
Fターム[5H004JB09]の内容
フィードバック制御一般 (10,654) | 検出部(オブザーバを含む) (399) | 複数の検出器を持つもの (47) | 異種の制御量を検出するもの (21)
Fターム[5H004JB09]に分類される特許
1 - 20 / 21
センサ情報の統合方法と装置
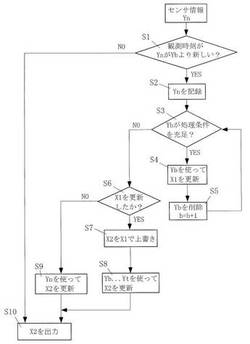
【課題】誤差と計算量を増大させずに複数のセンサ情報を統合することができる方法と装置を提供する。
【解決手段】新たに受信したセンサ情報Ynを、観測時刻の順に記録し、各センサ情報に対し、第1条件を満たすか否かを判定する(S3)。第1条件は、「そのセンサ情報の観測時刻と同じかそれよりも新しいセンサ情報がすべてのセンサから受信されていること」である。第1条件を満たす場合に、第1条件を満たす各センサ情報6を観測時刻順に用いて、内部状態を予測し、第1推定値X1を予測した内部状態に更新して記憶し、第2推定値X2を更新した第1推定値X1で上書きし、更新に用いたセンサ情報を削除する(S4,S5,S7,S8)。第1条件を満たさない場合に、新たに受信したセンサ情報Ynを用いて、内部状態を予測し、第2推定値X2を予測した内部状態に更新して記憶する(S9)第2推定値X2を対象物の内部状態として出力する(S10)。
(もっと読む)
制御装置の設計支援装置および設計支援方法、ならびに制御装置

【課題】入力信号間または入出力信号間で信号周期が異なる制御装置を簡易に設計する。
【解決手段】本発明にかかる設計支援装置は、第1センサおよび第2センサからの入力信号に基づいて制御対象へ制御信号を出力する制御装置を設計するための設計支援装置であって、第1センサから入力される第1入力信号の入力周期、第2センサから入力される第2入力信号の入力周期、制御対象への制御信号の出力周期を、ユーザから受け付ける周期入力手段と、制御装置の設計情報をユーザから受け付ける設計情報入力手段と、第1入力信号と第2入力信号の信号周期を制御信号の出力周期にレート変換するフィルタ機能と、レート変換された第1入力信号と第2入力信号を入力として前記設計情報にしたがって制御対象への制御信号を演算するための演算機能と、を含むプログラムコードを出力するコード生成手段と、を備える。
(もっと読む)
プラント運転システム
【課題】
複数の入力項目と複数の出力項目を有するプラントを対象として、トレードオフの関係にある出力項目の値を考慮した操作量を迅速に決定できるプラント運転システムを提供する。
【解決手段】
複数のプラントの出力項目のそれぞれについて出力許容範囲を設定する出力許容範囲設定部82と、全ての出力項目の値が出力許容範囲設定用図形86で設定した出力許容範囲内となるプラントの操作項目の操作量の組合せである許容操作量を求める許容操作量取得部52と、許容操作量の値、又は許容操作量の値の存在範囲を画面に表示する許容操作量表示部54と、許容操作量に対応する出力項目の値を画面にグラフ表示する出力項目グラフ表示部56と、を備えた。
(もっと読む)
倒立車輪式移動ロボットとその制御方法
【課題】重心位置や路面傾斜角が変動した場合であっても目標とする倒立走行を行うことが可能な倒立車輪式移動ロボットとその制御方法を提供すること。
【解決手段】本発明にかかる倒立車輪式移動ロボットで10は、駆動輪2を駆動する駆動部12と、倒立車輪式移動ロボット10の実状態を検出する検出部14と、検出部14によって検出した実状態と目的状態の偏差に応じて制御量を生成し、駆動部12に対して出力することにより、倒立走行を制御する倒立走行コントローラ11と、検出部14によって検出された車輪回転角速度又は車体の移動速度と、目標状態の車輪回転角速度又は車体の移動速度の偏差に応じた車体傾斜角補正量を、目標状態に含まれる目標車体傾斜角に反映させる車体傾斜角補正量算出部19とを備えている。
(もっと読む)
位置決め制御装置の制御パラメータ調整装置及び制御パラメータ調整方法
【課題】パラメータの調整を少ない試行回数で実現する制御パラメータ調整装置を得る。
【解決手段】大きくすると指令追従性を向上させる追従性パラメータを第一の間隔で順次変化させて位置決め制御を行い整定特徴量を測定し、この整定特徴量が許容値を超えない領域に属する追従性パラメータ、及び許容値を超える領域に属する追従性パラメータを求め、二つから決定される領域を精探索の範囲とし、この範囲を、第一の間隔よりも小さい第二の間隔で追従性パラメータを増加或いは減少させ、増減の度に位置決め制御を行い、整定特徴量を測定して適切な制御パラメータを探索する。
(もっと読む)
ディジタル信号処理回路およびディジタル制御回路
【課題】
アナログPID制御に対応するディジタル制御を、移動平均処理等を行う第1フィルタと、低域通過処理等を行う第2フィルタ回路とを組み合わせて実現したディジタル信号処理回路およびこの処理回路を搭載したディジタル制御回路を提供する。
【解決手段】
ディジタル信号処理回路11は、ディジタル値Xを入力する移動平均回路111Aと、ディジタル値を入力し、微分処理を行う微分回路112と、移動平均回路111Aの出力と微分回路112の出力とを加算する信号を生成する加算回路113とを備え、移動平均回路111Aにおいて生じる位相の遅れを、微分回路112の出力により補償することを特徴とする。
(もっと読む)
車両の制御装置および制御方法
【課題】運転者が期待する駆動力をより精度よく反映した駆動力を得る。
【解決手段】ECUは、アクセル開度センサ8010から送信された信号に基づいてアクセル開度を検出するステップ(S100)と、車両から実際に出力される現在の駆動力を算出するステップ(S102)と、車両から実際に出力される現在の駆動力およびアクセル開度に応じて、運転者が期待する駆動力を推定するステップ(S104)と、運転者が期待する駆動力と、車両が実際に出力する現在の駆動力との差が小さくなるように、スロットル開度の目標値を決定するステップ(S106)と、実際のスロットル開度が目標値と一致するように電子スロットルバルブ8016を制御するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
触媒合金水素センサ装置および方法
精製または化学プロセスを制御する方法が開発された。本方法は、フィード導管(206)をプロセスユニット(222)に流すステップと、エフルエントストリーム(242)を生成するように、フィードストリームに作用するステップと、エフルエントストリーム(242)をプロセスユニットから離して流すステップと、フィードストリームまたはエフルエントストリームの少なくとも一部分を、触媒合金水素センサ(212)を通過させ、フィードストリームまたはエフルエントストリーム内に存在する水素濃度に相当する信号を発生するステップと、信号をディスプレイユニットに渡すステップと、少なくとも触媒合金水素センサ(212)によって発生した信号に応答してプロセスの動作パラメータ(232)を調整するステップとを含む。ディスプレイユニットは、動作パラメータを自動的に調整するコンピュータ(230)の一部であってよい。触媒合金水素センサ(212)は、パラジウムニッケル触媒合金水素センサであってよい。  (もっと読む)
(もっと読む)
プラント制御装置
【課題】 操作信号を変更する効果およびこの効果が得られる物理的理由を短時間で分析し、これらの分析結果を画面表示可能なプラント制御装置を提供する。
【解決手段】 計測信号DB210と、操作信号DB250と、数値解析実行手段220と、数値解析結果DB240と、操作信号に対する計測信号の値を推定するモデル230と、モデル230を用いる学習手段260と、学習情報DB270と、操作信号生成手段280で用いる情報の制御ロジックDB290と、プラント運転特性の知識DB400と、知識DB400と学習情報DB270と操作信号DB250と計測信号DB210の情報により数値解析結果DB240の情報を処理する分析手段300とを備え、分析手段300は、操作方法の妥当性の学習根拠分析手段310と、操作信号がプラントに与える効果と異常な計測信号の有無を評価する信号分析手段320と、知識DB400の情報を修正する知識DB更新手段330との少なくとも1つを含む。
(もっと読む)
シーク制御方法、シーク制御装置および媒体記憶装置
【課題】二自由度制御を行う現在オブザーバ制御によるシーク制御制御装置において、シーク制御からフォローイング制御への切り替え時の電流段差を防止する。
【解決手段】シーク制御からフォローイング制御への切り替え時に、電流段差解消軌道生成部(28)が、電流値u(n),u(n−1)の差分から段差分の電流値Udiffを計算し、この計算値を相殺する目標位置軌道r‘(n)(又は目標電流軌道)を、フォローイング用コントローラ(22)に供給する。このため、出力電流の電流段差が解消される。
(もっと読む)
多重モード制御アルゴリズム
多重モード制御アルゴリズムを使用して、流体の流量を制御するためのシステムおよび方法を説明する。一実施形態は、閉ループモードから開ループモードに多重モード制御アルゴリズムを変化させるための方法を含む。本方法は、センサによって生成される少なくとも1つのセンサ指標を受信するステップを含む。多重モード制御アルゴリズムは、少なくとも1つのセンサ指標に基づいて、閾値条件が充足される場合に、閉ループモードから開ループモードに修正される。多重モード制御アルゴリズムは、設定値に従って流体の流量を制御するために、流量制御器によって使用される。 (もっと読む)
最適制御方法、最適制御システム、統括制御装置およびローカル制御装置
【課題】複数の制御パラメータの最適化を可能とし、かつ、その制御システムの構築に要する時間と工数とを低減することを可能にする。
【解決手段】最適制御システム10は、ローカル装置4を制御するローカル制御部31と、複数のローカル制御部31を統合的に制御する統括制御装置2と、ローカル制御部31と統括制御装置2との間にあって、その間で送受信される制御情報を標準化する制御情報標準化インタフェース1とからなる。そして、制御情報標準化インタフェース1は、ローカル装置4の制御について所定の標準物理量で表した制約条件、評価関数、属性情報を記憶した制御条件情報記憶部12と、ローカル装置4から取得されるローカル物理状態量を標準物理状態量に変換するとともに、統括制御装置2によって算出された最適制御目標値をローカル制御目標値に変換する物理量変換部11とを備える。
(もっと読む)
プラントの制御装置
【課題】制御操作時に状態が改善しない、又は、悪化するリスクを低減し、制御性能を向上させ常に安定した操作が可能なプラント制御装置を提供することを目的とする。
【解決手段】プラントの計測データを入力し前記プラントへの操作指令値を演算する基本制御指令演算手段と、前記計測データ及び前記操作指令値を有する運転データを蓄積する運転実績データベースと、現在の前記運転データと過去の前記運転データに基づいて類似状態を検索・抽出する状態検索手段と、該状態検索手段で抽出された類似状態である過去の運転データにおいて、制御操作による運転状態の変化実績から頻度分布または確率分布を算出し、前記制御操作による改善確率または非改善確率を算出する改善確率演算手段と、該改善確率演算手段で算出した改善確率または非改善確率に基づいて、次の操作指令値を決定する操作指令決定手段を具備することを特徴とするプラントの制御装置である。
(もっと読む)
制御装置
【課題】繰り返し試行する時間を省くことで力制御ゲインの設定及び調整を容易に行うことができる制御装置を提供する。
【解決手段】力制御回路7の内側に位置制御回路8を有する力制御システムによりロボット1を力制御する制御装置において、ロボット1を駆動する実際の制御条件で、ロボット1の個々の駆動軸に関する位置制御回路8の時定数Tを取得する時定数取得手段11と、ロボット1を駆動する実際の制御条件で、ロボット1の剛性値Kを取得する剛性値取得手段12と、力制御回路7の時定数が位置制御回路8の時定数Tより大きくなる条件で、時定数取得手段11で取得された位置制御回路8の時定数Tと剛性値取得手段12で取得された剛性値Kとから力制御回路7の力制御ゲインを算出するゲイン自動算出手段10と、を備える。
(もっと読む)
スライディングモード制御を用いた制御装置及び制御方法
【課題】 車両用の無段変速機等の制御に好適な、スライディングモード制御を用いた制御に関し、制御のハンチングをより確実に防止することができるようにする。
【解決手段】 無段変速機の目標変速比に応じた可動プーリの第1目標ストロークx1*を設定し、第1目標ストロークx1*に、可動プーリの実ストロークxとこの第1目標ストロークx1*との偏差e´の大きさに応じた遅れを与えて得られる第2目標ストロークx2*を用いてスライディングモード制御の切り換え関数σを設計し、この切り換え関数σに基づいてスライディングモード制御の非線形入力u´nlを演算し、演算した非線形入力を含む制御入力によりスライディングモード制御により可動プーリの位置を制御し、目標変速比状態とする。
(もっと読む)
同時プロセスシミュレーションを伴う多目的予測プロセス最適化
プロセスを制御するためのシステムと方法には、プロセスのシミュレーションを行いプロセスの模擬出力を生成することと、プロセスからの被測定入力に基づき、且つプロセスシミュレーターからの模擬出力に基づいて、一式の目標値を開発することと、プロセス制御システムの各作動サイクル中に一式の目標値に基づいてプロセスを制御するように構成された複数の制御出力を生成することとが含まれる。模擬出力には、プロセスの定常状態にいたるまでの一つ又は複数の予測将来値が含まれる。  (もっと読む)
(もっと読む)
移動台車の制御方法及び移動台車
【課題】駆動手段により駆動される車輪と、該車輪に支持される車体と、前記駆動手段に制御指令値を与える制御手段とを備え、車体の重心が車輪の回転軸の上方に位置する移動台車の制御方法において、車体に大きな外力が加わっても、台車(車輪位置)の移動を最小限にして、その場での安定した位置制御を可能とすることにより、人の搭乗性や物の搭載性を向上する。
【解決手段】制御コンピュータ10は、車体1に加わる外力により発生する車輪2・3の回転軸回りの慣性モーメントである外力モーメントを推定し、車体1の重心の前記回転軸回りの重力モーメントが、外力モーメントと釣り合う車体1の傾斜角度を目標車体傾斜角度として設定し、この目標車体傾斜角度に基づき、モータ4・5へのトルク指令値を算出する構成とした。
(もっと読む)
プロセス制御装置における非干渉制御方法、およびプロセス制御装置
【課題】 自動制御を行う3系列以上の制御ループに容易に適用することができ、かつ各制御ループの相互干渉を十分に抑えることが可能な非干渉制御方法を提供する。
【解決手段】 少なくとも3入力3出力以上の入出力変数を有するプロセス2と、このプロセス2と共に3系列以上の制御ループを構成する制御系3を有する。この制御系3は、3系列以上の制御ループの間に各制御ループ間の相互干渉を打ち消す非干渉要素29を備える。この非干渉要素29は、各制御ループの伝達関数および他の制御ループから干渉してくる干渉要素の伝達関数をむだ時間を含んだ一次遅れ系の応答形に近似して算出したものとする。
(もっと読む)
モデル予測制御装置およびモデル予測制御方法
【課題】 モデル予測制御において、予測演算時間を短縮しかつ安定制御を実行する。
【解決手段】 最適操作量候補検索部31により、最適操作量の候補を検索し、モデル予測部33により、制御対象20の動特性モデルを用いて制御量を予測し、評価部35により、予測された前記制御量と目標値との偏差をとって評価し、最適操作量を決定する。最適操作量候補の検索に先立って、操作量検索範囲設定部4により制御対象の動特性モデルを用いて検索範囲を設定し、無駄な検索を行なわないようにする。また、今回の予測制御を開始するにあたって、前回の最適操作量を今回の最適操作量の候補として予測した制御量と目標制御量との偏差が所定範囲内にある場合、前回の最適操作量を今回の最適操作量と決定するようにすれば、さらに予測に要する時間を短縮することができる。
(もっと読む)
モデル予測制御方法
【課題】 モデル予測制御において、最適化演算の処理時間を短縮し、かつ演算精度の低下を抑える。
【解決手段】 制御対象の動的モデルを用いて操作量の各変数について数値微分を行って微分値を求め、微分値を要素とするヤコビアン行列に基づいて評価点を移動させ、移動した評価点ごとに評価を行なって最適操作量を決定するモデル予測制御方法において、微分値を所定値と比較して(S13)微分値が所定値より小さい場合、評価省略フラグをオンにする(S14)。次回のヤコビアン行列作成プロセスでは微分値を0として、数値微分を省略できる。この場合、微分値を0とする数値微分ステップが終了すると評価省略フラグをオフにして(S18)、その次の数値微分ステップでは数値微分を行なうようにすると、演算精度が向上する。
(もっと読む)
1 - 20 / 21
[ Back to top ]