
Fターム[5F031GA50]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 複数のアームを有するもの (389)
Fターム[5F031GA50]に分類される特許
41 - 60 / 389
基板処理装置、基板処理方法、ならびに、プログラム
【課題】基板搬送を効率的に行うとともに、精度の高い基板の搬送処理に対応することができる基板処理装置、基板処理方法ならびに、プログラムを提供する。
【解決手段】複数のアーム103a、103bにより、同一水平線上で且つ水平位置と高さとが互いに異なる位置で把持した基板を処理室200に搬送する。処理室200に搬送された基板は、複数のアーム103a、103bの基板把持位置に対応する高さを有し、水平方向に並列に配置された複数の基板載置台206a、206bに載置される。また、排気処理は、第1室207の排気を第2室208の排気が開始する前に開始する。
(もっと読む)
真空処理装置の運転方法

【課題】作業効率が良く精度の高いティーチングを行って処理の効率を向上できる真空処理装置の調整方法を提供する。
【解決手段】その上面に所定の波長の光の反射の特性を局所的に異ならせた特定の箇所を有した調整用の試料を前記試料台の上面の特定の位置と前記特定の箇所とを合わせて載置した後、前記真空容器の内部を封止した状態で前記ロボットを移動させて前記ロボットのアーム上の所定の位置に配置され前記反射した所定の波長の光の通過部を前記調整用の試料の前記特定の箇所の上方に移動させ、その移動の際に前記調整用の試料から向かって前記通過部を通過した光を前記板部材の外側で検知し、検出した前記光の量に応じて前記試料の特定の箇所と前記ロボットの所定の位置との位置合わせを行う。
(もっと読む)
基板処理方法、基板処理装置
【課題】 製品基板の処理において、戻り処理が必要となる場合であっても、無駄なダミー基板処理を低減すること。
【解決手段】 基板処理方法は、複数の基板のそれぞれに対して、第1処理を実行し、第1処理が実行された基板に、第2処理を実行する実行工程と、複数の基板のそれぞれに対して、第1および第2処理が実行された基板を退避室に回収する回収工程と、複数の基板のうち、最後の基板に対して第1処理が完了した後に、第1処理室にダミー基板を搬入し、ダミー基板に第3処理を実行し、さらにダミー基板を第1処理室から搬出する調整工程と、調整工程でダミー基板が第1処理室から搬出された後、回収工程において回収された基板を、第1処理室に搬入し、第3処理を実行する第2実行工程と、を有する。
(もっと読む)
基板搬送装置
【課題】2段のピンセットによる搬入出動作を同じタイミングで行い、基板搬送に係る処理時間を短縮する。
【解決手段】基台上に相対向して立設された一対の第一及び第二の昇降軸7,8と、前記第一の昇降軸に沿って昇降自在に設けられると共に、第一のピンセット15をステージに対し進退移動させる第一の進退移動手段13と、前記第一の進退移動手段を前記第一の昇降軸に沿って昇降移動させる第一の昇降手段11と、前記第二の昇降軸に沿って昇降自在に設けられると共に、第二のピンセット16をステージに対し進退移動させる第二の進退移動手段14と、前記第二の進退移動手段を前記第二の昇降軸に沿って昇降移動させる第二の昇降手段12と、前記第一及び第二の進退移動手段の駆動制御、及び前記第一及び第二の昇降手段の駆動制御を行う制御手段19とを備える。
(もっと読む)
搬送ロボット及びその基板搬送方法
【課題】移動速度を上げなくても搬送時間を短縮することができる搬送装置を提供する。
【解決手段】搬送ロボット50は、第1及び第2ハンド52,53を備えている。第1及び第2ハンド52,53は、基板6を夫々保持する2つのブレード56を有している。また、搬送ロボット50は、回動ユニット、第1進退ユニット、第2進退ユニット、昇降ユニットを有しており、これら4つのユニットにより第1及び第2ハンド52,53を基板6が載置されている基板搬送中継装置25及び4つのプロセスチャンバ23に夫々移動させることができるようになっている。
(もっと読む)
基板処理装置,基板処理方法及び記録媒体
【課題】ウェハを低圧状態で処理する場合であっても,ウェハに対するパーティクルの付着や損傷の発生を防止しながら,ウェハの温度を効率的に調節できる基板処理装置及び基板処理方法を提供する。また,かかる基板処理装置及び基板処理方法に用いられる記録媒体を提供する。
【解決手段】基板Wを処理室32に搬入し,載置台40の上面に設けられた当接部材42に基板Wの下面を当接させ,基板Wと載置台40との間に隙間Gを形成した状態で,載置台40に基板Wを載置させる。そして,処理室32を所定の圧力にした状態で,載置台40の温度を調節することにより,当接部材42に支持された基板Wの温度を調節する。その後,処理室32を所定の圧力より低い圧力の処理雰囲気にして,基板Wに所定の処理を施す。
(もっと読む)
基板搬送装置、電子デバイスの製造システムおよび電子デバイスの製造方法
【課題】位置決めの再現性、制御応答性及びサーボ剛性を向上できる基板搬送装置を実現する。
【解決手段】基板搬送装置は、基板を保持することが可能な基板保持器と、前記基板保持器を進退動作させるリンク部と、前記リンク部を動作させる駆動力を発生する駆動部と、前記基板保持器及び前記リンク部のいずれか一方に設けられたガイドバーと、前記基板保持器及び前記リンク部のいずれか他方に設けられ、前記リンク部の動作により前記基板保持器が移動する際に前記ガイドバーをスライド可能に支持する支持部と、を有する。
(もっと読む)
搬送装置
【課題】リンクアーム機構を有する搬送装置において、特にリンクアーム機構を冷却し、高温状態のワークからの輻射熱の影響を減少させることができる搬送装置を提供する。
【解決手段】搬送装置100は、真空空間内においてワーク200を搬送するためのリンクアーム機構2と、リンクアーム機構2を鉛直軸周りに回転可能に軸支する旋回軸3と、を備える搬送装置であって、リンクアーム機構2は、下段アーム31L・31Rと、下段アーム31L・31Rと連結される上段アーム33L・33Rと、上段アーム33L・33Rの他端と連結されるワーク200を支持する水平移動部材22L・22Rと、を有し、上段アーム33L・33Rと水平移動部材22L・22Rとの間に冷却板25L・25Rを配置した。
(もっと読む)
基板搬送装置、基板搬送方法及び記憶媒体
【課題】基板を保持部材に真空吸着して搬送するにあたって、保持部材の外における真空配管の引き回しが不要で、速やかに基板を搬送することができる技術を提供すること。
【解決手段】保持部材である第1のアーム2a及び第2のアーム2bに夫々真空ポンプ42a、42b及びバッテリー41a、41bを搭載すると共に、搬送基体1から送電コイル14a、14b及び受電コイル44a、44bを介して電磁誘導方式により非接触でバッテリー41a、41bを充電することにより、各アーム2a、2bにおいて外部からの配管及び電気配線なしで、真空ポンプ42a、42b、電磁弁43a、43b及び圧力検出部45a、45bなどの各アーム2a、2bに搭載された電子部品をバッテリー41a、41bからの電力により動作するようにする。
(もっと読む)
異常原因分析方法及び異常分析プログラム
【課題】プラズマ処理されたウエハの異常原因を分析する。
【解決手段】クラスタ型のプラズマ処理システム10に配置された2以上のプロセスモジュールの少なくともいずれかにおいてプラズマ処理されたウエハWの異常原因分析方法であって、ウエハWがフープ115a〜115cから搬出され、前記2以上のプロセスモジュールの少なくともいずれかに搬送された後、前記フープ115a〜115cに戻るまでの搬送経路の情報を前記ウエハW毎に該ウエハの識別情報に関連付けて記憶する記憶工程と、処理済のウエハWの状態を検査する検査工程と、前記検査工程の結果、異常と判定されたウエハWの前記記憶された搬送経路の情報と、正常と判定されたウエハWの前記記憶された搬送経路の情報とを比較し、比較の結果に基づき異常原因の分析を行う異常分析工程と、を含む異常原因分析方法を提供する。
(もっと読む)
基板吸着方法およびその装置
【課題】 反りが発生している半導体ウエハの下面全面を吸着テーブル上に確実に吸着させる。
【解決手段】 反りが発生している半導体ウエハ21Aを吸着テーブル57の上面に載置する。次に、吸着テーブル57上に載置された半導体ウエハ21A上の封止膜11上にフィルム79を半導体ウエハ21Aおよびその周囲における吸着テーブル57を覆うように載置する。次に、吸着テーブル57の吸引孔57aが減圧状態になると、フィルム79下の空気が吸引孔57a内に吸引され、フィルム79下が減圧状態となり、フィルム79で半導体ウエハ21Aを全面的に押え付けることにより、半導体ウエハ21Aがその反りを矯正されて吸着テーブル57の上面に吸着される。
(もっと読む)
基板搬送機構、基板処理装置および半導体装置の製造方法
【課題】基板の搬送にあたり、基板変形によるキズやパーティクル等の発生を抑制するとともに、基板変形に伴う基板保持力低下を抑制して安定した高速搬送を実現可能とする。
【解決手段】搬送対象物である基板の支持基体となる板状体と、板状体の面上に設けられた複数の凸部が基板の径より小さい円周状に配置されてなる基板支持部と、を有する。
(もっと読む)
基板処理システム及び基板搬送方法
【課題】基板の処理効率を向上させることができる基板処理システムを提供する。
【解決手段】基板処理システム10のロードロックモジュール13では、該ロードロックモジュール13の内部において上部基板搬送機構22及び下部基板搬送機構23が互いに独立して上下動し、上部基板搬送機構22では、昇降ベース26に配された4つのガイドレール25に対して4つのガイドアーム27がプロセスチャンバ11へ向けて相対的に摺動し、各ガイドアーム27に対して4つのピック28がプロセスチャンバ11へ向けて相対的に摺動し、下部基板搬送機構23では、昇降ベース30に配された4つのガイドレール29に対して4つのガイドアーム31がプロセスチャンバ11へ向けて相対的に摺動し、各ガイドアーム31に対して4つのピック32がプロセスチャンバ11へ向けて相対的に摺動する。
(もっと読む)
基板搬送装置
【課題】可動の支持部により基板を支持しながら、基板を支持する構成の軽量化を図ること。
【解決手段】基板を支持する支持手段と、前記支持手段を所定の基板受け渡し地点に移動させる移動手段と、を備えた基板搬送装置であって、前記支持手段は、前記基板を支持する支持位置と基板の支持を解除する支持解除位置との間で移動可能な可動支持部を少なくとも含み、前記基板を支持する複数の支持部と、前記可動支持部を、前記支持位置に位置させる方向に付勢する付勢手段と、を含み、前記基板搬送装置は、更に、前記基板受け渡し地点に配置され、前記付勢手段の付勢力に抗して前記可動支持部を前記支持位置から前記支持解除位置に移動する支持部移動手段を備えたことを特徴とする。
(もっと読む)
真空処理装置
【課題】搬送チャンバー内にシリコン基板を搬送したときに、シリコン基板が面内温度分布に起因して反ることがない真空処理装置の提供。
【解決手段】真空雰囲気でシリコン基板26に回路を形成する複数の処理を、それぞれ順次実行する為の複数のプロセスチャンバー2〜5と、複数のプロセスチャンバー2〜5に隣接し、シリコン基板26をプロセスチャンバー2〜5内へ搬入しプロセスチャンバー2〜5内から搬出する搬送機構19を有する搬送チャンバー1とを備える真空処理装置。ガスを吹き出す吹出口22〜25と、搬送チャンバー1内のガスを外部へ排気する排気口31とを搬送チャンバー1内に備え、搬送機構19がプロセスチャンバー22〜25から搬出し停止させたシリコン基板26へ吹出口22〜25からガスを吹出させる構成である。
(もっと読む)
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体
【課題】処理済ウエハを搬送するときにも未処理ウエハより速度を上げて搬送可能とし,これによって従来以上に処理全体のスループットを向上させる。
【解決手段】ローダアーム機構200のピックを基板保持可能範囲を拡大して位置ずれが発生してもウエハを保持できるようにし,トランスファアーム機構300を搬送制御する際,そのピック上に未処理ウエハWがあるか否かを判断し,未処理ウエハなしと判断した場合は,ピック上にウエハなしの場合のみならず,処理済ウエハありの場合についても,ピック上に未処理ウエハありと判断した場合よりも速い速度で搬送制御する。
(もっと読む)
基板処理装置及び基板搬送方法並びにその方法を実施するためのプログラムを記憶する記憶媒体
【課題】ピックによる基板保持時に基板の異常を判定することで,異常な基板の搬送処理を続行することによる不具合を未然に防止する。
【解決手段】基板が水平方向に移動しないように規制する規制体420と,押圧体440をスライド駆動させて,ウエハWの端部を規制体に押しつけることによって保持する押圧保持部430と,押圧体を駆動させるとともに,その押圧体の位置情報を出力可能な押圧体駆動部442とを有するピックを備え,このピックの基板保持時に押圧体をスライド駆動させてその押圧体が停止した位置を検出し,その検出位置が異常判定閾値以上にピックの先端側にある場合にはその基板は異常であると判定し,その基板の搬送処理を停止する。
(もっと読む)
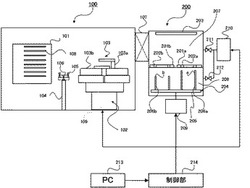
真空処理装置
【課題】ウエハ処理の効率化を図り、真空処理室あるいは搬送中継室内の雰囲気ガスが他の真空搬送室あるいは搬送中継室内に流出することによる汚染を抑制する。
【解決手段】被処理基板をロック室に搬送する大気搬送装置を収容した大気搬送室106と、第1の真空処理装置を備え、前記ロック室にある被処理基板を前記第1の処理装置に搬入、搬出する第1の搬送装置を備えた第1の真空搬送室104と、第2の真空処理装置を備え、処理基板を前記第2の処理装置に搬入、搬出する第2の搬送装置を備えた第2の真空搬送室111と、第1の真空搬送室と第2の真空搬送室の間で被処理基板を受け渡しするための搬送中継室112と、前記第1および第2の真空搬送室にガスを供給するとともに、前記処理室、第1および第2の真空搬送室、および搬送中継室のガスを排気するガス供給系を備え、前記真空搬送室のガス圧は、真空処理室および搬送中継室よりも高く設定する。
(もっと読む)
基板処理装置
【課題】スループットの向上が可能な基板処理装置を提供する。
【解決手段】基板処理装置100は、互いに並列に設けられたインデクサブロック10、第1の処理ブロック11および第2の処理ブロック12からなる。インデクサブロック10には、インデクサロボットIRが設けられている。第1の処理ブロック11には、第1のメインロボットMR1が設けられている。第2の処理ブロック12には、第2のメインロボットMR2が設けられている。インデクサブロック10と第1の処理ブロック11との間には、複数の基板Wを同時に反転させるための反転ユニットRT1aが設けられている。
(もっと読む)
基板処理装置
【課題】 基板の搬送効率を高め、基板処理工程の生産性を向上させる。
【解決手段】 m番目に基板を処理する第m処理室が少なくとも設けられる第m搬送室と、第m搬送室に連通可能に構成された第m中継室と、第m中継室に連通可能に構成され、(m+1)番目に基板を処理する第(m+1)処理室が少なくとも設けられる第(m+1)搬送室と、を備え、いずれかの処理室内外への基板の入替動作の時間をTとしたときに、n枚目の基板の第(m+1)処理室内での処理の開始時が、(n+1)枚目の基板の第m処理室内での処理の開始時から2T遅れる。
(もっと読む)
41 - 60 / 389
[ Back to top ]