
Fターム[5F031GA50]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 複数のアームを有するもの (389)
Fターム[5F031GA50]に分類される特許
81 - 100 / 389
基板貼合せ方法
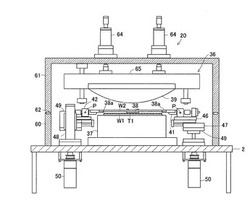
【課題】半導体ウエハなどのワークと補強用の支持基板との貼り合せ精度の向上を図ることのできる基板貼り合わせ方法を提供する。
【解決手段】複数個の係止爪38で周縁部分を係止保持された支持基板W2をウエハW1の両面接着シート貼付け面に近接するように対向配備し、この支持基板W2の非貼合せ面の略中央から略半球形状の弾性体で構成された押圧部材39を押圧し、この押圧部材39を弾性変形させて支持基板面に扁平接触させながら支持基板W2をウエハW1に貼り合せる。
(もっと読む)
基板の処理装置

【課題】小ロット処理に対応した塗布現像処理装置を提供する。
【解決手段】塗布現像処理装置のカセット搬入出部10のカセット載置台12の上方に、2段の空カセット載置台20、21と、カセット移送機構22が設けられる。空カセット載置台20、21は、外部カセット搬送装置Aが上下に通過できるように構成されている。各空カセット載置台20、21は、カセットが載置される4台のカセット移動装置30を有し、載置したカセットを隣のカセット移動装置に移送できる。外部カセット搬送装置Aによりカセット載置台12に搬入され、ウェハWが処理ステーションに搬送された空のカセットは、カセット移送機構22により空カセット載置台に一時的に貯め置かれる。空いたカセット載置台12には次のカセットが搬入される。空カセット載置台の空のカセットは、ウェハ処理が終了する前にカセット載置台12に戻される。
(もっと読む)
サポートプレートの洗浄方法
【課題】サポートプレートの洗浄後に廃溶液を発生させること無く、且つ安価に処理することが可能なサポートプレートの洗浄方法を実現する。
【解決手段】サポートプレート7にドライアイス粒子4を接触させて、サポートプレート7に付着した有機物および金属を除去する二酸化炭素ブラスト処理工程を含み、サポートプレート7は、基板が剥離された後のサポートプレートである。
(もっと読む)
基板搬送機構および偏光フィルムの貼合装置における基板支持部を備えた反転機構
【課題】基板を反転させるとともに、搬送方向に対する上記基板の配置を変更して、タクトタイムを短くすること。
【解決手段】本発明の基板搬送機構または偏光フィルムの貼合装置における基板支持部を備えた反転機構は、長方形の基板5を長辺または短辺が搬送方向に沿った状態にて搬送する第1基板搬送機構61と、上記基板を短辺または長辺が搬送方向に沿った状態にて搬送する第2基板搬送機構62とを備える基板搬送機構において、上記第1基板搬送機構61にて搬送された上記基板5を支持する基板支持部66a、66bに連結した基板反転部67の反転動作により、上記基板支持部に支持された上記基板5を反転させるとともに、配置を変更して第2基板搬送機構62に配置するように構成されている反転機構65を備えている。
(もっと読む)
被処理体処理装置
【課題】 各種処理における処理時間を短縮しても生産性が頭打ちになる事情を抑制できる被処理体処理装置を提供すること。
【解決手段】 複数の被処理体を搬送する第1の搬送装置34が配置された搬送室31と、搬送室31の周囲に設けられ、複数の被処理体に処理を施す処理室32と、搬送室31と処理室32との間に設けられ、第1の搬送装置34が搬送してきた複数の被処理体を搬送装置34から移載して処理室32に搬送する第2の搬送装置37が配置された移載室33と、を備える。
(もっと読む)
処理システム及び搬送機構の冷却方法
【課題】搬送機構自体の過度の昇温を抑制することが可能な処理システムを提供する。
【解決手段】被処理体Wに処理を施す処理システムにおいて、被処理体に対して処理を施す複数の処理装置24A〜24Dと、複数の処理装置がその周辺に連結された共通搬送容器26と、共通搬送容器内に設けられて、屈伸及び旋回可能になされると共に先端に被処理体を保持するピック部38A、38Bを有して被処理体を複数の処理装置に対して搬送する搬送機構34と、共通搬送容器の側壁に冷却用容器を連結させて設けることにより形成された冷却用領域76と、冷却用領域に設けられてピック部を冷却するためのピック冷却機構78とを備える。これにより、搬送機構自体の過度の昇温を抑制する。
(もっと読む)
被処理体の支持機構、支持方法およびそれを備えた搬送システム
【課題】支持機構の設置空間を極小化することで処理装置全体の小形化に貢献し、また、搬送アームとの間の移載時に起こる被処理体の位置ずれを格段に低減することができる被処理体の支持機構及び支持方法を提供する。
【解決手段】被処理体Wと接触してこれを支持するリフトピン38と、リフトピン38を昇降させるモータ100と、モータ100を駆動する駆動制御装置200と、からなるユニットをN組(Nは少なくとも3以上の整数)備え、駆動制御装置200が、N組のそれぞれのリフトピン38の先端から、搬送アーム14に載置された被処理体Wまでの距離あるいは搬送アーム14の被処理体Wの載置面までの距離、がすべて同じになるようにN組のモータ100のそれぞれを独立して駆動してから被処理体Wを授受する。
(もっと読む)
基板搬送装置及び基板処理装置
【課題】互いに温度の異なる基板を搬送する場合において、搬送アーム上における位置ずれを抑えながら高い効率で基板を搬送すること。
【解決手段】第1の搬送アーム11の突起15の材質として第2の搬送アーム12の突起15よりも摩擦係数の大きい樹脂またはゴムを用いると共に、第2の搬送アーム12の突起15の材質として第1の搬送アーム11の突起15よりも耐熱温度の高いセラミックスを用いる。そして、第1の搬送アーム11の突起15の耐熱温度以下の温度のウエハWを搬送する場合には第1の搬送アーム11を用い、また第1の搬送アーム11の突起15の耐熱温度よりも高い温度のウエハWを搬送する場合には、第2の搬送アーム12により当該第1の搬送アーム11の搬送速度よりも遅い速度で搬送する
(もっと読む)
搬送装置
【課題】安定した昇降位置精度を確保することができるとともに、時間あたりの搬送作業効率の高い基板搬送作業を実現することができる搬送装置を提供する。
【解決手段】搬送装置1においては、第1のアーム10の駆動軸310A及び旋回軸310Bと同軸上に第1のアーム10を昇降させる昇降軸52が配置されている。昇降軸52がとく同軸310A及び旋回軸310Bと同軸上に配置されているため、昇降軸52が搬送装置1の重心またはその近傍に位置する。さらに、同一平面内における第1のアーム10及び第2のアーム20の占有範囲を90度よりも小さい角度範囲に収めることで、時間あたりの搬送作業効率の高い基板搬送作業を実現することができる。
(もっと読む)
ウエハ保持装置
【課題】ウエハ保持装置の交換作業を行うことなく、異なる直径を有する半導体ウエハを保持することが可能なウエハ保持装置を提供する。
【解決手段】このウエハ保持装置100は、異なる直径を有するウエハ120(130)を載置可能であるとともに、異なる直径を有するウエハ120(130)に共通に用いられる前方ウエハ把持部22を有する前方ウエハ載置部21と、前方ウエハ把持部22とともにウエハ120(130)を把持可能なローラ31a、31bおよび突起部31cを有し、ウエハ120(130)の直径の大きさに応じて前方ウエハ把持部22に近づく前方向および前方ウエハ把持部22から離間する後ろ方向にスライド可能なスライドアーム30とを備える。
(もっと読む)
基板処理装置、積層半導体装置製造方法及び積層半導体装置
【課題】ロボット搬送アームの撓みを計測し、事故を未然に防止する。
【解決手段】基板を処理する複数の処理室に連結された連結室と、連結室に配され、基板を複数の処理室の間で搬送する搬送アームと、搬送アームを目標位置に移動した場合の搬送アームの実際の位置を計測する計測部と、目標位置と計測部により計測された位置との差を算出する算出部とを備える基板処理装置が提供される。複数の処理室の少なくとも一つは、減圧環境で複数の基板を押圧して貼り合わせる加圧室であり、複数の処理室の少なくとも他の一つは、搬送アームに受け渡す基板を仮置きするロードロック室である請求項1に記載の基板処理装置。
(もっと読む)
関節装置及び基板搬送装置
【課題】俊敏な動作と高精度な位置制御を可能とする関節装置及び基板搬送装置を提供すること
【解決手段】本発明の関節装置は、第1の平行リンクと、第2の平行リンクと、伝達機構とを具備する。第1の平行リンクは、第1の支点を中心とする第1の回転が可能な第1のレバーと、第2の支点を中心とする第2の回転が可能な第2のレバーとを有する。第2の平行リンクは、第1の支点を中心とする第3の回転が可能な第3のレバーと、第2の支点を中心とする第4の回転が可能な第4のレバーとを有する。伝達機構は、第1の支点を中心として第1の回転と共に回転する第1のギアと、第2の支点を中心として第2の回転と共に回転する第2のギアと、第1のギア及び第2のギアに噛合して回転する第3のギアと、前記第3のギアの回転と第3の回転及び第4の回転とを同期させる連結部とを有し、第1の平行リンクの駆動と第2の平行リンクの駆動とを連動させる。
(もっと読む)
基板処理装置、ストッカー装置および基板収納容器の搬送方法
【課題】大型化を抑制しつつ基板処理のスループットを十分に向上させることができる基板処理装置、ストッカー装置および基板収納容器の搬送方法を提供する。
【解決手段】基板処理装置においては、ストッカー装置、インデクサブロック、処理ブロックおよびインターフェースブロックがこの順で並ぶように配置される。ストッカー装置は、複数の基板を収納するキャリアFを載置可能な複数のオープナーを有する。ストッカー装置にキャリアFが搬入される。ストッカー装置においては、搬送装置200により複数のオープナーの間でキャリアFが搬送される。搬送装置200は、キャリアFを保持可能に構成され、水平方向および上下方向に移動可能な第1および第2のハンド230,240を有する。第2のハンド240は第1のハンド230の下方に設けられる。
(もっと読む)
基板処理装置、積層半導体装置製造方法及び積層半導体装置
【課題】ロボット搬送アームの位置ずれを補正する。
【解決手段】基板を処理する複数の処理室に連結された連結室と、連結室に配され、基板を複数の処理室の間で搬送する搬送アームと、搬送アームに配され、搬送アームの移動量を計測する移動量計測部と、基板の方向における搬送アームの連結室内での位置を計測する位置計測部と、移動量計測部により計測された移動量に対応する位置と位置計測部により計測された位置との差に基づいて、基板を搬送する場合の搬送アームの位置を補正する補正部とを備える基板処理装置が提供される。
(もっと読む)
搬送装置
【課題】 ウエハを載置する位置やゲートの向きに係わらずウエハを略真直ぐ入れることができる搬送装置を提供する。
【解決手段】 搬送装置1は、旋回ベース13と、2つのハンド機構13,14と、2つのハンド用駆動機構30,40とを有する。2つのハンド機構13,14は、旋回ベース13に回動軸線L2,L3を中心に回動可能に夫々設けられ、ハンド駆動機構30,40により個別に回動動可能に構成されている。ハンド機構13,14は、アーム20と、ハンド21と、連動機構26とを有している。アーム21は、回動軸線L2,L3を中心に回動可能に前記旋回リンクに夫々設けられ、ハンド20は、ハンド用軸線L4,L5を中心に回動可能に前記アーム21に夫々設けられている。連動機構26は、アーム20に対する前記ハンド21の減速比が1.55でアーム20と前記ハンド21とを連動させるように構成されている。
(もっと読む)
真空処理装置および半導体デバイスの製造方法
【課題】受け渡しチャンバ室の機構を大型化、複雑化させることなく、処理前後のウェハの退避場所を確保できる、真空処理装置を提供することを目的とする。
【解決手段】2つの真空チャンバ間に設けられた基板受け渡しチャンバを有する真空処理装置において、前記基板受け渡しチャンバが、基板を支持するリフトピンと、基板を仮置きするバッファーアームと、基板を載置する基板ステージとを具備し、前記リフトピンが、斜め方向に昇降することを特徴とする。
(もっと読む)
真空処理装置、および半導体デバイスの製造方法。
【課題】受け渡しチャンバ室の機構を大型化、複雑化させることなく、処理前後のウェハの退避場所を確保できる真空処理装置を提供する。また、ウェハの退避場所にウェハが置かれた状態で、受け渡しチャンバ室に新たに搬送されたウェハの位置を検出可能な真空処理装置を提供する。
【解決手段】2つの真空チャンバ間に設けられ、ノッチあるいはオリフラが設けられた基板の受け渡しを行う受け渡しチャンバ2を具備する真空処理装置において、前記受け渡しチャンバ2が、基板を支持するリフトピン111〜113と、基板を仮置き位置で保持するバッファーアーム13と、基板を載置する基板ステージ12と、前記基板のノッチあるいはオリフラを検出する第一のセンサ14とを具備する。
(もっと読む)
基板処理装置
【課題】1装置当たりの処理能力を増加する基板搬送装置。
【解決手段】半導体加工部品処理装置は第1チャンバと、搬送ビークルと、他のチャンバとを有している。第1チャンバは外部環境から隔離されることが可能である。搬送ビークルは第1チャンバ内に位置しており、第1チャンバから移動自在に支持されており、第1チャンバに対して直線状運動する。搬送ビークルはベースと、該ベースに運動自在に取り付けられて、該ベースに対して多アクセス運動が可能な統合した半導体加工部品移送アームとを有している。他のチャンバは第1チャンバに第1チャンバの閉鎖自在な開口部を介して連通自在に接続されている。開口部は搬送ビークルが第1チャンバと他のチャンバとの間で開口部を介して通行可能な大きさを有している。
(もっと読む)
搬送装置及びこの搬送装置を備えた被処理体処理装置
【課題】 処理装置における処理時間を短縮しても生産性が頭打ちになる事情を抑制することが可能であり、かつ構造も簡易である搬送装置を提供すること。
【解決手段】 垂直方向に伸び回転可能な第1のシャフト部35aと、第1のシャフト部35aに取り付けられ、先端に被処理体Wを保持する第1のピック40aを備えた水平方向に伸縮可能な第1のアーム39aとを備えた第1の搬送機構33aと、垂直方向に伸び回転可能な第2のシャフト部35bと、第2のシャフト部35bに取り付けられ、先端に被処理体Wを保持する第2のピック40bを備えた水平方向に伸縮可能な第2のアーム39bとを備えた第2の搬送機構33bと、を具備し、第1の搬送機構33a及び第2搬送機構33bを、第1のシャフト部35aの回転中心42aと第2のシャフト部35bの回転中心42bとが一致されるようにして、垂直方向に互いに離間して配置する。
(もっと読む)
半導体被処理基板の真空処理システム及び半導体被処理基板の真空処理方法
【課題】真空搬送室に備えられた真空処理室の配置を最適化し、設置面積あたりの被処理物の生産能力の高い装置を提供する。
【解決手段】カセット内に収納されたウエハが搬送される大気搬送室と、大気搬送室から搬送されるウエハを収納するロック室105と、ロック室後方に連結される第一の真空搬送室104とを備えており、第一の真空搬送室には、複数の搬送中間室111、115〜117が連結されており、さらにその後段には真空搬送室110、112〜114が連結されており、ウエハは、ロック室を介して第一の真空搬送室に搬送され、後段の各真空処理室内において処理するために、第一の真空搬送室に連結された複数の搬送中間室の何れかを介して後段の夫々の複数の真空搬送室に搬送され、第一の真空搬送室以外の後段の複数の真空搬送室に搬送された夫々のウエハが、複数の真空搬送室に夫々連結された各真空処理室に搬送されて処理される。
(もっと読む)
81 - 100 / 389
[ Back to top ]