
Fターム[5F031LA16]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 動作機構等 (3,476) | 動力伝達機構 (1,599) | リンク、パンタグラフ機構 (84)
Fターム[5F031LA16]に分類される特許
21 - 40 / 84
基板保持機構、およびこの基板保持機構を備える基板処理装置
【課題】基板の搬送や、基板の回転を確実に行うことができる基板保持機構、およびこの基板保持機構を備える基板処理装置を提供すること。
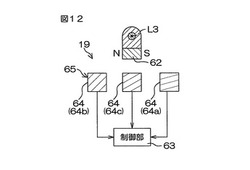
【解決手段】基板処理装置は、基板を保持して回転させるスピンチャックを備えている。スピンチャックは、開位置と閉位置との間で変位可能であり、開位置と閉位置との間の当接位置で基板の周端面に当接して当該基板を保持するための可動ピンと、可動ピンの変位量に応じた変位量で可動ピンと連動し、開位置および閉位置にそれぞれ対応する開検知位置および閉検知位置の間で変位する磁石62と、開検知位置と閉検知位置との間における磁石62の位置に応じて変化する磁界を検知するセンサ64と、センサ64の検出値に基づいて、開位置と閉位置との間における可動ピンの位置を検出する制御部63とを含む。
(もっと読む)
半導体ウエハの搬送装置及び搬送方法

【課題】半導体ウエハ垂れ下がりを防止して搬送することができるようにすること。
【解決手段】搬送装置10は、半導体ウエハWを保持する保持手段11と、この保持手段11を移動することで半導体ウエハWを搬送可能な移動手段12とを備えて構成されている。保持手段11は、半導体ウエハWを厚み方向に挟み込み可能な一対のトレイ15を介して当該半導体ウエハWを搬送可能に設けられている。
(もっと読む)
傾動装置
【課題】傾動台の中心を傾動中心とすることが可能であり、しかも傾装置を大型化させずに傾動台の傾動角度を大きくすることができる。
【解決手段】傾動装置1は、基台3に対して傾動台2を傾動可能に支持する傾動台支持部4と、基台3の上面3aに対して略平行となる方向に延在し、その延在方向に伸縮可能な一対の圧電素子5と、各圧電素子5の伸縮による第1の変位を自身の変形により基台3の上面3aに略直交する方向に拡大させるとともに、この拡大による第2の変位を傾動台2に伝えるV溝部66を有する変位拡大部材6とを備えている。傾動台支持部4は、支柱41と、支柱41に対して第1軸線を中心にして回転可能に支持された回動リングとを有し、傾動台2が回動リングに対して第2軸線を中心にして回転可能に支持される構成とした。
(もっと読む)
ロボットおよびロボットの電気エンドエフェクタに電気的に接続するシステム、装置、および方法
ロボット装置内で電気エンドエフェクタへの電気的接続を可能にするシステム、装置、および方法が開示される。一態様では、電気的結合は、真空チャンバ内で電気エンドエフェクタに電力を提供する。電気的結合は、係合する電気接点を含むことができる。いくつかの実施形態では、接点の少なくとも1つは、ロボットのアームの回転中に係合する接点が互いに対して回転しないように、ばねにつるすことができる。他の実施形態では、誘導結合されたコイルが含まれる。多数の他の態様が提供される。  (もっと読む)
(もっと読む)
スピンヘッドとこれを有する基板処理装置及び基板支持方法
【課題】基板を支持して基板を回転させるスピンヘッドとこれを有する基板処理装置及び基板支持方法を提供する。
【解決手段】スピンヘッドは、本体、本体上に設置されて基板を支持する支持位置と基板のローディング/アンローディングするための空間を提供する待機位置との間で移動する複数のチャックピン、及び複数のチャックピンを移動させるチャックピン移動ユニットを備える。チャックピン移動ユニットは、チャックピンが結合される回転ロッド、回転ロッドを本体に固定する軸ピン、及びチャックピンが支持位置から待機位置へ移動するように軸ピンを回転軸として回転ロッドを回転させる駆動部材を含む。回転ロッドは、本体が回転する時に逆遠心力によってチャックピンに待機位置から支持位置に向かう方向に力を加えるように提供される。複数のチャックピンは、第1ピンと第2ピンを有し、第1ピンと第2ピンは、工程進行の時に基板を交叉チャッキングする。
(もっと読む)
イオン注入装置
【課題】半導体ウェーハとチャックピンとの接触に起因するパーティクルの発生を抑制する。
【解決手段】本発明のイオン注入装置のチャック機構は、支持盤の半導体ウェーハ28が載置される面の反対側の面に、回転体の中心と半導体ウェーハの中心を結ぶ線(対称軸40)に軸対称に起立して設けられた支軸42と、支軸回りに回動可能かつ一端部が半導体ウェーハの内周側の周縁部より外側へ突出して設けられたリンク部材44と、リンク部材の一端部から半導体ウェーハの方向に起立して設けられたチャックピン46と、リンク部材を時計回りに回動させるチャックバネ48を備えている。リンク部材は、チャックバネによる回動を妨げる方向に回転体の回転に伴う遠心力を働かせるカウンタウェイト52が着脱可能になっており、カウンタウェイトの重量を異ならせてこの遠心力を調整可能になっている。
(もっと読む)
基板搬送装置
【課題】
基板の搬送方向の直進性に優れた基板搬送装置を提供する。
【解決手段】
基板搬送装置1は、補助回動ギア32と回動プーリ31とを連結するリンク部材33を備え、リンク部材33はリンク部材33の連結長(貫通孔33Aの中心P−貫通孔33Bの中心Qの間の長さ)を調整するためのリンク長さ調整部34とを備えている。このため、各部材の機械加工精度に依存して組立誤差が生じても、リンク部材33の長さ(連結長)を調整部34により調整して、補助回動ギア32の中心Oと回動プーリ31の中心Rとの間の長さと、連結長とを同じに調整できる。従って、リンク部材33により、回動プーリ31と補助回動ギア32との回動量つまり回動プーリ31と回動ギア30の回動量を一致させて、基板の搬送方向の直進性を向上させることができる。
(もっと読む)
水平多関節ロボット
【課題】水平多関節ロボットにおいて、高温基板搬送時の熱影響によるアームの姿勢変化を最小限に抑え、高精度な搬送を維持できるようにする。
【解決手段】ベルト111の張力を調整可能なテンション調整機構を有する水平多関節ロボットにおいて、テンション調整機構が、ベルト111に接触して張力を与えるアイドラ131と、アイドラ131を支持するとともにアームに対して第1支点119で回転可能に設けられたリンク118と、アームに対して第2支点117で回転可能に設けられ、リンク118の一部に接触するローラと、を備え、アームの温度上昇に伴って第1支点119と第2支点117とが離れると、リンク118がローラ117に接触しながら第1支点119で回転して張力を軽減するようにした。
(もっと読む)
基板の処理装置
【課題】減圧された処理容器の内部において、汚染を生じさせずに基板を搬送させる。
【解決手段】基板Gを処理する処理装置13であって、基板Gを収納する処理容器30と、処理容器30の内部を減圧させる減圧機構36と、処理容器30の内部に配置された、基板Gを保持するステージ41と、ステージ41を直進運動させる直進運動機構43と、ステージ41の回転を防止する平行リンク機構44、45を備え、処理容器30の内部の雰囲気と遮断された空間部100が、ステージ41の内部に形成され、空間部100と処理容器30の外部との雰囲気を連通させる通気経路110が、平行リンク機構44、45の内部に形成されている。
(もっと読む)
真空処理装置
【課題】コストを抑制することができ、制御が容易である真空処理装置を提供する。
【解決手段】内部が真空である真空部2と、該真空部2の内部に設けられ被処理体を載置することができる載置部3と、コイル415を具備し前記載置部3を前記真空部2の内部で移動させるためのリニアモータ4とを備え、前記載置部3は、その内部に前記真空部2と断絶した状態で大気が収容されており、前記リニアモータ4のコイル415は、前記載置部3の内部に配置されている。
(もっと読む)
真空装置、真空処理システムおよび真空室の圧力制御方法
【課題】 真空室に配備されたゲートバルブの作動用エアの供給が不足した場合でも、ゲートバルブが急激に開放されることを防止する。
【解決手段】 圧力制御機構201では、エアシリンダ123へ供給されるエアが停止すると、メカニカルバルブ121のポートが切り替わり、エアオペレートバルブ113が開放され、真空リーク用ポート109、気体導入配管111および連通孔107を介して真空状態の搬送室3内へ外部気体が少しずつ流入する。搬送室3の圧力制御は、逆止弁103およびバッファタンク105によってエアシリンダ47の作動用エアを確保した状態で行われるため、ゲートバルブ7bの急激な開放が防止される。
(もっと読む)
回転機構及び電子線描画装置
【課題】基板の中心を回転テーブルの回転中心に精度よく位置決めする。
【解決手段】基板トレイ40に形成された円形開口41a〜41cに、回転テーブル32に設けられた固定ロックピン50A,50C、及び移動ロックピン50Bが挿入した状態で、基板トレイ40を回転テーブル32に載置し、その後、回転テーブル32の移動ロックピン50Bを、半径方向に沿って、回転テーブル32の中心から離れる方向へ移動することで、基板トレイ40の円形開口41a〜41cが内接する円C1の中心を、回転テーブル32の回転中心に位置決めする。これにより、基板Wの中心を、回転中心に精度よく位置決めすることが可能となる。
(もっと読む)
テストハンドラーのバッファトレイピッチを調節する方法及び装置
【課題】半導体装置のテストのためのテストハンドターで半導体装置の移送速度を増加させることができるバッファトレイのピッチ調節方法を提供する。
【解決手段】半導体装置を収納するための多数対の単位バッファトレイを含むバッファトレイのピッチ調節方法において、単位バッファトレイ対間の第1ピッチは第1駆動部110によって調節され、単位バッファトレイの対内で第1単位バッファトレイと第2単位バッファトレイとの間の第2ピッチは第2駆動部140によって調節されることができる。半導体装置は、テストハンドラーのテストトレイとカストマートレイとの間でピッチが調節されたバッファトレイを経由して移送される。
(もっと読む)
密閉容器の蓋開閉システム及び当該システムを用いた基板処理方法
【課題】薄型のポッドを複数縦に積み上げる様式にてロード可能なFIMSシステムを提供する。
【解決手段】ポッドをロードする支持機構上の配置とFIMSと連通するミニエンバイロンメントとの間にトンネルを設け、FIMSドアによるポッドの蓋の保持した後のポッドからの蓋の分離が為される際のポッドの位置、蓋分離後にポッドが運ばれるウエハの挿脱可能な位置を当該トンネル内に配置することとし、ポッドから分離された蓋及びドアも当該トンネル内に付加された収容空間内に配置可能とする。
(もっと読む)
防塵機構を備えた基板搬送ロボット及びそれを備えた半導体製造装置
【課題】直動式アーム内にあるリニアスライダなどの機構からの発塵を抑制するとともに、真空中に置かれる基板搬送ロボットでも使用可能な防塵機構を提供すること
【解決手段】リニアスライダによって直動する直動式アーム3を備えて基板9を所望の位置に搬送する基板搬送ロボット1において、リニアスライダ18、23を摺動可能に保持するリニアレール7、8の近傍に、リニアスライダ18、23と微小な隙間を介して敷設され、ポリ塩化ビニール又はフッ素樹脂で製作された集塵カバ44をリニアレール7、8に沿って敷設した。リニアレール6上を摺動するリニアスライダ7直近に集塵カバ10を設置し、リニアレール6上のリニアスライダ7が摺動する際に飛散するパーティクル13を集塵カバ10のラビリンス形状部で収集し、アームカバ8の開口部からパーティクル13が流出することを防止し、ウエハ搬送フォーク3上のウエハ12にパーティクル13を付着させない処置をする。
(もっと読む)
基板搬送ロボット及びそれを備えた半導体製造装置
【課題】アームを直動式の構成とし、その回転駆動部であるモータをダイレクトドライブ方式とし、さらにそのモータの回転位置検出器を1回転以内での位置検出が可能なものを使用できるようにする。
【解決手段】多段の直動式アームを伸縮動作させる大プーリ16について、第2アームを直線状に駆動する連結プレートが第1ベルトの直線状部分におけるストローク量を移動しても第1ベルトによって回転する量が1回転未満となる直径を備えるように構成する。
(もっと読む)
基板処理装置および基板搬送装置
【課題】搬送室の大型化を回避することができ、しかも処理チャンバの基板搬送のための開口を広くすることなく、さらに機構部に過度の負担をかけることのない基板搬送装置およびそのような基板搬送装置を搭載した基板処理装置を提供すること。
【解決手段】基板搬送装置は、ガラス基板を支持した状態で処理チャンバ10内へ搬送するピック52と、ピック52を駆動する主駆動機構60とを有し、ピック52は、基部56bと、基部56bからフォーク状に延びる複数の第1支持部材56aと、第1支持部材56aに進出退避可能に接続された第2支持部材57aとを有し、これら第1支持部材56aと第2支持部材57aとで伸縮可能な支持部材を構成し、支持部材を伸ばした状態で基板が搬送される。
(もっと読む)
基板保持装置
【課題】レーザアニール処理装置などにおいて基板をステージに設置する際に、基板下面側に空気、ガスが巻き込まれるのを防止し、基板をステージから離脱させる際に帯電するのを防止する。
【解決手段】基板支持ステージ面20を貫通してステージ面に対し相対的に上下移動可能な基板支持プッシャが、面方向の異なる位置に複数設けられており、該基板保持プッシャは、ステージ面の内側に位置するものが、ステージ面のより外側に位置するものよりも保持高さが低く設定され、各基板支持プッシャは、相対的な保持高さを同じにしたままで連動して上下移動がなされる。構造が簡単で、基板をステージ面に設置する際にガスの巻き込みを防止でき、基板をステージ面から離脱させる際に帯電の発生を少なくする。
(もっと読む)
基板収納容器用蓋体及び基板収納容器
【課題】 蓋体の狭いスペースに施錠機構を設けることができ、しかも、蓋体用の開閉機構の複雑化防止を図ることのできる基板収納容器用蓋体及び基板収納容器を提供する。
【解決手段】 半導体ウェーハを整列収納する正面視略横長の容器本体と、容器本体の開口した正面を開閉する正面視略横長の蓋体30とを備え、蓋体30に、容器本体の正面に嵌合された際に施錠する施錠機構40を内蔵する。そして、施錠機構40を、蓋体30に支持され、容器本体の正面に蓋体30が嵌合された場合に容器本体の正面内周部両側に対向する一対の進退動係止体41と、容器本体の正面に蓋体30が嵌合された場合に容器本体の正面内周部両側に進退動係止体41を進出させてその先端部を干渉接触させる一対のコイルバネ47とから構成する。横長の蓋体30に小型の施錠機構40を横にして配置するので、狭い内蔵スペースに施錠機構40を適切に取付けることができる。
(もっと読む)
基板処理装置
【課題】スループットの向上が可能な基板処理装置を提供する。
【解決手段】基板処理装置100は、互いに並列に設けられたインデクサブロック10、第1の処理ブロック11および第2の処理ブロック12からなる。インデクサブロック10には、インデクサロボットIRが設けられている。第1の処理ブロック11には、複数の裏面洗浄ユニットSSRおよび第1のメインロボットMR1が設けられている。第2の処理ブロック12には、複数の端面洗浄ユニットSSB、複数の表面洗浄ユニットSSおよび第2のメインロボットMR2が設けられている。
(もっと読む)
21 - 40 / 84
[ Back to top ]