートに設けられたリミットスイッチが該INポートにおけるカセットの有無を検出する(S2)。リミットスイッチによってカセットが検出されなかった場合には(S3:NO)、無人搬送車に設けられたセンサが該INポートにおけるカセットの有無を検出する(S5)。そして、センサによってカセットが検出されなかった場合には(S6:NO)、移載装置によって、無人搬送車に積載されたカセットのINポートへの移載が行われる(S8)。
(もっと読む)
搬送装置

【課題】2つのハンドを備えた搬送装置において、ハンドの動作にともなう振動の発生やアームのダレなどの不都合を低減する。
【解決手段】搬送装置A1は、旋回軸Os周りに旋回可能な旋回ベース2と、旋回ベース2に対し、旋回軸Osを挟んで旋回軸Osから等距離にある回動軸O1,O2周りに回動可能に支持されたアーム4A,4Bと、アーム4A,4Bのそれぞれに固定状に支持され、ワークWを保持しうるハンド6A,6Bと、旋回ベース2を回動させる旋回駆動手段と、アーム4A,4Bを回動させるアーム駆動手段と、を備え、各ハンド6A,6Bは、これに保持させるワークWの中心が位置するべき基準点S1,S2をそれぞれ有し、上記旋回駆動手段と上記アーム駆動手段が連動して、ハンド6A,6Bのいずれか一方を、基準点S1または基準点S2が旋回軸Osを通る水平直線上の移動行程GLを移動するように所定位置間を移動させる。
(もっと読む)
基板処理装置
【課題】スループットが向上された基板処理装置を提供する。
【解決手段】基板処理装置100は、インデクサIDおよび処理部PRを有する。インデクサIDと処理部PRとの間に隔壁Dが形成されている。インデクサIDと処理部PRとの間で基板Wの受け渡しを行う受け渡し部3は、処理部PR内に設けられている。インデクサIDでは、インデクサロボットIRがキャリア1と受け渡し部3との間でハンドにより基板Wを搬送する。インデクサロボットIRは、第1の軸Saに沿った移動動作および回転動作を行う。ハンドは前進動作および後退動作を行う。受け渡し部3の一端部(第1の受け渡し位置)351は隔壁Dの中央部からインデクサID内に突出している。第1の受け渡し位置351の両側方には、通路スペースSPが形成されている。通路スペースSPは、インデクサロボットIRのハンドが前進した状態で通過できるように形成されている。
(もっと読む)
基板処理装置
【課題】スループットが向上された基板処理装置を提供する。
【解決手段】インデクサロボットIRは、第1および第2の基板保持機構110,120、第1および第2の昇降機構130,140、回転機構150および移動機構160を備える。第1および第2の基板保持機構110,120は、それぞれアームおよびハンドを有し、それぞれ第1および第2の昇降機構130,140上に設けられている。第1および第2の昇降機構130,140は、それぞれ独立して第1および第2の基板保持機構110,120を昇降動作させる。第1および第2の昇降機構130,140は、回転機構150上に設けられている。回転機構150は、移動機構160上に設けられている。
(もっと読む)
基板搬送装置
【課題】同期の調整、複雑な制御が不要となり、低コストで基板搬送装置を実現できる。
【解決手段】処理対象基板を載置する基板載置台と、当該基板載置台を本体フレームに対してスライド可能に支持するスライド機構と、前記基板載置台に載置された前記処理対象基板を支持して昇降させる昇降機構と、前記スライド機構によってスライド可能に支持された前記基板載置台を設定位置に正確に移動させる移動機構とを備えた。前記昇降機構は、前記移動機構で前記基板載置台を一方にスライドさせると前記処理対象基板を上昇させ、前記基板載置台を他方にスライドさせると前記処理対象基板を降下させる連動機構を備えた。
(もっと読む)
真空処理装置用真空チャンバー
【課題】 真空チャンバーを設置した後においても、ユーザーの要望等によって真空チャンバーの形状や大きさを簡易に変更することができるようにする。
【解決手段】 真空チャンバー1が、長方形状に形成されたチャンバー本体2と、チャンバー本体2の両側面にボルト留めで取り外し自在に密着接合される3角形状の側面枠3a、3bと、チャンバー本体2と側面枠3a、3bのそれぞれの開口している上面に接合される上板6、9a、9bと、チャンバー本体2と側面枠3a、3bのそれぞれの開口している底面に接合される底板7と、に分割自在に構成されているので、ユーザーの要望等によって真空チャンバーの形状や大きさを簡易に変更することができる。
(もっと読む)
ウエハ搬送ロボット
【課題】ウエハの供給能力の高いウエハ搬送ロボットを提供する。
【解決手段】ウエハ搬送ロボット1は、移動可能な本体5と、本体5に設けられ、末端にウエハ20を保持できるハンド19を備えるロボットアーム7と、本体5に設けられ、ウエハ20を保持可能な吸着パッド14を備えるアライナ6とを有し、アライナ6は、吸着パッド14を本体5に対して垂直方向および水平方向に移動可能、且つ、水平軸周りに回転可能であり、吸着パッド14の昇降によってハンド19との間でウエハ20を受け渡し可能である。
(もっと読む)
被処理体の支持機構及びロードロック室
【課題】状況に応じて択一的使用が可能な被処理体の支持機構を提供する。
【解決手段】被処理体Wを移載するための被処理体の支持機構において、複数の昇降アクチュエータ46、48の昇降ロッド50、52に個別に連結されて昇降可能になされた複数の昇降ベース38、40と、各昇降ベースより起立されてその先端が被処理体を支持する複数のリフトピン38A〜38C、40A〜40Cと、昇降アクチュエータを独立して制御する昇降制御部68とを備え、各昇降ベースのリフトピンは水平座標における実質的に同一領域にある被処理体を支持可能であり、昇降制御部は各昇降ベースのリフトピンが択一的に被処理体を支持するように昇降アクチュエータを制御する。これにより、リフトピンをグループ毎に状況に応じて択一的使用が可能とする。
(もっと読む)
ウェーハ搬送装置
【課題】本発明の目的は、ウェーハ搬送ロボットの搬送精度を維持してミニエンのウェーハ搬送システムが運転停止に至る不具合の発生を回避し得るウェーハ搬送装置を提供する。
【解決手段】本発明のウェーハ搬送装置は、内部にウェーハの搬送室を形成するミニエン筐体と、ウェーハを把持してカセット部と半導体製造装置との間を搬送する搬送室内を移動可能なウェーハ搬送ロボットと、前記ウェーハ搬送ロボットのウェーハハンドリング機構に設置されてウェーハを把持して移動させるハンド部と、このハンド部に設けられて検出対象物を検出する検出器と、前記ミニエン筐体内に設置されて前記ウェーハ搬送ロボットが移動する搬送室内の複数の方向の基準を定める基準スリットと、前記ハンド部の検出器によって検出した検出対象物の基準スリットの位置に基いて前記ウェーハ搬送ロボットの移動方向を制御する制御コントローラを備えて構成した。
(もっと読む)
基板処理装置および基板搬送装置
【課題】搬送室の大型化を回避することができ、しかも処理チャンバの基板搬送のための開口を広くすることなく、さらに機構部に過度の負担をかけることのない基板搬送装置およびそのような基板搬送装置を搭載した基板処理装置を提供すること。
【解決手段】基板搬送装置は、ガラス基板を支持した状態で処理チャンバ10内へ搬送するピック52と、ピック52を駆動する主駆動機構60とを有し、ピック52は、基部56bと、基部56bからフォーク状に延びる複数の第1支持部材56aと、第1支持部材56aに進出退避可能に接続された第2支持部材57aとを有し、これら第1支持部材56aと第2支持部材57aとで伸縮可能な支持部材を構成し、支持部材を伸ばした状態で基板が搬送される。
(もっと読む)
真空状態に減圧された処理室内部のアームを駆動する搬送装置
【課題】 コンパクトで低振動・低騒音であり、特に半導体ウエハやLCD(液品表示)ガラス基盤などを処理するのに適する搬送装置を得る。
【解決手段】 アーム61A、61Bを取着し同軸状に配置した出力軸21A、21Bに連結された外接軸20A、20Bと、外接軸の外周に接触配置された複数の中間軸30A、30Bと、中間軸の外周に内接する内接円筒40A、40Bとからなり、中間軸を回転自在に支持するキャリア10を固定し、各組の中間軸30A、30Bに前段減速機50A、50Bを介して駆動モータ70A、70Bを接続した。
(もっと読む)
プローブ装置
【課題】プローブカードを用いてウエハ上のICチップの電気的特性を調べるプローブ装置において、ウェハの搬送効率を高めて高スループット化された装置の提供。
【解決手段】複数のウェハWが収納されたキャリアC1、C2を載置する第1と第2のロードポート11、12と、下面にプローブが形成されたプローブカードを備えた複数のプローブ装置本体と、鉛直軸回りに回転自在及び昇降自在に構成され、前記第1と第2のロードポート11、12と前記プローブ装置本体との間において前記ウェハWの受け渡しを行うためのウェハ搬送機構3と、をプローブ装置に設置して、このウェハ搬送機構3に互いに独立して進退自在な少なくとも3枚以上の基板保持部材を設ける。そしてウェハ搬送機構3によりキャリアC1、C2から少なくとも2枚のウェハWを受け取り、これら少なくとも2枚のウェハWを複数のプローブ装置本体内に順次搬入する。
(もっと読む)
多関節ロボット
【課題】本発明は上下移動軸からの発塵による基板の汚染を防止するとともに、生産性を向上させた液晶用のガラス基板や半導体ウェハ等の薄板状のワークをストッカに出し入れする多関節ロボットを提供する。
【解決手段】搬送物を載置するハンド部(8)と、前記ハンド部(8)と連結され、少なくとも2つ以上の回転関節(3)、(4)、(5)を備え、前記ハンド部(8)を1方向に移動するように伸縮し、軸方向に対向するように配置された多関節アーム(1)と、前記多関節アーム(1)と上下に移動する移動機構(11)とを連結する支持部材(10)と、前記移動機構(11)に備えられた旋回機能を有する台座(13)とからなる多関節ロボット(1)において、前記移動機構(11)は、前記ハンド部(8)の移動方向と同方向にコラム(12)が配置され、前記移動機構(11)に配置された支持部材(10)は、前記ハンド部(8)の移動方向に直交する方向に突出し、前記多関節アーム(2)と連結されたものである。
(もっと読む)
処理装置、処理方法、被処理体の認識方法および記憶媒体
【課題】処理ユニットに搬入される被処理体の位置ずれ情報を少ない数の検出器により高精度で検出して、位置ずれが小さい状態で被処理体を処理することができる処理装置および処理方法を提供すること。
【解決手段】CCD検出器30により、処理ユニット1の入口近傍の待機位置W1で待機している半導体ウエハWの外周の円弧形状を撮像する。撮像された半導体ウエハWの外周の円弧形状から、演算部40により、その円弧形状の複数箇所の位置データが検出され、半導体ウエハWの仮想円が求められ、その中心座標が算出されて、待機位置W1における半導体ウエハWの「位置ずれ情報」が算出される。そして、この「位置ずれ情報」に基づいてコントローラ50により搬送装置12を制御して処理ユニット1での半導体ウエハWの位置補正を行う。
(もっと読む)
異物・欠陥検査・観察システム
【課題】フットプリントの大幅な増大を抑え、エッジ部分を含む高速・高分解能で、検査条件の確認を簡便に行える異物・欠陥検査・観察システムを提供する。
【解決手段】荷電粒子光学系による観察機能と、荷電粒子光学系および試料周辺を真空にするための排気機能と、稼動範囲が小さいrθステージと、を設け、従来異物・欠陥検査装置に搭載されていた光学式の観察機能では判別できない観察対象物表面およびエッジ部の微細な異物・欠陥を、他の観察装置を介することなく、検出された欠陥の致命/非致命を判断するための高分解能観察機能を設けた。
(もっと読む)
基板搬送装置
【課題】厚みが薄く、かつ撓みが生じにくい搬送フォーク、特に、焼成処理温度のような高温下にさらされた場合であっても撓みが生じにくい搬送フォークを備える基板搬送装置を提供する。
【解決手段】基板焼成炉に対する基板の搬出入を行う基板搬送装置の備える搬送フォーク24を、ハニカム構造体である本体部材Bと、本体部材Bの上面に接合され、本体部材Bよりも熱膨張率の小さい材質によって形成された天板部材Hとによって構成する。搬送フォーク24が高温下にさらされると、本体部材Bと天板部材Hとの間の熱膨張率の差に起因して、相対的に熱膨張率が小さな部材である天板部材Hの側に曲がろうとする上向きの力が生じる。搬送フォーク24の撓みの原因となる下向きの力(すなわち、支持する基板Wの重みや自重に起因する下向きの力)が、この上向きの力で相殺されることによって、搬送フォーク24の撓みが抑制される。
(もっと読む)
ウェハのアライメント装置、それを備えた搬送装置、半導体製造装置
【課題】アライメント処理を短時間で行うことができ、比較的構成が簡易で、装置の大幅なスループットの向上が図れるウェハのアライメント装置を提供すること。
【解決手段】把持機構30が、第1層36a、第2層36b、及び第3層36cの上下3層のグリップ部からなり、上下3層のグリップ部36がそれぞれ独立にウェハ1を把持可能に構成され、ノッチ検出センサ113が、第1層或いは第2層で把持されたウェハの外周部分を検出する第1のセンサ112と、第2層或いは第3層で把持されたウェハの外周部分を検出する第1のセンサ111と、から構成される。
(もっと読む)
半導体装置の製造方法及び半導体製造装置
【課題】ウェハソータにおいて、SEMI規格に合わせた装置構成で設置場所の省スペース化を実現する。
【解決手段】ウェハソータ1において、キャリアポート20,30のうちの少なくとも1つは、キャリアステージ31,131,231が垂直方向に積層された状態で複数配置されていると共に、複数のキャリアステージ31,131,231が一体で垂直方向に上下動し、キャリアステージ31,131,231が水平方向に引き出し可能とされている。このため、SEMI規格に合わせた装置構成でウェハソータ1の設置場所を省スペース化することができる。
(もっと読む)
高速スワップロボット付コンパクト基板搬送システム
基板処理システムであって、基板の収納および搬送用に少なくとも1つの基板容器を保持する構成のロードポートモジュールと、基板処理チャンバと、チャンバ内の隔離された雰囲気を保持して基板処理チャンバとロードポートモジュールに結合する構成の隔離可能な移送チャンバと、駆動部がこの移送チャンバに固定されこの移送チャンバ内に少なくとも部分的に取り付けられる基板搬送機とを含み、この基板搬送機が、少なくとも1つの基板を支える構成の1つのSCARAアームを有し、SCARAアームは、その基板の基板容器と処理チャンバとの間で少なくとも1つの基板をワンタッチのみで搬送するように構成され、第1アームリンクと、第2アームリンクと、少なくとも1つのエンドエフェクタとを備えており、これらはそれぞれ連続的に枢動可能に結合され、第1および第2アームリンクは異なる長さを有するシステム。  (もっと読む)
(もっと読む)
基板搬送装置
直線的に配置された第一固定子と、第一アームに結合している第一回転子と、を有する第一シャフトレス回転モータと、直線的に配置された第二固定子および第二アームに結合している第二回転子を有し、第二アームが第一アームに連結している第二シャフトレス回転モータと、第一および第二アームのうちの少なくとも1つに結合している第一基板支持体と、を備える基板搬送装置であって、第一および第二固定子は、第一および第二アームならびに第一基板支持体が両固定子の内側にあるように、また、第一および第二シャフトレス回転モータと第一および第二アームのそれぞれの1つとの連結におけるモータ出力が、第一および第二アームの周辺に形成される合力であるように、構成されている  (もっと読む)
(もっと読む)
201 - 220 / 389
[ Back to top ]