
Fターム[5F031KA11]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 位置決め (4,282) | 中心を合わせるもの (291)
Fターム[5F031KA11]に分類される特許
1 - 20 / 291
検出方法
部品供給装置および部品位置認識方法
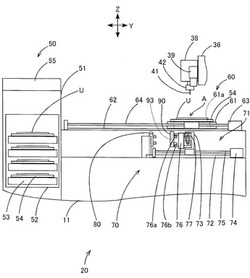
【課題】ウエハの円周位置を簡易且つ確実に精度良く検出し、ウエハカット部品の位置を高精度に認識することができる部品供給装置および部品位置認識方法を提供すること。
【解決手段】部品供給装置20は、部品突上げ装置70の第2移動装置71に装着されたウエハ照明装置80で部品供給位置Aに搬送されたウエハUに対し下方から光を広角に照射し、部品装着装置30の第1移動装置31に取付けられたカメラ39でウエハUの円周の一部を撮像する。このため、画像にはウエハUの表面に形成された回路等は写り込まず、ウエハUは影として写ることになる。これにより、ウエハUの円周位置を簡易且つ確実に精度良く検出し、ウエハカット部品Pの位置を高精度に認識することができる。よって、従来の光センサは不要となり、部品供給装置20の低コスト化および小型化を図ることができる。
(もっと読む)
接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体

【課題】被処理基板と支持基板を適切に接合する。
【解決手段】接合装置の接合部113は、被処理ウェハWを保持する第1の保持部200と、第1の保持部200に対向配置され、支持ウェハSを保持する第2の保持部201と、第2の保持部201に保持された支持ウェハSを覆うように設けられた鉛直方向に伸縮自在の圧力容器271を備え、当該圧力容器271内に気体を流入出させることで第2の保持部201を第1の保持部200側に押圧する加圧機構270と、第1の保持部200、第2の保持部201及び圧力容器271を内部に収容し、内部を密閉可能な処理容器290と、処理容器290内の雰囲気を減圧する減圧機構300と、を有している。
(もっと読む)
搬送装置
【課題】円板状板状物の中心がずれた状態の円板状板状物ユニットでも、搬送先のチャックテーブルに中心を位置合わせして搬送可能な搬送装置を提供する。
【解決手段】環状フレームFに円板状板状物の貼着された円板状板状物ユニットを搬送先のチャックテーブルへ搬送する装置2は、前記円板状板状物ユニットの吸引保持と該チャックテーブルの中心位置合わせを行なう吸引保持位置合わせ機構と、該吸引保持位置合わせ機構の移動機構とを具備し、前記吸引保持位置合わせ機構は、環状フレームFを吸引保持する吸引保持部46と、前記円板状板状物ユニットの前記円板状板状物の外周側面に作用する複数の爪30を待機位置と互いに半径方向に接近した作用位置との間で移動させることで、前記チャックテーブルの中心に位置付けする手段と、吸引保持部46を吸引保持位置とその上方の退避位置とに位置付ける吸引保持部位置付け手段18とを含む。
(もっと読む)
支持装置及び支持方法、並びに、シート剥離装置及び剥離方法、更に、シート貼付装置及び貼付方法
【課題】外縁部に切欠部を有する板状部材を吸引して支持し、その減圧状態から切欠部の位置を認識することのできる支持装置及び支持方法、切欠部を基準として板状部材に貼付された接着シートを剥離するシート剥離装置及び剥離方法、切欠部を基準として板状部材に接着シートを貼付するシート貼付装置及び貼付方法、を提供する。
【解決手段】板状部材WFを支持する支持面14を備えたテーブル16と、支持面14に設けられて板状部材WFの外縁部を吸引する吸引手段17を含む吸引手段19と、吸引手段17の減圧状態を検出する検出手段22とを含んで支持装置11が構成されている。この支持装置11の上方に剥離用テープPTを板状部材WFに貼付された接着シートASに貼付するシート保持手段12を設けてシート剥離装置が構成されている。シート保持手段12は、板状部材WFに設けられた切欠部20、21を基準として、剥離開始位置を決定し、当該剥離開始位置から接着シートを剥離するようになっている。
(もっと読む)
アーム型搬送装置
【課題】アーム型搬送装置とは別の場所に設置したアライナー等に逐一搬送対象物を搬送することなく、搬送対象物の中心位置を検出可能なアーム型搬送装置を提供する。
【解決手段】正円形搬送対象物Wを保持する第一のリンク21を回転軸C1を介して水平面内で回動可能となるようにベース部材たる第二のリンク22に取り付けたアーム機構2と、前記第二のリンク22に前記回転軸C1とともに取り付けられ、取り付け位置に応じて定まる検出位置Seに正円形搬送対象物Wのエッジが位置したことを検出するエッジ検出部3と、前記第二のリンク22に対する前記第一のリンク21の回転角度θを検出する回転角度検出部27と、正円形搬送対象物Wのエッジがエッジ検出部3を通過した際に回転角度検出部27で検出された対応する回転角度θに基づいて前記リンク21に対する正円形搬送対象物Wの中心位置を算出する中心位置算出部41とを具備して構成した。
(もっと読む)
位置決め機構
【課題】板状ワークを加工テーブルの中心に搬送する前に仮置き手段における板状ワークの位置合わせを容易に行う。
【解決手段】仮置き手段20は、仮置きテーブルベース21と少なくとも2つの側面支持部22,22aと板状ワーク3a,3bを仮置きする仮置きテーブル23とを備え、仮置きテーブルベース21は、該仮置きテーブルの中心から該2つの側面支持部を結ぶ線への垂線方向に下方に傾けられており、仮置きテーブル23には空気を吹き上げる吹上口24が形成され、吹上口24には空気を吹き上げる空気供給源26が接続され、板状ワーク3a,3bは、仮置きテーブル23の吹上口24から吹き上げられる空気によって浮上し、板状ワーク3a,3bの自重によって仮置きテーブルベース21の下方に移動し、板状ワーク3a,3bの側面が2つの側面支持部22,22aに接触し位置決めが完了する。
(もっと読む)
位置決め機構付ステージおよびその動作方法ならびに半導体装置の製造方法
【課題】半導体ウェハをステージ上に配置する際、確実に位置決め精度を向上させることができる技術を提供する。
【解決手段】本発明における位置決めガイドPAGがリング形状をしているため、半導体ウェハの外縁部全体にわたって位置決めガイドPAGで保持することができる。このことから、たとえ、半導体ウェハの外縁部の一部に割れやカケが存在していても、本発明における位置決めガイドPAGによれば、半導体ウェハを確実に保持することができる。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】 基板処理装置が備えるそれぞれの系への電力の供給を個別に制御することで、電力の消費量を低減する。
【解決手段】 処理室内に搬入された基板を処理する処理系と、処理室内に搬入された基板の処理位置を調整する処理室内搬送系と、少なくとも処理系及び処理室内搬送系に電力を供給する主電源と、処理系への電力供給路上に設けられた第1の開閉器と、処理室内搬送系への電力供給路上に設けられた第2の開閉器と、を備える。
(もっと読む)
基板保持部材および当該半導体保持部材への半導体基板の取り付け位置調整方法
【課題】部材の位置合わせに係る工程数を減少させ、位置合わせに要する時間を短縮し、半導体製造装置の生産性を向上させる。
【解決手段】基板保持部材1は、半導体基板11を保持する保持面を備えたベース2と少なくとも1つの開口部を有していて保持面と対向するようにベース2上に支持されたマスク9とを備えている。さらに、基板保持部材1は、保持面とマスク9との間に、半導体基板11が挿通される基板挿通部14を備えている。
(もっと読む)
リソグラフィ装置及びデバイスの製造方法
【課題】投影光学系と基板との衝突の低減に有利なリソグラフィ装置を提供する。
【解決手段】ステージに保持された基板の上の複数の計測点の高さを計測する計測部と、基板を保持して前記光学系の光軸に平行な方向に第1ストロークで移動する微動ステージと、微動ステージを保持して光学系の光軸に平行な方向に第1ストロークより大きい第2ストロークで移動する調整ステージと、調整ステージが移動しないように機械的に調整ステージを固定する固定機構と、を含み、制御部は、基板に前記パターンを転写する前に、計測部で計測された複数の計測点の高さで代表される基板の仮想平面が水平になるように、且つ、仮想平面が光学系の最も基板側の面と基板との間であって第1ストロークから決まる初期位置に位置するように調整ステージを移動させ、仮想平面を初期位置に位置させた後に固定機構によって調整ステージを固定するリソグラフィ装置。
(もっと読む)
搬送機構
【課題】被処理体の自重により被処理体を保持して搬送することが可能な搬送機構を提供する。
【解決手段】被処理体を搬送する搬送機構24、64において、屈伸及び旋回が可能になされたアーム部26、28、66、68と、アーム部の先端に設けられて処理体を保持するピック部30、32、70、72と、ピック部に設けられて被処理体の周縁部と当接して被処理体の自重により揺動して周縁部を保持する複数の保持部材34とを備える。これにより、被処理体の自重により被処理体を保持して搬送可能する。
(もっと読む)
ウエハリングのアライメント方法並びにアライメント機構
【課題】 加工エリアのステージ上での位置決め操作を短縮して作業時間の短縮を図ることができるウエハリングのアライメント機構と方法を提供する。
【解決手段】 カセットケース3の開口3aからウエハリング1を取り出して半導体ウエハWとともに加工エリアに搬送するときに用いるアライメント機構であって、カセットケース3からウエハリング1を引き出して加工エリアに搬送するロボットアーム4と、カセットケース3の開口3a近傍の左右側方で、カセットケース3から一部が引き出されたウエハリング1の左右の直線部1aに接触、離反可能に配置された左右のセンタリング部材7とを備え、ロボットアーム4は、ウエハリング1を着脱自在に把持するチャック5と、チャック5を解除した状態でウエハリング1を脱落しないように支えながらカセットケース3方向に押し込むための顎部6とを備えるようにする。
(もっと読む)
基板搬送装置、基板搬送方法および塗布装置
【課題】工程を増やすことなく、未処理基板を精度良くアライメント補正する。
【解決手段】本発明の基板搬送装置100は、待機位置(A点)に載置された一枚の未処理基板W1を、回転塗布ユニット20(B点)へ搬送するものである。この基板搬送装置は搬送フォーク40、シフト機構50、昇降機構60およびガス噴出機構70を有する。搬送フォーク40は未処理基板W1の裏面の両側縁部を支持する爪42を有する。爪42の上面に、未処理基板W1の角の搬送方向上流側に係合されるフック44が形成されている。シフト機構50は搬送フォーク40を搬送方向に可逆にシフトさせる。昇降機構60は搬送フォーク40を昇降させる。ガス噴出機構70は搬送フォーク40の上面から上方へガスを噴出させる。
(もっと読む)
接合装置
【課題】簡易な構成で、低背化あるいは小型化することができる接合装置を提供する。
【解決手段】加圧機構13と、加圧機構13から加圧力が付与され加圧力の作用方向に複数配置される熱盤部20と、加圧力の作用方向に隣接する熱盤部20同士が相互に積み重なることにより当該熱盤部20間に形成された真空チャンバCと、を有し、真空チャンバC内で貼り合せ用基材T同士を熱盤部20により熱圧着させて接合する接合装置10であって、加圧機構13は、加圧方向と平行に配置された2本の駆動軸14と、駆動軸14を介して熱盤部20に加圧力を付与する駆動源16と、を有し、貼り合せ用基材Tの接合中心部Zが2本の駆動軸14を結んだ線M上に位置することを特徴とする。
(もっと読む)
突き上げピンの位置補正方法
【課題】ダイシングレーンあるいはダイと、突き上げ痕の位置関係を画像処理によって認識することにより、突き上げピンの中心とダイの中心とのずれ量を算出して、突き上げピンを位置補正するようにした突き上げピンの位置補正方法を提供する。
【解決手段】ダイシングレーン44およびダイ部品Pの少なくとも一方と、突き上げピン45による突き上げによって粘着シート43に形成された突き上げ痕48とを撮像装置25により撮像して画像処理し、ダイシングレーンおよびダイの少なくとも一方と、突き上げ痕の位置関係を画像処理によって認識することにより、突き上げピンの中心とダイ部品の中心とのずれ量を算出し、該ずれ量に基づいてダイ部品に対する突き出しピンの突き上げ位置を補正するようにした。
(もっと読む)
ワーク搬送装置及びワーク加工装置
【課題】コンパクトな構成でワークを汚すことなく搬送することができるワーク搬送装置及びワーク加工装置を提供する。
【解決手段】移動可能な第1アーム60には、ウェーハ把持機構72と、第1吸着保持機構74とが備えられる。また、移動可能な第2アーム66には、トレイ76と位置決め機構78と、第2吸着保持機構80とが備えられる。カセットCに格納されたウェーハWは、縁部をウェーハ把持機構72に把持されてカセットCから引き出され、トレイ76の上に載置される。トレイ76に載置されたウェーハWは、位置決め機構78によって位置決めされた後、第1吸着保持機構74によって吸着保持されて、ワークテーブル30に搬送される。加工後、ウェーハWは第2吸着保持機構80に吸着保持されて、ワークテーブル30から回収され、ワーク洗浄装置56に搬送される。
(もっと読む)
基板処理装置
【課題】真空処理室に設けられる基板載置台の表面部の状態の確認や当該表面部の交換を行うことによる真空処理の停止時間を短くすると共に、前記表面部の状態を精度高く管理すること。
【解決手段】基板が搬送される常圧雰囲気の常圧搬送室と、常圧搬送室とロードロック室を介して接続される真空処理室と、前記真空処理室に設けられ、本体部と、当該本体部に対して着脱自在な表面部とを有する基板載置台と、前記ロードロック室または常圧搬送室に設けられ、前記表面部を収納するための保管部と、常圧搬送室からロードロック室を介して真空処理室へ基板を搬送し、また前記保管部と前記真空処理室の本体部との間で前記表面部を搬送するための搬送機構と、を備えるように基板処理装置を構成する。これによって真空処理室の大気開放を防ぐと共に表面部の状態の確認が容易になるので当該表面部を精度高く管理することができる。
(もっと読む)
ワークの中心位置合わせ装置
【課題】回転動作を停止させることなく回転動作中にワークの中心位置を回転軸の中心に合わせることが可能な位置合わせ装置を提供する。
【解決手段】ワークWを載せる載置台21と、載置台21の下側に配置され且つ載置台21を平面上で直交する2方向に移動させるXYステージ22と、XYステージ22を駆動させるX軸駆動部6,Y軸駆動部7と、XYステージ22を下方から回転可能に支持しXYステージ22の原点に一致する回転軸と、回転軸を回転駆動させる回転軸駆動部8と、ワークWのエッジ位置を検出するエッジ位置検出手段3とを備え、制御部4によって、回転軸を回転駆動させながらエッジ位置情報及び回転角度情報に基づきワークWの中心位置を回転軸の中心に一致させるために要するXYステージ22の移動量を算出し、移動量に基づいてX軸駆動部6又はY軸駆動部7の少なくとも何れか一方を作動させるようにした。
(もっと読む)
ティーチングシステム
【課題】従来技術によるティーチング方法では、位置を調整して、プロセスチャンバーを真空状態にして、位置のずれを顕微鏡で確認して、プロセスチャンバーを大気状態に戻して、また位置を調整する、という繰り返しを行うので、長い時間を必要とする上、気圧の変化を伴う作業は効率が悪い。さらに、顕微鏡を用いた作業者の目視による検査は、誤差が比較的大きい。
【解決手段】顕微鏡の代わりにCCDカメラ31を用い、ヒーターの基準位置に相当する第1の画像マーカーAを用い、シャドウリング18の中心位置の代わりに相当するアダプターリング調整治具17に設けられた第2の画像マーカーBを用いる。これら2つの画像マーカーAおよびBをCCDカメラ31にて測定し、アダプターリング調整治具17の位置を調整する。
(もっと読む)
1 - 20 / 291
[ Back to top ]