
Fターム[5H004HA14]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 電気的変量 (55)
Fターム[5H004HA14]に分類される特許
1 - 20 / 55
シミュレーションシステム、シミュレーション実行方法およびプログラム
機器相互間の省エネ装置
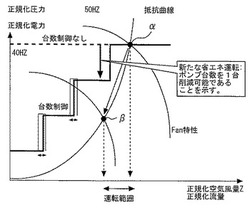
【課題】異なる工業単位のエネルギーを扱う複数機器を共通評価基準にて省エネ評価でき、設備全体としての省エネを図ることのできる機器相互間の省エネ装置を提供する。
【解決手段】それぞれ異なる工業次元のエネルギーを設備に供給する複数の機器を備える。前記複数の機器それぞれに関し、運転量とその運転量に応じて設備に供給するエネルギー量との関係を定めた運転特性について定格を1として正規化し、正規化された運転特性を重畳し、機器相互間の関係を表す重畳正規化データを求める。前記重畳正規化データに基づいて、前記複数の機器のうち1の機器について省エネ制御を実施した場合に他の機器に与える相互干渉度を、最適化手法により計測・分析する。前記相互干渉度に基づいて、前記設備全体としての大局的な最適解を算出する。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法

【課題】ステップ応答制御においてエネルギー使用量が一定値を大幅に超えないように、かつ設定値への追従特性が損なわれないようにする。
【解決手段】電力総和抑制制御装置は、各制御ループの操作量を特定の値にした場合の昇温時間を推定する昇温時間推定部(12)と、各制御ループの制御量を昇温時間の間に設定値変更に応じた量だけ変化させるのに必要な出力を推定し、この必要出力から各制御アクチュエータの使用電力の総和である使用電力総量を算出し、割当総電力に対する使用電力総量の達成率と最大限度時間に対する昇温時間の確保率とのバランスを表す重み付け評価関数の評価値を最適にする必要出力の組み合わせを探索して、最終的に得られた必要出力を各制御ループの操作量出力上限値として設定する電力抑制部(16〜19)と、制御ループ毎に設けられた制御部(22−i)とを備える。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】ステップ応答制御においてエネルギー使用量が一定値を大幅に超えないように、かつ設定値への追従特性が損なわれないようにする。
【解決手段】電力総和抑制制御装置は、各制御ループの操作量を特定の値にした場合の昇温時間を推定する昇温時間推定部(12)と、各制御ループの制御量を昇温時間の間に設定値変更に応じた量だけ変化させるのに必要な出力を推定し、使用電力総量が割当総電力を超えない必要出力を各制御ループの操作量出力上限値とする電力抑制部(16〜18)と、昇温時間が最大限度時間以内でない場合に、各制御ループの必要出力を、各制御ループの制御量を最大限度時間の間に設定値変更に応じた量だけ変化させるのに必要な操作量として計算し直し、この必要出力を各制御ループの操作量出力上限値として再設定する補正設定部(21)と、制御部(23−i)とを備える。
(もっと読む)
ドライブ装置の調整装置
【課題】調整値の変更前後における出力波形の差異を容易に把握することができ、出力波形の比較にかかる手間を低減できるドライブ装置の調整装置を提供する。
【解決手段】ドライブ装置の調整装置において、テストバイアスにテストステップを加えた入力を調整対象であるドライブ装置に与えて出力されたフィードバック波形を採取する波形データ採取部と、前記採取されたフィードバック波形のデータを、前記採取された順序で保持する波形キューと、フィードバック波形が前記採取された時に調整対象に設定されている調整値の情報を、前記採取された順序で保持する調整値キューと、テストステップ波形及び波形キューのフィードバック波形を、重ね合わせ、かつ、それぞれ区別可能に表示可能であるとともに、調整値キューの調整値の情報を、フィードバック波形のそれぞれと対応させて表示可能である表示部と、を備える。
(もっと読む)
制御装置
【課題】外乱成分による制御信号の変動を抑制できるとともに、当該制御信号の変動抑制によるフィードバック制御系の応答特性の変動を抑制できる制御装置が求められる。
【解決手段】制御対象の出力が目標値に近づくように制御信号を変化させるフィードバック制御部を備えた制御装置であって、目標値に対して目標値応答予測部の処理を行って第一演算値を算出し、出力に対してノイズ除去フィルタ処理を行って第二演算値を算出し、目標値に対して目標値応答予測部及びノイズ除去フィルタの処理を行って第三演算値を算出し、第二演算値に第一演算値を加算し第三演算値を減算した制御用出力値を算出する処理と数学的に等価な処理を行い、制御用出力値を制御対象の出力として前記フィードバック制御部に入力する制御装置。
(もっと読む)
電磁比例弁駆動回路
【課題】電磁比例弁に供給された実際の駆動電流が目標駆動電流に対して追従性を良くする。
【解決手段】電磁比例弁駆動回路3は出力トランジスタとなる第1のトランジスタ13及びフライホイールダイオード15に加えて、第2のトランジスタ17、電圧保持用コンデンサ19及びクランプダイオード21を備える。第2のトランジスタ17はエミッタEがフライホイールダイオード15に接続され、コレクタCが接地され、ベースBが電磁比例弁1に接続されている。電磁比例弁1に供給したい目標駆動電流(目標電圧Vt)を減少させる場合において、目標電圧Vtが予め定められた値より大きい段階では、第1のトランジスタ13のオフ時に第2のトランジスタ17をオンさせ、目標電圧Vtが予め定められた値より小さい段階では、第1のトランジスタ13のオフ時に第2のトランジスタ17をオフさせる。
(もっと読む)
障害を弱めるための方法
【課題】障害が識別されるだけではなく、有効信号に対する影響ができる限り小さくなるように障害を弱め且つ最少化し、障害を受けていない有効信号のダイナミクスができるだけ維持されるように拡張する、直接制御量の障害を弱めるための方法を提供する。
【解決手段】操作量が有効信号であるときに、閉制御回路内の直接制御量の障害を弱めるための方法において、直接制御量がそれぞれ相連続する二つの走査時点で連続的に測定され、直接制御量の値が差し引かれ、この差の大きさが予め定められている基準値だけずれている場合に、少なくとも一つの制御パラメータが、障害に対する操作量の反応が最少化されるように変化される。
(もっと読む)
制御システム
【課題】遺伝的アルゴリズムを利用して最適な制御値を求めることができる制御システムを提供することを課題とする。
【解決手段】制御対象システムを制御するための制御値を出力する制御システムであって、制御対象システムに対する最適な制御値を生成する最適制御装置を有し、最適制御装置は、遺伝的アルゴリズムを実施した回数が設定された実施回数になるまで、遺伝的アルゴリズムを実施する毎に初期個体を発生し、その発生した初期個体を用いて遺伝的アルゴリズムを実施して適応度の高い個体を探索し、遺伝的アルゴリズムを実施した回数が実施回数になった場合、その実施回数分の遺伝的アルゴリズムでそれぞれ探索された個体の中から最も適応度の高い個体を選択し、その選択した個体に基づいて制御対象システムに出力する制御値を生成することを特徴とする。
(もっと読む)
発電プラントおよび発電プラント制御装置
【課題】蒸気タービン回転数の変動に基づいてガバナ弁を制御する制御機能の試験を的確に安全に行なう。
【解決手段】発電プラント制御装置は、ガバナ弁位置指令信号14を出力するボイラ・タービン協調制御部40と、調整信号21とガバナ弁位置指令信号14とを加算してガバナ弁指令信号22を出力するガバナ制御部41と、を有する。ガバナ制御部41は、定格周波数と蒸気タービンの回転数の実測データとを比較して偏差信号18を出力する減算器17と、偏差信号18に模擬試験信号を加算して調整基礎信号43を出力する試験信号加算部42と、調整基礎信号43に比例処理を行なって調整信号21を出力する比例器20と、調整信号21にガバナ弁位置指令信号14を加算してガバナ弁指令信号22を出力する協調制御加算器23と、を具備する。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】複数の制御系に関し、定常状態においてエネルギー使用量が指定された一定値を超えないように、かつ外乱抑制特性が可能な限り損なわれないように、制御を行う。
【解決手段】電力総和抑制制御装置は、複数の制御ループのヒータの電力使用量を規定する割当総電力の情報を受信する割当総電力入力部(10)と、各制御ループの消費電力値を取得する電力値取得部(11)と、消費電力値から各制御ループの電力余裕を算出し、電力余裕の総和に対する各制御ループの電力余裕の比率と割当総電力に基づいて各制御ループの操作量出力上限値を算出する電力抑制部(12〜18)と、制御ループ毎に設けられ、操作量を算出し、操作量の上限処理を実行して上限処理後の操作量を対応する制御ループのヒータに出力する制御部(19−i)とを備える。
(もっと読む)
制御システム、制御装置、および制御方法
【課題】個別VQC方式を用いた電力系統の電圧値が運用制約範囲の上限および下限の少なくとも一方を超えることを低減する。
【解決手段】個別VQC装置401は、検出された500kV母線101の電圧値を用いて、電力系統10における目的関数の最適解を決定する。個別VQC装置401は、最適解を用いて個別電圧無効電力制御を行なう。個別VQC装置401は、通信インターフェイスを用いて最適解を全系VQC装置301に送信する。目的関数は、電力系統10における電圧に関する運用制約の範囲内の中間値に対する、最適解の解候補に応じた電力系統10の電圧値についての偏差を示した項を加算項として含む。
(もっと読む)
制御装置、および制御方法
【課題】少ない探索回数で大域的な準最適解を探索可能とする情報処理装置を提供する。
【解決手段】CPUは、PSOによる目的関数の解候補の探索をn回行ない、TSによる目的関数の解候補の探索をn回行なう。TSによる探索においては、PSOによるj回目の探索で得られた解候補およびTSによるj回目の探索で得られた解候補のうちから目的関数の値が最小となる解候補を1つ選択し、当該選択した解候補をj回目の解としてTSによるj+1回目の探索を実行する。CPUは、初期解と、PSOによる少なくともn回の探索で得られた解候補およびTSによるn回の探索で得られた解候補のうち、目的関数の値が最大または最小のうち予め定められた一方となる解候補を、目的関数における準最適解とする。CPUは、準最適解に基づく指令を、通信インターフェイスを用いて制御対象に送信する。
(もっと読む)
PWM制御により双方向サーボアクチュエータを制御するためのシステム、方法、及び装置
【課題】タービンに多数の弁がある場合、タービンのサーボコントローラは、極めてかさばったものとなる可能性があるとともに、駆動エネルギーが線形駆動回路を通じて熱に変換される場合には、エネルギー効率が低下し、制御盤の全体的な温度を上げるのを解決する。
【解決手段】方向制御信号を受信するステップと、少なくとも方向制御信号に基づいてアクチュエータを通るスイッチング可能な正電流経路及びスイッチング可能な負電流経路を確立するようにデバイスを操作するステップと、アクチュエータに関連付けられた電流に少なくとも基づいてフィードバックを送るステップと、そのフィードバックに少なくとも基づいて電流を制御するステップとを含むことができる。この方法は、パルス幅変調制御を介してアクチュエータを通る少なくとも1つの正電流経路及び少なくとも1つの負電流経路を確立するように1つ又は複数のデバイスを操作するステップを含む。
(もっと読む)
ゆらぎ信号発生装置、ゆらぎ信号発生方法、及びゆらぎ信号発生プログラム
【課題】様々な傾きを有したゆらぎを発生させるとともに、人の要求する山場(ピーク)位置もある程度設定できるゆらぎ信号発生装置を提供する。
【解決手段】ゆらぎ信号発生装置10は、パワー密度を算出する関数とパワー密度を算出する関数のパラメータを入力する入力部11と、入力部によって入力されたパラメータとパワー密度を算出する関数に基づいて、各周波数のパワー密度を算出するパワー密度算出部12と、パワー密度算出部によって算出された各周波数のパワー密度を正弦波成分と余弦波成分に分けるパワー密度分割部13と、パワー密度分割部によって分割された成分に基づいて逆フーリエ変換により時系列データを生成する時系列データ生成部14と、時系列データに基づいて出力データを生成し出力するデータ出力部15と、を備えた。
(もっと読む)
プログラム、記録媒体、サーボモータの制御パラメータ調整方法、開発支援装置、サーボシステムの開発システム
【課題】サーボモータを制御するサーボドライバのパラメータを容易に調整可能な技術を提供する。
【解決手段】ユーザは、自身の利用する装置を開発支援装置の画面上で選択する。選択された装置(機械構成)と剛性値とが関連付けられる。さらに剛性値とサーボドライバの制御パラメータとが対応付けられる。完了条件を満たすように、制御パラメータが自動的に調整される。したがって、ユーザが自身の利用する装置を選択するだけで、サーボドライバのパラメータを自動的に調整することができる。
(もっと読む)
被処理物の熱処理装置
【課題】 制御の追従性と定常特性の向上を図ることができる被処理物の熱処理装置を提供する。
【解決手段】 被処理物を熱処理する熱処理炉4と、熱処理炉を制御するための複数の設定値と複数の制御部選択信号を出力するシーケンサ10と、熱処理炉の複数の制御量を制御するために構成されている複数の制御系ループとを備え、各制御系ループに、前記シーケンサからの設定値と前記熱処理炉からの制御量とに基づいて操作量を出力する複数の制御部と、複数の制御部から出力される操作量のうち1つをシーケンサ10からの制御部選択信号に従って選択して熱処理炉4に出力する切替器3−1,3−2,3−3とをそれぞれ備えた被処理物の熱処理装置において、シーケンサ10は、複数の制御系ループの制御構成の切替をそれぞれ独立して行うための手段を有する。
(もっと読む)
産業プラントの運転制御システム
【課題】生産量の急変や製品種の変更に対して、その時点で精度の高い需要用役量予測を行い、その予測によって無駄なく必要な用役を供給し、省エネとCO2削減を行うことを目的とする。
【解決手段】生産設備に必要な用役を供給する用役設備を制御するための指令値を作成するプラント運転監視制御システムにおいて、生産設備で生産される被生産物に与えられるべき時間経過に対する物性値を定めた製造処方と、被生産物の生産開始時刻、生産終了時刻生産量および生産開始時刻から生産終了時刻の間に生産される被生産物の生産量を定めた生産計画に基づいて、時刻経過に対して被生産物を生産するにあたり必要十分な用役の需要量を示した用役需要量パターンを生成する。このように得られた用役需要量パターンを用いて、用役設備に対する指令値を算出し用役設備を制御することを特徴とする。
(もっと読む)
学習歩行ロボット装置及びその制御プログラム
【課題】床面の状態が大きく異なりあるいは大きく変化するような領域でも安定した移動を可能とする学習歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】所定領域内のそれぞれの位置における床面の硬さ指標を測定する手段21と、それぞれの位置を表す位置情報と硬さ指標とを対応付けて硬さ情報として保存する手段41と、所定領域内の学習歩行ロボット装置の現在位置を同定する手段35と、同定された現在位置における床面の硬さ指標を硬さ情報から決定する手段36と、決定した床面の硬さ指標に基づいて歩行形態を選択して歩行動作を制御する手段22〜28とを有し、手段21は、学習歩行ロボット装置が直立した姿勢を保持したまま足首の関節ロール軸アクチュエータを駆動したときのアクチュエータに流れる電流値に基づいて、アクチュエータに流れる電流値が大きいほど床面が硬いとする硬さ指標を対応付ける。
(もっと読む)
電気エネルギーを生成する風力発電機を制御する方法
1 - 20 / 55
[ Back to top ]