
Fターム[5H004HA12]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 振動、制震 (20)
Fターム[5H004HA12]に分類される特許
1 - 20 / 20
制振制御装置、制振制御方法およびコンピュータプログラム
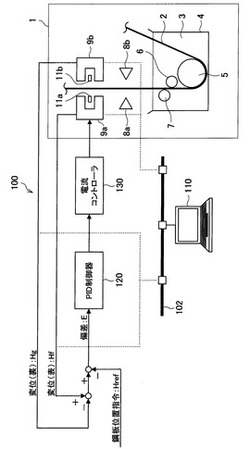
【課題】リアルタイムに最適な制御ゲインを同定し、操業中に最適なゲインを適用することが可能な制振制御装置を提供する。
【解決手段】連続的に搬送される帯状の金属板の、搬送方向に直交し、かつ板面に略垂直な方向の振動を抑制する制振装置を制御する制御器を有する本発明の制振制御装置は、制御器の制御ゲインを同定して変更する情報処理装置を備える。情報処理装置は、金属板の搬送方向と直交する方向の変位を検出する検出装置により検出された金属板の変位実績値と、制振装置の操作実績値とを取得するデータ取得部と、変位実績値および操作実績値に基づいて、制振装置の制御モデルを用いて制御器の制御ゲインを同定する制御ゲイン同定部と、同定された制御ゲインに基づいて、所定のタイミングで制御器の制御ゲインを変更する制御ゲイン変更部と、を備えることを特徴とする。
(もっと読む)
能動型振動騒音抑制装置

【課題】伝達系の温度が変化することにより実際の伝達関数が変化したとしても、適応制御に用いる伝達関数の推定値と実際の伝達関数とのずれを抑制することにより、高精度に振動や騒音を抑制できる能動型振動騒音抑制装置を提供する。
【解決手段】推定伝達関数記憶部160に、伝達系の温度Tを複数に区分した温度範囲毎に、伝達系の伝達関数の推定値Ghを記憶する。そして、フィルタ係数更新部170は、検出温度Tが含まれる温度範囲における伝達関数の推定値Ghと残留信号eとにより算出される更新値に基づいて、制御信号yの適応フィルタのフィルタ係数a、φを更新する。また、伝達関数同定処理部180は、検出温度Tがそれぞれの温度範囲に含まれる場合にそれぞれの伝達関数Gの同定処理を行い、算出されたそれぞれの伝達関数の推定値Ghを推定伝達関数記憶部160に記憶させる。
(もっと読む)
制振装置
【課題】適応フィルタの発散を抑制して制振制御の安定性を確保しながら伝達特性の位相成分を補正して制振精度を向上させた制振装置を提供する。
【解決手段】発散抑制モードにおいて、評価振動を構成する相殺振動(Vi4r+Vi4i)と所望の相殺振動Vi4iとの位相差βを低減して、適応フィルタ32fの算出が発散することが抑制される。そして、予め定めた伝達特性の位相成分を補正する場合に、位相成分の補正に起因して適応フィルタが発散するおそれのある通常モードから適応フィルタの発散を抑制する発散抑制モードに切り換えて、発散抑制モードにおいて位相成分の補正を実施するので、伝達特性を補正することによって補正後の伝達特性と現実の伝達特性との位相差が著しくかけ離れる場合であっても、適応フィルタの発散を抑制して制御の安定性を確保しながら伝達特性の位相成分を補正して制振精度を向上させることが可能となる。
(もっと読む)
電動アクチュエータ駆動装置及びこれを備えた制振装置
【課題】駆動指令信号が過大になることに対する対策を適正化した電動アクチュエータ駆動装置を提供する。
【解決手段】周期的信号たる電流指令I41の振幅及び位相に対応する振幅情報及び位相情報を有する指令ベクトルに基づいて電流指令I41を生成するものであり、指令ベクトルは互いに交わる複数のベクトルで表現され、指令ベクトルを表現する各ベクトルの大きさを示す適応フィルタ係数(Re、Im)をそれぞれ算出する係数算出手段44と、係数算出手段44により算出される各々の適応フィルタ係数(Re、Im)に基づいて電流指令I41を生成する指令信号生成手段45と、所定の条件が成立している場合に電流上限超過信号S41を生成して係数算出手段44に入力する電流超過検出手段4cとを有し、係数算出手段44は、電流上限超過信号S41が入力されている間、全ての適応フィルタ係数を電流指令I41が制限される方向に修正し、各適応フィルタ係数に対する修正の割合が全ての適応フィルタ係数で同一となるように抜き係数kを用いた。
(もっと読む)
PID制御装置及びPID制御方法
【課題】高速応答が求められる制御システムにおいて、PIDパラメータを自動設定する。
【解決手段】PID制御部11をP制御状態とし、目標値入力を一定とした状態で、オートチューニング部12はPID制御部11の比例ゲインKpを徐々に増大させる。Kpの増大に伴い、偏差に振動が発生する。FFT解析部13は偏差を周波数解析して振動の周波数を検出する。フィルタ14は偏差から振動周波数の成分を抽出しRMS処理部15に出力する。RMS処理部15は偏差の振動の1周期ごとに実効値を算出し、複数周期連続して増加していることを検出したときに、オートチューニング部12にトリガー信号を送出し、PID制御部11のKpの値を下げる。オートチューニング部12はトリガー信号を受信すると、そのときの比例ゲインKpc及び固有振動の周期TcからPIDパラメータを決定する。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動の著しい変化に起因して発生させる相殺振動を大きく変化させる必要がある場合に対応して制振制御の応答性を向上させた制振装置を提供する。
【解決手段】振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて加振手段2を通じて制振すべき位置に相殺振動Vi4を発生させ、制振すべき位置において振動Vi3と相殺振動Vi4との相殺誤差として残る振動を検出する。そして、相殺誤差として残る振動が小さくなるように適応フィルタ32fの算出を繰り返し実行し、算出の積み重ねにより疑似振動Vi3’及び適応フィルタ32fを真値へ収束させる。さらに、振動Vi3と疑似振動Vi3’に基づき制振すべき位置に発生される相殺振動Vi4との偏差に対応する偏差情報を取得し、取得した偏差情報に基づいて偏差の増加に応じて適応フィルタ32fが収束する速度が速まるように収束係数32uを変更する。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動の周波数を実際の周波数と異なる周波数であると誤認識した場合であっても疑似振動の周波数を制振すべき振動の周波数に合わせて適応制御アルゴリズムの適応性を向上させ、制振性および安定性を向上させた制振装置を提供する。
【解決手段】適応制御アルゴリズムを用いて振動発生源gnから制振すべき位置へ伝達した振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて加振手段2を通じて制振すべき位置に相殺振動Vi4を発生させ、発生した相殺振動Vi4と振動Vi3との相殺誤差として残る振動を検出する。そして、相殺誤差として残る振動の位相と相殺振動Vi4の位相との位相差に基づいて周波数認識手段31により認識された周波数を位相差が無くなる方向へ補正する周波数補正手段35とを有している。
(もっと読む)
制振装置及びこれを備えた車両
【課題】制振すべき振動と基準波との間の位相ズレを低減して、適応フィルタの算出時における制振安定性を向上させるとともに、制御の応答性や制振効果を向上させた制振装置を提供する。
【解決手段】適応フィルタ32fを用いて振動発生源gnから制振すべき位置へ伝達した振動Vi3を相殺するために必要な疑似振動Vi3’の算出値に基づいて相殺振動Vi4を制振すべき位置に発生させる指令たる相殺信号を生成する。そして、振動Vi3と相殺振動Vi4との相殺誤差として検出された振動と適応フィルタ32fの基準波とに基づいて相殺誤差として残る振動が小さくなるように適応フィルタ32fの算出を繰り返し実行し、算出の積み重ねにより疑似振動Vi3’及び適応フィルタ32fを真値へ収束させる。さらに、相殺誤差として残る振動の位相と相殺振動Vi4の位相との位相差に基づいて適応フィルタ32fの基準波の位相を補正する。
(もっと読む)
制御ロジック及びフィードバック制御方式
【課題】幅広い振動数帯域において振動低減効果を有する制御ロジック及びフィードバック制御方式を提供する。
【解決手段】畳み込み積分を含みフィルタ係数を更新する制御ロジックにおいて、入力信号として、エラー信号のみを用い、フィルタ係数の更新式を次式
【数1】
のようにして制御を行うことで、幅広い周波数領域で伝達力あるいは振動あるいは騒音を低減する。前記制御ロジックによりフィードバックゲインをサンプリング時間ごとに修正することで、幅広い周波数領域で伝達力あるいは振動あるいは騒音を低減する。
(もっと読む)
アクティブフィードバック制御装置、方法、及びプログラム
【課題】制御性能を低下させることなく、同定対象の動特性を表わすパラメータを同定対象の動作中にオンライン同定する。
【解決手段】アクティブフィードバック制御装置28は、外乱が入力される制御対象12、制御対象12を駆動するアクチュエータ14、制御対象12の状態を検出するセンサ16を含む同定対象18の動特性を表わすパラメータと、センサ16からの検出信号と、に基づいて、制御対象12が目標の状態となるような制御信号を生成して出力するコントローラ20と、平均値が略ゼロとなる乱数を発生させる乱数発生部22と、コントローラ20から出力された制御信号と、発生させた乱数を制御信号に乗算したノイズ付加制御信号と、を加算してアクチュエータ14に出力する加算部24と、同定対象18の動特性を表わすパラメータを制御対象12の動作中にオンライン同定し、同定したパラメータをコントローラ20に出力する同定部26と、を備える。
(もっと読む)
除振システム、除振方法及びプログラム
【課題】多入力多出力を扱え、かつ非振動的な除振制御が可能であり、システム変動に頑強な制御を実現する。
【解決手段】搭載物が載置される定盤1を駆動する複数の駆動部3bに対応して配置された複数のセンサ3aにより、定盤1の状態量を計測する。次に、定盤1についての複数の状態量及び定盤1の運動方程式に基づいて、スライディングモード制御により、該当する駆動部3bに対する制御量を作成し、出力する。
またカルマンフィルタ9をさらに備え、制御部は、複数のセンサ3aのうち一部のセンサから取得した状態量をカルマンフィルタ9に入力し、カルマンフィルタ9で推定された他の状態量と一部のセンサから取得した状態量及び定盤1の運動方程式に基づいて、該当する駆動部に対する制御量を算出することが好適である。
(もっと読む)
搬送用制振制御システムのフィ−ドバックコントロ−ラ
【課題】搬送時に搬送物に生じる振動を防止し、かつ制御系の設計及びコントロ−ラの導出も平易な搬送用制振制御システムのフィ−ドバックコントロ−ラを提供する。
【解決手段】 フィ−ドバックコントロ−ラの形を、少なくともノッチフィルタ若しくはロ−パスフィルタを有する周波数制御要素と位置制御要素の組み合わせに限定し、そのフィ−ドバックコントロ−ラの要素の値を最適に与えるために、設計仕様を周波数仕様と時間仕様の両方で与える。
(もっと読む)
能動型防振適応制御装置
【課題】安定領域を算出する際に近似式ではなく適応制御アルゴリズムに用いる関数そのものを用いることができる適応制御アルゴリズムによる能動型防振適応制御装置を提供する。
【解決手段】誤差信号e(t)などを用いて、正弦成分と余弦成分の相関を利用して、防振対象振動の推定未知関数dh(t)の振幅ahおよび位相φhを算出する。算出された防振対象振動の推定未知関数dh(t)の振幅ahおよびφh、および、伝達関数の推定値Gh(s)に基づき、制御信号u(t)の振幅Ahおよび位相Φhを算出し、且つ、制御信号u(t)の振幅Ahおよび位相Φhを更新する。
(もっと読む)
物理的システムにおいて入力信号を発生する方法及び装置
【課題】振動システムのための駆動信号を獲得する前述のシステム及び方法はほぼ成功を享受したにも拘わらず、そのようなシステムを改善するための継続した必要性が存在する。特に、物理的システムのモデル、及び駆動信号を獲得するための反復的プロセスを改善する。
【解決手段】入力に応答して選択された出力を生成するよう物理的システム(10)を制御する方法及び装置は、入力を受け取り実際の出力を与える物理的システムを含む仮想同一性システムを定義することを備える。仮想同一性システムの同一性の質は、少なくとも実際の出力の関数を用いてチェックされる。好適な実施形態において、正しい入力をより効率的かつ正確に与えるため、調整が物理的システムのモデルに対して同一性の質の関数として行われる。
(もっと読む)
振動機に油圧流体を供給する油圧ユニットのためのサーボ制御システム
【課題】振動機のエネルギー消費を抑制する。
【解決手段】油圧システム7のためのサーボ制御システムは,油圧流体を受ける少なくとも一つの油圧モータによって回転駆動される偏心ウエイトを含む振動機1又は振動システムに,前記流体を供給する,モータ9により駆動されるポンプ8を含む。振動機1により実際に消費されているエネルギーに関連する,油圧ユニット7のモータ9の回転速度の連続的な適応のための適応手段をさらに含む。
(もっと読む)
気体バネ式除振装置及び該装置の制御方法
【課題】流量制御型弁を用いて排気流量を抑制するという長所を維持しつつ、従来よりも応答性の高い高精度な制御が可能な気体バネ式除振装置及びその制御方法を提供する。
【解決手段】スプール弁及び圧力微分計を備えた除振装置において、スプール弁の不感帯での動特性を向上させるために、圧力微分値のフィードバック値が、入力電圧と出力流量との関係がゼロ点を通る線形性を備えた規範モデルGrefに追従するような制御を行い、スプール弁の非線形性を補償する。
(もっと読む)
振動検出装置
【課題】電動機位置の振幅を用いて機台に検出器を付けることなく前記機台の振動を検出できる振動検出装置を提供する。
【解決手段】位置を入力し位置振幅を出力する位置振幅検出器101と、前記位置振幅を入力し機台振動トルク振幅を出力する機台振動トルク振幅検出器102と、前記機台振動トルク振幅を入力し機台支配モード固有周波数を検出し出力する共振周波数検出器103を備える。
(もっと読む)
能動型防振装置
【課題】低コスト化を図りつつ確実に加振器17の不動作異常を検出することができる能動型防振装置1を提供する。
【解決手段】能動型防振装置1は、車両特定部位の振動を能動的に抑制させるように適応制御法により少なくともフィルタ係数ゲインaを更新して、フィルタ係数ゲインaを用いた周期性制御信号yを生成する適応制御部15を備える。さらに、適応制御部15を非制御状態から制御状態へ切り替えた場合に、適応制御部15により更新されるフィルタ係数ゲインaの変化率に基づき、加振器17の不動作異常を判定する異常判定部193を備える。そして、フィルタ係数ゲインaの変化率が連続的に小さくなっている場合には、加振器17は正常と判断し、連続的に小さくなっていない場合には、加振器17は不動作異常と判定する。
(もっと読む)
アクティブ振動制御装置
【課題】音や物体の振動を低減する際、追従性のよいアクティブ振動制御装置を提供すること。
【解決手段】参照位置で振動を受信する参照受信装置と、観測位置で振動を受信する観測受信装置と、観測位置に伝播した振動を低減するための振動を発生する振動発生装置と、参照受信装置で受信した振動に基づく信号をフィルタリングし、振動発生装置に信号を出力する適応フィルタと、単一適応ステップサイズアルゴリズムを演算するアルゴリズム演算装置とを備え、参照受信装置で受信した振動に基づく信号と観測受信装置で受信した振動に基づく信号との積を求め、この積を核の項としてステップサイズパラメータの更新則変数を再起的に求め、2個のステップサイズパラメータの更新則変数の積を核の項として単一適応ステップサイズアルゴリズムのステップサイズパラメータを再帰的に求め、適応フィルタを単一適応ステップサイズアルゴリズムで制御する。
(もっと読む)
電動機制御システムの自律設計方法
【課題】 機台振動を有する制御対象に対する位置指令と補償器のチューニング作業の時間を短縮する。
【解決手段】 電動機で駆動される装置を搭載した機台の振動を有する制御対象に対し、前記電動機の回転位置又は前記装置の可動部の位置に関する位置情報を用いて位置決め制御系を構成した電動機制御システムの自律設計方法において、前記可動部の特定の移動距離もしくは複数の移動距離に対して、(1)位置決め仕様を満足し、(2)機台振動抑制に関する制御目標を考慮し、(3)動作上の安全性を考慮し、(4)フィードバック補償器の安定性を確保したフィードフォワード補償器とフィードバック補償器と位置指令パラメータを最適化手法を用いて自律設計する。最適化手法として遺伝アルゴリズムを用いる。フイードバック補償器パラメータの探索範囲には、初期設定された又は出荷後に設定された安定化補償器パラメータが含まれるように設定する。
(もっと読む)
1 - 20 / 20
[ Back to top ]