
Fターム[5F031JA36]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 検出する情報 (3,081) | 形状の情報 (1,435) | エッジ、端面 (230)
Fターム[5F031JA36]に分類される特許
1 - 20 / 230
部品供給装置および部品位置認識方法
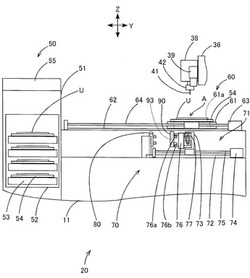
【課題】ウエハの円周位置を簡易且つ確実に精度良く検出し、ウエハカット部品の位置を高精度に認識することができる部品供給装置および部品位置認識方法を提供すること。
【解決手段】部品供給装置20は、部品突上げ装置70の第2移動装置71に装着されたウエハ照明装置80で部品供給位置Aに搬送されたウエハUに対し下方から光を広角に照射し、部品装着装置30の第1移動装置31に取付けられたカメラ39でウエハUの円周の一部を撮像する。このため、画像にはウエハUの表面に形成された回路等は写り込まず、ウエハUは影として写ることになる。これにより、ウエハUの円周位置を簡易且つ確実に精度良く検出し、ウエハカット部品Pの位置を高精度に認識することができる。よって、従来の光センサは不要となり、部品供給装置20の低コスト化および小型化を図ることができる。
(もっと読む)
基板搬送システム

【課題】搬送アームのベース上方に設けた撮像装置だけで,搬送アームのピック上の基板を検出する。
【解決手段】搬送アーム210と共に旋回自在に支持され,ピック側に配置されるピック側ミラー310を備えたピック側ユニット304とベース側に配置されるベース側ミラー312を備えたベース側ユニット306とを少なくとも有し,ピック側ミラーはピックに保持されたウエハWの周縁を含む画像をベース側に向けて反射するように配置し,ベース側ミラーはピック側ミラーからの画像をベースの上側に向けて反射するように配置したミラーユニットと,ベース側ミラーからの画像が撮像領域に含まれるようにベースの上方に設けられた撮像装置130とを設け,撮像装置で取り込んだ当該画像に基づいて基板状態を検出する。
(もっと読む)
基板載置方法
【課題】基板載置装置を用いて基板を位置決め状態で載置する基板載置方法を提供する。
【解決手段】リフトピン8を上昇させるとともに、基板除給材部20を駆動させて基板17を作業開始位置に向けて搬入開始するステップと、基板17を基板テーブル6の作業開始位置の直上に位置させて基板17の搬入を完了させ、基板保持アーム21を下降させて基板17をリフトピン8上に載置するステップと、基板保持アーム21の後退を開始するとともに第1のカメラ75aにより基板17の位置を検出し第1補正量を計算するステップと、リフトピン8を下降させるとともに、第1補正量に基づき基板17の位置を補正する第1位置補正ステップと、基板テーブル6に基板17を吸着するステップと、第2のカメラ75bにより基板17の位置を検出し第2補正量を計算するステップと、第2補正量に基づき基板17の位置を補正する第2位置補正ステップと、を含む基板載置方法。
(もっと読む)
アーム型搬送装置
【課題】アーム型搬送装置とは別の場所に設置したアライナー等に逐一搬送対象物を搬送することなく、搬送対象物の中心位置を検出可能なアーム型搬送装置を提供する。
【解決手段】正円形搬送対象物Wを保持する第一のリンク21を回転軸C1を介して水平面内で回動可能となるようにベース部材たる第二のリンク22に取り付けたアーム機構2と、前記第二のリンク22に前記回転軸C1とともに取り付けられ、取り付け位置に応じて定まる検出位置Seに正円形搬送対象物Wのエッジが位置したことを検出するエッジ検出部3と、前記第二のリンク22に対する前記第一のリンク21の回転角度θを検出する回転角度検出部27と、正円形搬送対象物Wのエッジがエッジ検出部3を通過した際に回転角度検出部27で検出された対応する回転角度θに基づいて前記リンク21に対する正円形搬送対象物Wの中心位置を算出する中心位置算出部41とを具備して構成した。
(もっと読む)
位置合わせ方法、露光方法、デバイス製造方法、及びフラットパネルディスプレイの製造方法
【課題】基板を露光する途中での、基板の取り外しを前提とする基板保持部材の採用を可能にする位置合わせ方法を提供する。
【解決手段】 基板P上に複数の区画領域(SA1、SA2等)を形成するに当たり、基板P上に区画領域を形成する度毎に、基板Pを該基板Pの面に平行な面内でステップ移動し、該ステップ移動の前後で、基板Pの同一の検出対象部(例えばエッジ)の位置情報を例えば複数のセンサ122X1、122X2、122Y1を用いて検出し、その検出結果に基づいて、区画領域の形成の際に、基板Pを露光領域IAに対して位置合わせする。
(もっと読む)
物体処理装置、フラットパネルディスプレイの製造方法、デバイス製造方法、物体搬送装置、及び物体の搬入方法
【課題】露光装置内への基板の搬入を効率よく行う。
【解決手段】 液晶露光装置内に基板P3を搬入する方法は、露光領域内で基板P3を保持可能な基板ステージ20に対して基板P3を搬送する基板搬入装置80aが有するフォークハンド83を上記露光領域外(ポート部60の上方の領域)に位置させることと、外部搬入ロボット90bが有するロードハンド91bに下方から支持された基板P3をフォークハンド83の上方に位置させることと、ロードハンド91bに下方から支持された基板P3をロードハンド91b上からフォークハンド83上に載せ替えることと、を含む。
(もっと読む)
真空処理装置および真空処理方法
【課題】位置ずれの量を抑制してダウンタイムを低減できる真空処理装置または真空処理方法を提供する。
【解決手段】内側が減圧される処理室及びこの処理室内に配置された試料台を有する真空容器と、この真空容器と連結されて前記ウエハを2つのアームの何れかに載せて搬入または搬出するロボットと、このロボットが前記ウエハを搬入または搬出する際にこのウエハの所定の位置のズレの量を検出する手段と、この検出されたズレの量に基づいて前記ロボットの動作を調節する調節器とを備え、前記調節器は、予めティーチングを行った結果に基づいて前記ロボットの動作を調節するものであって、前記ロボットが予めティーチングを行った後にウエハを所定のパターンで搬送した際に検出されたウエハの位置ズレの量の情報に基づいて再度のティーチングを行った後にウエハの処理を行う。
(もっと読む)
基板搬送装置
【課題】走行中の基板を基板停止位置で停止させる時間を短くすることができ、タクトタイムが無駄に長くなるのを抑えることができる基板搬送装置を提供する。
【解決手段】基板を搬送する搬送部と、前記搬送部を駆動させることにより、基板を加速、定速、減速走行させるとともに、基板を特定の割合で減速させる設定減速度が設定可能な搬送駆動部と、前記搬送駆動部を制御する駆動制御部と、を備える基板搬送装置であって、前記搬送部には、走行中の基板の位置を検知する位置センサーと、走行中の基板を停止させる基板停止位置が設定されており、前記駆動制御部は、前記基板停止位置と設定減速度とから減速開始遅延時間を演算し、前記位置センサーにより定速走行中の基板が検知された後、減速開始遅延時間だけ基板を定速で走行させ、減速開始遅延時間経過後、減速を開始させる。
(もっと読む)
基板処理装置、および薄膜太陽電池の製造装置
【課題】基板処理装置のセンサ誤作動を抑制する。
【解決手段】本発明に係るスパッタリング装置1は、発光端面65aと受光端面66aとの少なくとも一方を端面として備えた光ファイバ65・66がチャンバ2内に配置された光ファイバセンサ6を備え、光ファイバセンサ6の端面は、チャンバ2の底面から所定の高さ位置で、水平方向に対して上向きに配置されている。
(もっと読む)
基板位置検出方法
【課題】基板を検出する検出手段の数を少なくしても、基板の位置ズレを確実に検出可能な基板位置検出方法を提供する。
【解決手段】1つの検出手段51に対して、基板15に設定された3つの検出位置E1〜E3が順次重なるように基板15を移動させる(検出工程)。次に、得られた第一検出位置E1、第二検出位置E2、および第三検出位置E3における基板15の検出タイミング(基板検出信号)と、ロボットハンドの移動量とから、ロボットハンドに対する基板15の実際の中心位置(検出値)を算出する。
(もっと読む)
ロボットシステム
【課題】ウエハを多段に収納するカセット内のウエハを安全に取り出すこと。
【解決手段】進入可否判定部が、移載対象となるウエハの直下および直上のクリアランスに基づいてハンドが進入可能であるか否かを判定する。そして、進入可否判定部によって進入可能であると判定されたならば、位置補正部は、ハンドの最終的な進入位置を、マッピングされた収納位置に基づいて算出し、算出した進入位置に基づいてロボットを制御するようにロボットシステムを構成する。
(もっと読む)
基板搬送装置
【課題】搬送ロボットのθ軸が回転した時の角度誤差を検出することが可能であり、検出した角度誤差からθ軸の角度補正を行う機能を有する基板搬送装置を提供する。
【解決手段】アーム13を有し基板7を搬送する搬送ロボット2と、基板7を外部に搬送するための開口部8とを備える。搬送ロボット2は、θ軸モータによりアーム13を回転させ、R軸モータ110によりアーム13を伸縮させる。開口部8のフレームに、投光器から受光器へセンサ光を投射する検出センサ4、4’を備える。搬送ロボット2が、アーム13を伸縮して、開口部8を通して基板7を搬送する過程において、基板7が検出センサ4及び検出センサ4’のセンサ光を遮光し始めた時と、検出センサ4及び検出センサ4’がセンサ光の遮光が終了して再び受光し始めた時との、R軸モータ110の回転角度を用いて、θ軸モータの回転角度とアーム13の回転角度との差である角度誤差αを求める。
(もっと読む)
基板搬送方法、基板搬送装置、及び塗布現像装置
【課題】基板搬送装置のバキューム機構に用いられるパッドからの基板のずれを検出可能な基板搬送方法を提供する。
【解決手段】この基板搬送方法では、複数の載置部のうちの一の載置部の基板を保持部で受け取って保持し、保持部に保持される基板を一の載置部から搬出し、保持部に保持される基板の保持部に対する位置(第1の位置)を検出し、保持部に保持される基板を他の載置部に臨む場所まで搬送し、その場所において、保持部に保持される基板の保持部に対する位置(第2の位置)を検出し、第1の位置及び第2の位置に基づいて、搬送前後において生じた、基板の保持部に対する位置ずれ量を算出し、算出された位置ずれ量が所定の範囲に入るか否かを判定する。
(もっと読む)
基板処理方法、その基板処理方法を実行させるためのプログラムを記録した記録媒体、基板処理装置及び基板処理システム
【課題】基板毎に外径寸法が変動した場合でも、基板の周辺部における塗布膜を除去する領域の幅寸法を一定にすることができる基板処理方法を提供する。
【解決手段】表面に塗布膜が形成された基板を回転させた状態で、基板の周辺部の表面にリンス液供給部80によりリンス液を供給することによって、リンス液を供給した位置の塗布膜を選択的に除去する基板処理方法において、基板を予め基板搬送部A3により搬送する際に、基板搬送部A3に設けられた検出部5により、基板の周辺部の位置を検出し、検出した位置に基づいて、周辺部の表面にリンス液を供給する時のリンス液供給部80の位置を決定する。
(もっと読む)
ロードロックモジュール、ウエハ加工処理システム及びウエハの加工処理方法
【課題】ウエハの冷却による反りを検出し、ウエハの落下または破損を未然に防ぐことができるロードロックモジュール、該ロードロックモジュールを備えるウエハ加工処理システム、該ウエハ加工処理システムで行われるウエハの加工処理方法を提供する。
【解決手段】ウエハ10を冷却する冷却部12を備えるロードロックモジュール1において、前記冷却部12の冷却によって前記ウエハ10に生じる反りを検出する検出部を備えることを特徴とするロードロックモジュール1を提供する。
(もっと読む)
基板処理装置
【課題】真空処理室に設けられる基板載置台の表面部の状態の確認や当該表面部の交換を行うことによる真空処理の停止時間を短くすると共に、前記表面部の状態を精度高く管理すること。
【解決手段】基板が搬送される常圧雰囲気の常圧搬送室と、常圧搬送室とロードロック室を介して接続される真空処理室と、前記真空処理室に設けられ、本体部と、当該本体部に対して着脱自在な表面部とを有する基板載置台と、前記ロードロック室または常圧搬送室に設けられ、前記表面部を収納するための保管部と、常圧搬送室からロードロック室を介して真空処理室へ基板を搬送し、また前記保管部と前記真空処理室の本体部との間で前記表面部を搬送するための搬送機構と、を備えるように基板処理装置を構成する。これによって真空処理室の大気開放を防ぐと共に表面部の状態の確認が容易になるので当該表面部を精度高く管理することができる。
(もっと読む)
基板受け渡し装置、基板受け渡し方法及び基板処理装置
【課題】基板搬送機構の保持部材に基板を水平に保持し、昇降部材を介して載置台に基板を受け渡すにあたって、受け渡しに要する時間を短縮できる技術を提供すること。
【解決手段】保持部材23の保持部に水平に保持されたウエハWa(Wb)を昇降ピン37a(37b)を介して載置台3a(3b)に受け渡すにあたって、保持部材23上のウエハWa、Wbの位置を検出し、その検出結果に基づいて保持部材23を移動させると共に、昇降ピン37a(37b)の上昇のタイミングを求め、保持部材23を移動させながら昇降ピン37a(37b)を突き上げてウエハWa(Wb)を受け取るようにしている。そしてウエハWa(Wb)を昇降ピン37a(37b)に受け渡す動作が安定するように減速区間を設定し、それ以外の区間では、従来通り高速で保持部材23を移動させる。
(もっと読む)
ワークの中心位置合わせ装置
【課題】回転動作を停止させることなく回転動作中にワークの中心位置を回転軸の中心に合わせることが可能な位置合わせ装置を提供する。
【解決手段】ワークWを載せる載置台21と、載置台21の下側に配置され且つ載置台21を平面上で直交する2方向に移動させるXYステージ22と、XYステージ22を駆動させるX軸駆動部6,Y軸駆動部7と、XYステージ22を下方から回転可能に支持しXYステージ22の原点に一致する回転軸と、回転軸を回転駆動させる回転軸駆動部8と、ワークWのエッジ位置を検出するエッジ位置検出手段3とを備え、制御部4によって、回転軸を回転駆動させながらエッジ位置情報及び回転角度情報に基づきワークWの中心位置を回転軸の中心に一致させるために要するXYステージ22の移動量を算出し、移動量に基づいてX軸駆動部6又はY軸駆動部7の少なくとも何れか一方を作動させるようにした。
(もっと読む)
温度制御方法及びプラズマ処理システム
【課題】ウエハの温度を精度良く制御する方法を提供する。
【解決手段】ウエハの裏面膜の種類の測定結果を取得する取得ステップと、チャンバ内に投入されるパワーと裏面膜の種類とウエハの温度とを対応付けて記憶した第1のデータベース330から、前記測定結果であるウエハの裏面膜の種類と、前記ウエハを処理するために投入されるパワーとに対応したウエハの温度を選択する選択ステップと、前記選択されたウエハの温度に基づき、前記ウエハの温度を調整する調整ステップと、を含むことを特徴とする。
(もっと読む)
基板搬送装置及び基板搬送方法
【課題】被処理基板を平流し搬送する基板搬送装置において、前記基板に対し所定の処理が施される直前に、該基板の位置ずれの有無を検出し、基板位置ずれに起因する不具合の発生を防止する。
【解決手段】基板Gを保持する基板保持手段7と、前記基板保持手段を基板搬送路2に沿って移動させる搬送手段6と、前記基板保持手段に保持された前記基板の幅方向の両側において、それぞれ前記基板の前端または後端を検出し、基板搬送方向における所定の基準位置に対するずれ量をそれぞれ検出するずれ量検出手段16A,16B,32,33,34,35,36,37と、前記ずれ量検出手段により検出された前記基板の幅方向両側における2つのずれ量に基づき、前記搬送手段を制御する制御手段10とを備える。
(もっと読む)
1 - 20 / 230
[ Back to top ]