
Fターム[5F031GA50]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 複数のアームを有するもの (389)
Fターム[5F031GA50]に分類される特許
21 - 40 / 389
搬送ロボット
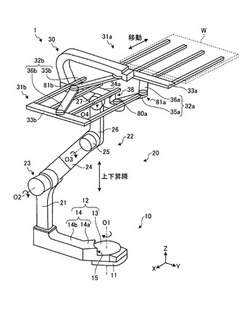
【課題】構成を簡素化し、かつ、十分な昇降範囲を確保できる搬送ロボットを提供すること。
【解決手段】搬送ロボット1の旋回台12は、基台11に鉛直軸O1回りに旋回可能に取り付けられた基部13から延伸部14が水平に一方向にのみ延伸する。延伸部14の先端部からは支柱21が鉛直方向に立設される。第1昇降用アーム24は、支柱21の先端部で水平軸回りに回転可能に支持され、第2昇降用アーム26は、第1昇降用アーム24の先端部で水平軸回りに回転可能に支持される。水平アームユニット30は、第2昇降用アーム26の先端部で水平軸回りに回転可能に支持される。水平アームユニット30は、被搬送対象物を載置するハンド部33aを支柱21に対して鉛直軸O1側で水平軸と平行な方向に移動させるアーム部32aを有し、水平アームユニット30のアーム部32aの一部が延伸部14の上面よりも低い位置で動作して被搬送対象物を搬送可能である。
(もっと読む)
半導体装置の製造方法

【課題】パワー系半導体のメタル電極製造工程に於いて、薄膜化されたウエハの熱処理等の反りによる搬送ミスやウエハクラックを防止する製造方法を提供する。
【解決手段】半導体ウエハ1の裏面研削後に、ウエハを予熱した状態でスパッタリング成膜によりメタル膜を成膜するに際して、ウエハを円環状のサセプタに収容して処理するものであって、その円環の放射状垂直断面は、半導体ウエハの表面の周辺部を重力に対して保持する水平に近い第1の上側表面41と、第1の上側表面に続いて、その外側にあって、半導体ウエハの側面を横ずれに対して保持する垂直に近い第2の上側表面42を有するものである。
(もっと読む)
基板搬送方法および基板搬送機
【課題】基板搬送機自体の位置決め調整の許容範囲を広げ、基板へのダメージ、パーティクルの発生、基板の搬送不良を防止することができる基板搬送方法および基板搬送機を提供する。
【解決手段】本基板搬送方法は、基板Wの周縁部を一対の支持アーム171で支持し、支持アーム171と基板Wの周端部との間に所定のクリアランスが形成された状態で、支持アーム171および基板Wを移動機構162,165により移動させる。支持アーム171で支持している基板Wを反転させることも可能である。
(もっと読む)
基板処理装置
【課題】輸送時に基板搬送容器格納棚の分解を必要とせず、又再組立てを必要とせず、輸送コストを低減できると共に作業性の向上を図る基板処理装置を提供する。
【解決手段】複数枚の基板21が収納される基板搬送容器9と、該基板搬送容器を搬送する基板搬送容器搬送装置15と、該基板搬送容器搬送装置15により搬送された複数の基板搬送容器9が格納される基板搬送容器格納棚11とを具備し、該基板搬送容器格納棚11を高さ方向に伸縮可能とした。
(もっと読む)
物体交換システム、露光装置、フラットパネルディスプレイの製造方法、デバイス製造方法、及び物体交換方法
【課題】基板ステージ上の基板の交換を迅速に行う。
【解決手段】基板ステージ20aは、基板ホルダ30aから加圧気体を噴出して基板P1を浮上させ、基板搬出装置93は、基板ホルダ30aの上面(基板載置面)をガイド面として基板P1を水平面に沿って移動させることにより基板ホルダ30aから搬出する。次に露光予定の別の基板P2は、基板P1の搬出動作が行われる際、基板ホルダ30aの上方に待機しており、基板P1の搬出動作完了後に基板ステージ20aが有する数の基板リフト装置46aに受け渡される。
(もっと読む)
物体搬出方法、物体交換方法、物体保持装置、物体交換システム、露光装置、フラットパネルディスプレイの製造方法、及びデバイス製造方法
【課題】基板ステージ上の基板の交換を迅速に行う。
【解決手段】 基板ステージ20aは、基板ホルダ30aから加圧気体を噴出して基板P1を浮上させ、基板ホルダ30aに内蔵された基板搬出装置70aを用いて、基板ホルダ30aの上面(基板載置面)をガイド面として基板P1を水平面に沿って移動させることにより基板ホルダ30aから搬出する。このため、基板P1に対する露光処理が終了した後、基板交換のために基板ステージ20aを基板交換位置に位置させる前に基板P1の搬出動作を開始することができる。次に露光予定の別の基板P2は、基板P1の搬出動作が行われる際、基板ホルダ30aの上方に待機しており、基板P1の搬出動作完了後に基板ステージ20aが有する数の基板リフト装置46aに受け渡される。
(もっと読む)
基板搬送装置、これを備える塗布現像装置、及び基板搬送方法
【課題】基板を保持して搬送する基板保持部の位置を検出することにより、基板の搬送を監視することができる基板搬送装置を提供する。
【解決手段】基板を支持する支持部を含む搬送機構と、ラインセンサ、及び該ラインセンサに光を照射する光源を含み、前記搬送機構が動作して前記支持部が移動したときに前記光が前記支持部により遮られ得るように配置される位置検出部と、前記ラインセンサからの信号に基づいて、前記搬送部の位置を検出する制御部とを備える基板搬送装置が提供される。
(もっと読む)
基板処理装置、基板処理装置制御プログラム、及び半導体装置の製造方法
【課題】待機中の基板収容器内の基板に対し、基板表面へのパーティクルの付着等の問題を抑制することができる基板処理装置を提供する。
【解決手段】基板を複数収容した基板収容器を複数載置する載置台と、前記載置台に載置された基板収容器の蓋を開閉する蓋開閉部と、蓋を開けられた基板収容器内の基板の有無又は位置を確認する基板確認を行う基板確認部と、基板収容器内の基板を処理室へ搬送する基板搬送機構と、前記基板搬送機構により搬送された前記処理室内の基板に対して処理を行う基板処理部とを備えた基板処理装置において、前記載置台に載置された第1の基板収容器内の基板を対象として基板処理中に、第2の基板収容器が前記載置台に載置された場合、前記第2の基板収容器の蓋を開けて、前記第2の基板収容器内の基板に対して前記基板確認部による基板確認を行った後に、前記第2の基板収容器の蓋を閉じる。
(もっと読む)
ワーク搬送装置及びワーク加工装置
【課題】コンパクトな構成でワークを汚すことなく搬送することができるワーク搬送装置及びワーク加工装置を提供する。
【解決手段】移動可能な第1アーム60には、ウェーハ把持機構72と、第1吸着保持機構74とが備えられる。また、移動可能な第2アーム66には、トレイ76と位置決め機構78と、第2吸着保持機構80とが備えられる。カセットCに格納されたウェーハWは、縁部をウェーハ把持機構72に把持されてカセットCから引き出され、トレイ76の上に載置される。トレイ76に載置されたウェーハWは、位置決め機構78によって位置決めされた後、第1吸着保持機構74によって吸着保持されて、ワークテーブル30に搬送される。加工後、ウェーハWは第2吸着保持機構80に吸着保持されて、ワークテーブル30から回収され、ワーク洗浄装置56に搬送される。
(もっと読む)
基板処理装置
【課題】真空処理室に設けられる基板載置台の表面部の状態の確認や当該表面部の交換を行うことによる真空処理の停止時間を短くすると共に、前記表面部の状態を精度高く管理すること。
【解決手段】基板が搬送される常圧雰囲気の常圧搬送室と、常圧搬送室とロードロック室を介して接続される真空処理室と、前記真空処理室に設けられ、本体部と、当該本体部に対して着脱自在な表面部とを有する基板載置台と、前記ロードロック室または常圧搬送室に設けられ、前記表面部を収納するための保管部と、常圧搬送室からロードロック室を介して真空処理室へ基板を搬送し、また前記保管部と前記真空処理室の本体部との間で前記表面部を搬送するための搬送機構と、を備えるように基板処理装置を構成する。これによって真空処理室の大気開放を防ぐと共に表面部の状態の確認が容易になるので当該表面部を精度高く管理することができる。
(もっと読む)
基板処理装置および基板処理装置の清掃装置
【課題】 回転機構を持たない基板処理装置であっても、基板と接触する部位を清掃することができる基板処理装置の清掃装置を提供する。
【解決手段】 清掃装置2は、処理されるウエハWと同じ外形のベース400と、ベース400の下面の周縁部に下向きに植設された清掃具であるブラシ402と、ブラシ402を動かす駆動源の振動発生装置404とからなり、ハンド11上で清掃装置2の振動発生装置404が振動してブラシ402が振動し、ハンド11のウエハ支持部材81の支持面86aを清掃する。
(もっと読む)
基板処理装置
【課題】占有スペースの削減、装置全体としての動作不能時間の短縮を可能にし、基板処理のスループットを向上させることができる基板処理装置を提供する。
【解決手段】基板を減圧雰囲気下で処理する複数の処理室が周囲に設けられており、該処理室との間で基板を搬入出する搬送機構を内部に有する複数の真空搬送室と、各真空搬送室に夫々設けられたロードロック室と、外部から供給された基板を一の前記ロードロック室へ搬送する第1大気搬送機構と、該第1大気搬送機構から基板を受け取り、受け取った該基板を他の前記ロードロック室へ搬送する第2大気搬送機構とを備え、前記第2大気搬送機構を前記一のロードロックが設けられている真空搬送室の上側又は下側に配し、前記複数の真空搬送室を、前記第2大気搬送機構による基板の搬送方向に沿って直列的に配する。
(もっと読む)
基板処理装置及び基板処理方法
【課題】大気開放の時間を短縮し、スループットを向上させた基板処理装置を提供する。
【解決手段】本発明の基板処理装置1は、チャンバ11と、前記チャンバ内に配され、基板2が載置されるステージ12と、ガス供給ライン13aを通じて、前記チャンバ内に所定のガスを導入するガス供給手段13と、前記チャンバ内の圧力P1 を検出する圧力センサ15と、前記ガスの導入圧力P2 を制御する制御手段16と、を備え、前記ガス供給手段が、前記チャンバ内に所定のガスを導入圧力P2 で導入して前記チャンバを真空状態から大気開放する際に、前記圧力センサは、チャンバ内の圧力P1 を検出し、前記制御手段は、前記P1 に対して、前記P2 と前記P1 との差が略一定となるように、前記P2 を制御すること、を特徴とする。
(もっと読む)
基板処理装置の制御方法
【課題】処理時間を短縮しスループットを向上するする。
【解決手段】複数の処理室C,Eが個別に仕切りバルブ3を介して連結された搬送室Tを介して処理室Cから処理室Eへ基板Sを移動させる搬送手段12を有する基板処理装置CTにおいて、搬送手段のロボットアーム12aを同一平面内の旋回動作及び伸縮動作させ、旋回方向に沿って配置された複数の処理室間で前記基板を搬送する際に、搬送手段の一連の動作および前記仕切りバルブの開閉動作を1つのコマンドで実行するとともに、複数の処理室における仕切りバルブが同時に開いた状態を有してなる。
(もっと読む)
基板処理装置及び基板処理方法
【課題】装置稼働率を向上することができる基板処理装置及び基板処理方法を提供する。
【解決手段】本発明に係る基板処理装置は、基板の表面に向かってマイクロ波を供給する
マイクロ波供給部、及び、基板の表面に向かって不活性ガスを供給するガス供給部を少な
くとも備える処理室と、前記処理室において処理がなされた基板を冷却する冷却機構を備
える搬送室、及び、前記冷却機構によって冷却された基板を搬送する搬送機構を少なくと
も備える搬送室とより少なくとも構成される。
(もっと読む)
基板処理装置及び基板処理方法
【課題】スループットを低下させることなく、時間のロス無しに基板のアライメントを可能とした基板処理装置を提供する。
【解決手段】本発明の基板処理装置は、基板2を出し入れする仕込/取出室3と、前記基板に対して所定の真空処理を行う処理室と、前記仕込/取出室と前記処理室との間における前記基板の受け渡しを行う搬送室と、を備えた基板処理装置であって、前記仕込/取出室は、真空排気可能なチャンバ11と、前記チャンバ内に配され、前記基板が載置される支持部12と、前記支持部上に載置された前記基板の位置ずれ量を検出する測定部と、前記測定部によって検出された前記基板の位置ずれ量に応じて、前記基板の位置を修正するアライメント部と、を有することを特徴とする。
(もっと読む)
ウエーハ及びウエーハの搬送方法
【課題】 搬送時に円形凹部の底面を異物で汚染することのないウエーハ及びウエーハの搬送方法を提供することである。
【解決手段】 円形凹部と該円形凹部を囲繞する環状凸部とを裏面に備えるウエーハであって、該円形凹部の直径が該環状凸部の上面から該円形凹部の底面に向かって大きくなる様に該環状凸部の内周壁が傾斜していることを特徴とする。搬送方法は、複数の支持指を円形凹部内に挿入し、支持指で環状凸部の内周壁上方を支持した状態でウエーハを搬送する。
(もっと読む)
搬送ロボット
【課題】直動搬送機構を用いることなく省スペース化を図ること。
【解決手段】搬送ロボット10は、スイングアーム部11と、アームユニット12とを備える。スイングアーム部11は、基端部に設けられたスイング軸P1を中心として水平方向に揺動する。アームユニット12は、スイングアーム部11の先端部に設けられた鉛直な旋回軸P2を中心として回転する本体部121と、本体部121に連結され水平方向に伸縮する右伸縮アーム部122Rおよび左伸縮アーム部122Lと、右伸縮アーム部122Rおよび左伸縮アーム部122Lの先端にそれぞれ設けられたワーク保持部123R,123Lとを備える。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】基板処理(JOB)開始時に基板処理で使用される処理室に対して、予め必要と思われる前処理を一括で実施することにより、大気搬送ロボットの待機状態を解消し、基板処理(JOB)の処理スループットの向上を図る。
【解決手段】基板を処理する処理室と、前記処理室に連接され、前記基板を搬送する搬送手段を備える搬送室と、基板を格納する基板収容器が載置される基板載置台と、前記基板収容器から最初の基板を搬出するときに、前記基板を処理する際に使用される全ての処理室を前処理するように制御する制御手段で少なくとも構成されている。
(もっと読む)
被処理体の搬送方法及び被処理体処理装置
【課題】各種処理における処理時間を短縮しても生産性が頭打ちになる事情を抑制できる被処理体の搬送方法を提供すること。
【解決手段】第1トランスファアームを伸縮させ、処理室32aに収容された処理済の被処理体(a)を第1ピック35aに受け取らせる工程と、第1、第2トランスファアームを旋回させ、処理前の被処理体(1)を保持した第2ピック35bを処理室32a前に設定された受け渡し位置に移動させるとともに、処理済の被処理体(a)を保持した第1ピック35aをロードロック室41bの前に設定された受け渡し位置に隣接する位置に移動させる工程と、第2トランスファアームを伸縮させ、第2ピック35bに保持された処理前の被処理体(1)を処理室32aに収容する工程と、第2トランスファアームを旋回させ、被処理体を保持していない第2ピック35bをロードロック室41bの前に設定された受け渡し位置に移動させる工程と、を備える。
(もっと読む)
21 - 40 / 389
[ Back to top ]