
Fターム[5H004GA17]の内容
フィードバック制御一般 (10,654) | 目的 (1,567) | ロバスト性向上 (49)
Fターム[5H004GA17]に分類される特許
1 - 20 / 49
駆動システム及び駆動方法、並びに露光装置及び露光方法
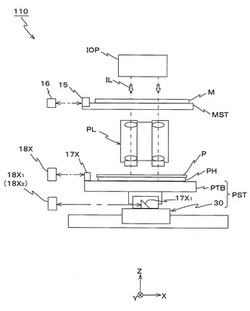
【課題】プレートステージを駆動する、高帯域でロバストな駆動システムを設計する。
【解決手段】 操作量に従って駆動されるプレートステージPSTの位置(第1制御量)X1を計測する干渉計18Xが設置されたプレートテーブルPTBが示す共振モードに対して逆相の共振モードを示すキャリッジ30に、プレートステージPSTの位置(第2制御量)X2を計測する干渉計18X1が設置される。干渉計18X及び干渉計18X1を用いることにより、プレートステージPSTの駆動する、高帯域でロバストな駆動システムを設計することが可能となる。
(もっと読む)
組み込み知能コントローラ、制御システム、制御プログラム、記録媒体、及び制御方法

【課題】インテリジェント・ロバスト制御を実現する組み込み知能コントローラを提供する。
【解決手段】
制御対象の目標軌道誤差の変化に適応的にゲインを可変調整する組み込み知能コントローラ1のICS部10を用いる。ICS部10は、ファジィ・ニューラルネットワークにより非線形誤差を減少させる補償器であるFB−FN部130(ファジィ・ニューラルネットワークによる非線形偏差補償器)を備える。FB−FN部130は、制御対象の非線形動特性のPD(比例、微分)補償を行うファジィPD部131と、制御対象の非線形動特性のPI(比例、積分)補償を行うファジィPI部132とを並列に備える。
(もっと読む)
制御系の評価装置およびその方法
【課題】 周波数特性に不確かさを有する制御対象を含む制御系の安定性を正確に評価する。
【解決手段】 特性データ取得部11は、制御器の周波数特性を取得する。変動データ取得部12は、制御対象のゲイン特性および位相差特性を取得する。伝達特性演算部13は、複素座標系において、ゲイン特性の変動範囲と位相差特性の変動範囲が重なる領域を制御対象の周波数特性の変動範囲として、周波数特性の変動範囲と制御器の周波数特性から制御系の一巡伝達特性とその変動範囲を演算する。評価部13は、一巡伝達特性とその変動範囲から制御系の安定性を評価する。
(もっと読む)
波動歯車装置を備えたアクチュエータの位置決め装置
【課題】スライディングモード制御により波動歯車装置の非線形特性を補償するアクチュエータの位置決め装置を提案すること。
【解決手段】位置決め装置のスライディングモード制御器は、位置指令θl*、制御対象を表す状態変数xを入力として制御対象への制御入力uを生成する。制御対象は次式で規定する。
スライディングモード制御系の切換面は設計変数Sで規定する。
制御入力uは、σを切換関数、kを切換ゲイン、として、線形状態フィードバック制御項ulと非線形制御入力項unlの和である。 (もっと読む)
(もっと読む)
直進型及び回転型ロボットの制御装置
【課題】高精度な位置決めが要求される工作機械等において、比較的単純な構造を保ちつつ、迅速かつ高精度な位置決めを実現する直進型及び回転型ロボットの制御装置を提供する。
【解決手段】H無限大制御理論に基づく制御系であって、制御器は数式的に以下の3つの部分に分かれる。1)モータの速度が定常誤差なく追従できるように設計された速度制御器。2)速度制御ループを含めたモータに対して設計されたH∞角度制御器。3)ゲイン可変のフィードフォーワード制御器。制御対象の伝達関数に積分要素が含まれた場合における適切な制御が可能となる。
(もっと読む)
ロバスト性マップからのプロセスコントローラのためのチューニングパラメータの決定方法
【課題】プロセス制御システム内のプロセスコントローラのための、チューニングパラメータの決定方法を提供する。
【解決手段】まず、プロセス制御ループの応答をシミュレートし、オーバーシュート、振動、応答時間等を表示(ステップ120)し、ロバスト特性を示す特性図としてのロバスト性マップを生成(ステップ130)し、プロット(ステップ132)する。ロバスト性マップがユーザに安定領域を示すために表示されるので、ユーザはロバスト性マップ上の安定領域内の点を選択する。このようにして、選択されたロバスト特性を有する制御ループを生成する新たなチューニングパラメータのセットが決定される(ステップ136)。さらに、これらの新たなチューニングパラメータを使用して制御ループをシミュレート(ステップ138)し、結果として得られる性能特性をユーザが見ることを可能とする。
(もっと読む)
制御器の構成方法、システム及びプログラム
【課題】スケジューリング・パラメータ・ベクトルの各候補について、制御器を自動的に構成するための技法を提供する。
【解決手段】プラントのLPVモデルを記述し、スケジューリング・パラメータ数を与え、複数の要素からなるスケジューリング・パラメータ・ベクトルの各要素には、制約条件の上位要求から出てくる最大値と最小値が与えられ、その各候補について、Min、Max、それらの中間値の各々の間について、νギャップを計算し、νギャップ間の差が大きいものから順番にスケジューリング・パラメータ候補とし、最初に与えられたパラメータ数を選び、LMIに変換し、選定したスケジューリング・パラメータの最大値と最小値に関する全ての組み合わせ端点についてH∞基準によって制御器を求め、パラメータ選定時に計算したνギャップによって重み付けした双一次補間によって一般化プラントへの制御器を構成する。
(もっと読む)
PID制御器の構成方法、プログラム及びシステム
【課題】プラントの事前情報が乏しく不安定系であっても、入力と出力が観測できれば準最適なロバストPID制御器を構成可能にする。
【解決手段】PID制御器の係数空間の中から、入出力データによって反証された組合せを除外して絞込みを行い、その係数候補群における各候補の評価関数履歴と全体での進化履歴の情報を共有させながら候補群を移動させ、同時に候補群近傍の係数空間探索を自動的に行いつつ、プラントと制御器の全体系におけるロバスト安定を実現する係数を非反証的に自動設計する機能を与える。各候補の評価関数履歴のうち最小となったPIDゲインと、候補群全体履歴のうち最小評価値になったPIDゲインの情報を記憶・共有しつつ、PSOにより、より良い中心を目指して候補群全体を移動させ、候補周辺探索と、その中からの反証候補除去を実行することで自動設計し、PSOによる候補群の各粒子の周辺探索候補に対しても非反証制御を行う。
(もっと読む)
プラントの制御装置及び火力発電プラントの制御装置
【課題】本発明の目的は、将来的に予測されるプラントの運転状態の変化をも考慮に入れた、プラントの環境負荷物質低減及び運転効率改善を実現する制御ロジックを自律学習する機能を具備させることで、プラントの運転条件変更に対してロバストな制御を提供する。
【解決手段】本発明のプラントの制御装置は、運転情報データベースと運転特性計算部の組み合わせ又は機器情報データベースと機器特性計算部の組み合わせのいずれか一つを含み、前記運転特性計算部、又は機器特性計算部が計算した特性値を用いてプラントの運用コストを評価するコスト評価部と、前記コスト評価部が出力するコスト評価値が最適となるようにプラントに与える制御信号の生成方法を自律学習する操作方法学習部とを備え、前記操作方法学習部は、前記コスト評価部が出力するコスト評価値を手掛かりに操作方法を学習するように構成する。
(もっと読む)
電動機制御装置
【課題】実操業時に速度パターンや負荷等が変動する場合にも、制御パラメータを常に最適値に調整可能として安定した制御応答が得られるような電動機制御装置を提供する。
【解決手段】電動機の状態量に関する加減速パターン等の指令パターンを出力する自動運転指令生成部4と、前記状態量をフィードバックして前記指令パターンに追従させるように制御する位置・速度調節部5と、前記状態量に基づいて調節部5における制御パラメータを変更する制御パラメータ操作部33と、を備え、電動機により負荷機械を駆動しながらパラメータ操作部33により制御パラメータを最適値に調整する電動機制御装置において、負荷機械の状態に応じて前記指令パターンを変化させる。
(もっと読む)
モデル予測制御においてフィードバック及びフィードフォワードを組み合わせるための方法及びシステム
【課題】非線形プラントにおけるモデルの不確実性の影響を最小化するために、フィードフォワード及びフィードバック制御を組み合わせる。
【解決手段】センサ信号プロセッサ140は、エンジン120上に配置された複数のセンサ110からの信号に基づいて、エンジンに関するパラメータ間の関係を決定して、エンジンと関連付けられているアクチュエータ130に対するフィードフォワード信号を算出し、モデルベース予測フィードバックコントローラ200に関する複数の制約条件をフィードフォワード信号の関数として処理するためのストラテジを提供する。アクチュエータ信号プロセッサ150は、アクチュエータに対する制御信号を、フィードバック信号及びフィードフォワード信号の総和として生成し、アクチュエータに送信する。制御信号に含まれるフィードバック信号が、外乱に関する不確実性の影響を最小化することができる。
(もっと読む)
除振システム、除振方法及びプログラム
【課題】多入力多出力を扱え、かつ非振動的な除振制御が可能であり、システム変動に頑強な制御を実現する。
【解決手段】搭載物が載置される定盤1を駆動する複数の駆動部3bに対応して配置された複数のセンサ3aにより、定盤1の状態量を計測する。次に、定盤1についての複数の状態量及び定盤1の運動方程式に基づいて、スライディングモード制御により、該当する駆動部3bに対する制御量を作成し、出力する。
またカルマンフィルタ9をさらに備え、制御部は、複数のセンサ3aのうち一部のセンサから取得した状態量をカルマンフィルタ9に入力し、カルマンフィルタ9で推定された他の状態量と一部のセンサから取得した状態量及び定盤1の運動方程式に基づいて、該当する駆動部に対する制御量を算出することが好適である。
(もっと読む)
フィードバック制御ゲインの設定方法及び設定支援プログラム
【課題】非反証制御の考え方をオフラインでの制御系設計に適用し、制御ゲインの最適値を計算によって求め得るようにして、設定の容易化を図るとともに、多入力多出力系にも適用可能な画期的な方法を提供する。
【解決手段】制御対象(プラント)Pにステップ入力等を加えたときの入出力応答データを少なくとも1つ採取する(ステップS1)。このデータに基づいて所定数以上の仮想の入出力応答データを生成し(S2,S3)、これらをそれぞれ反証演算式に代入してパラメータ空間に所定数以上の非反証領域を規定する(S4)。反証演算式を線形制約式とすることで、所定数以上の非反証領域の積集合の領域において制御ゲインの最適値を計算により求めることができ(S5)、多入力多出力系にも適用可能になる。
(もっと読む)
プラント運転支援システム
【課題】高精度にプラントの動作に追従するシミュレーションによって得られる推定値に基づきプラントの異常を検出すること。
【解決手段】実プラントの動作を現したプラントモデルを用いて実プラントの動作に追従するシミュレーションを行なうプラントシミュレータを用いたプラント運転支援システムにおいて、実プラントの実測値に基づき実プラントの状態をリアルタイムで再現するプラントシミュレータを用い、前記実プラントにおける実測値とプラントシミュレータによるシミュレーションによって得られた推定値とに基づき調整された調整パラメータの値があらかじめ定められた許容範囲内であるか否かを判定し、前記実プラントの運転状態の異常を検出することを特徴とするもの。
(もっと読む)
プロセスラインにおける制御モデル学習方法および装置、ならびに鋼板の製造方法
【課題】追従性の高い学習方式と耐ノイズ性の高い学習方式を併用することにより課題を解決する、プロセスラインにおける制御モデル学習方法および装置、ならびに鋼板の製造方法を提供することを目的とする。
【解決手段】プロセスラインでの実績値に基づいて制御モデルを修正して制御を行う学習制御方法において制御モデルの学習を行う、プロセスラインにおける制御モデル学習方法であって、実績値と制御モデル出力値との誤差に基づいて、追従性の高い学習方式と耐ノイズ性の高い学習方式とのそれぞれの出力に重みを付けて合成し、制御モデルに対する新たな学習値を算出する。
(もっと読む)
位置制御装置
【課題】加減速の小さい動作領域において、制御対象プラントが振動特性を有していても、外乱抑制性能の向上を達成する位置制御装置を提供する。
【解決手段】指令応答性能を重視したPI制御器とロバスト外乱抑制性能を重視したロバスト制御器を並列配置した速度制御器を構成し、加速度情報に基づいて、これらを切換えて制御する。切換え時におけるロバスト安定性の確保と円滑な切換え動作を実現するため、切換え時間を持った漸次切換えやトルク補償を行う。
(もっと読む)
プラントの制御装置
【課題】 制御対象の動特性変化の大きい場合、外乱が大きい場合、あるいは制御対象が非線形特性を有する場合において十分なロバスト性及び安定性を有するスライディングモード制御を行うことができるプラントの制御装置を提供する。
【解決手段】 スライディングモード制御器101、減算器102、及び周波数整形制御器103により、制御対象100への制御入力となる最終操作量UFMを算出する。減算器102、周波数整形制御器103、及び制御対象100からなるブロックを拡大制御対象110とし、拡大制御対象110の伝達関数FX(s)が所望の目標伝達関数F(s)となるように、周波数整形制御器103の伝達関数H(s)が設定される。CS角度CSAがCS角度指令値CSACMDと一致するようにフィードバック制御が行われる。
(もっと読む)
制御システム及びその調整方法
【課題】制御システムに迅速応答及び微小誤差となる時に、モータ等被制御体出力信号の超越量を減少すると共に調整の時間を減少させ、これにより制御システムの強健性を達成する。
【解決手段】被制御体により発生された出力信号を制御する制御システムを提供する。該制御システムは主制御ユニットと第1の調整ユニットと第2の調整ユニットとを備えてなり、第1の倍率及び第2の倍率の二つの重みパラメータの調整を介して制御システムの強健性、快速応答を達成すると共に、被制御体出力信号の超越量を消失又はゼロに接近させる。制御システムは目標周波数幅、低周波数干渉への抵抗及び伝達関数への追従の技術的特徴を具備し、主制御ユニット、第1の調整ユニット及び第2の調整ユニットの設計、及び第1の倍率と第2の倍率との二つの重みパラメータの調整により、実機整調の方式で上記の技術的特徴が達成される。
(もっと読む)
偏差量補償プログラム、偏差量補償装置、PID制御出力補償装置
【課題】応答性及びロバスト性の向上を容易にできる経済性に有利なPIDフィードバック制御システムを提供する。
【解決手段】図1に示すような、制御機能110、減算機能112、及び目標値設定機能114を備えたPIDフィードバック制御システムにおいて、前記目標値と前記制御量を取得して、前記制御量を、ランプ状に変化する前記目標値に追従させる追値制御中であるか否かを示す信号を出力する機能と制御量の微分に応じて出力する機能などにより偏差を調整する偏差補償プログラムを備える。
(もっと読む)
制御装置および方法、並びにプログラム
【課題】センサの故障に対してロバストな制御を可能にする。
【解決手段】予測部112は、学習したダイナミクスに基づいて、過去の複数のタイミングの高次元の修正データから、それより後のタイミングの高次元の入力データを予測した予測データを生成し、回帰部103は、予測データを回帰し、修正データ生成部101は、入力データと回帰された予測データとを合成して修正データを生成し、縮約部111は、高次元の修正データの次元を縮約して、入力データより低次元の、制御対象の動作を制御するための位相データを生成する。本発明は、例えばロボットやモータの制御に適用することができる。
(もっと読む)
1 - 20 / 49
[ Back to top ]