
Fターム[5H004KC42]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 適応制御 (647) | 同定器を有するもの (225)
Fターム[5H004KC42]の下位に属するFターム
適応同定器を有するもの (17)
同定信号を用いるもの (12)
同定法 (35)
セルフチューニングレギュレータ (12)
セルフチューニングコントローラ (126)
Fターム[5H004KC42]に分類される特許
1 - 20 / 23
適応制御装置および適応制御方法ならびに射出成形機の制御装置および制御方法
【課題】 応答性の悪化を防止しつつ最適な適応制御を自動的かつ簡単に行うことができる適応制御装置および適応制御方法ならびに射出成形機の制御装置を提供する。
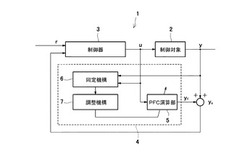
【解決手段】 制御対象2から出力される制御値yに並列フィードフォワード補償器4から出力される補償値yfを加えた帰還値yaと指令値rに基づいて操作値uを出力するようにしてフィードバック制御を行う適応制御装置であって、並列フィードフォワード補償器4は、制御対象2の周波数応答特性を逐次推定する同定機構6と、当該周波数応答特性に基づいて補償値yfを調整する調整機構7とを備えている。
(もっと読む)
制振制御装置、制振制御方法およびコンピュータプログラム

【課題】リアルタイムに最適な制御ゲインを同定し、操業中に最適なゲインを適用することが可能な制振制御装置を提供する。
【解決手段】連続的に搬送される帯状の金属板の、搬送方向に直交し、かつ板面に略垂直な方向の振動を抑制する制振装置を制御する制御器を有する本発明の制振制御装置は、制御器の制御ゲインを同定して変更する情報処理装置を備える。情報処理装置は、金属板の搬送方向と直交する方向の変位を検出する検出装置により検出された金属板の変位実績値と、制振装置の操作実績値とを取得するデータ取得部と、変位実績値および操作実績値に基づいて、制振装置の制御モデルを用いて制御器の制御ゲインを同定する制御ゲイン同定部と、同定された制御ゲインに基づいて、所定のタイミングで制御器の制御ゲインを変更する制御ゲイン変更部と、を備えることを特徴とする。
(もっと読む)
制御装置
【課題】むだ時間や応答遅れが変化する特性を備えた制御対象を制御する場合において、制御精度を向上させることができる制御装置を提供する。
【解決手段】制御装置1のECU2は、4個のむだ時間dがそれぞれ経過したタイミングでの制御量として、4個の予測値PRE_KACT_4-iを算出し、排ガスボリュームVexに対応する4個の重み関数値Wdiを算出し、重み関数値Wdiを予測値PRE_KACT_4-iにそれぞれ乗算することにより、4個の乗算値Wdi・PRE_KACT_4-iを算出し、4個の乗算値Wdi・PRE_KACT_4-iの総和を予測当量比PRE_KACTとして設定し、予測当量比PRE_KACTが目標当量比KCMDになるように、空燃比補正係数KAFを算出する。
(もっと読む)
ロボット制御装置の補正パラメータ同定装置
【課題】減速機角度伝達誤差によるうねりを補正する。
【解決手段】ロボットの手先部に発生するうねりの振幅を求める手段と、複数の関節の所定の関節Jiに対応するうねりの振幅値Diを求める手段と、所定の関節Jiをモータの位置指令θrefiで単軸動作させた際に、関節の軸に現れる位置フィードバック信号Biを計測する手段と、関節Jiに対する位置指令値θrefiに振幅Cのうねりを重畳的に加え、更に、他の軸Jxに位置指令θrefxが加えたと仮定した場合に、手先位置において発生するうねりC’iを計算する手段と、Ai=(Ci/C’i)×Diという式に従って、Biに対応するAiを求める手段と複数のロボットに対して、以上の各手段を用いて、Biに対応するAiを求める手段とを備える、ロボット制御装置の補正パラメータ同定装置。
(もっと読む)
機械装置の制御装置及び機械装置の特性同定方法
【課題】 モータに動力伝達部を介して被駆動部を機械的に結合したものを制御対象とするような機械装置への適用に適し、機械装置における摩擦や装置の自重のような外乱が存在しても精度良く装置特性を同定して駆動制御を実行することのできる制御装置を提供する。
【解決手段】 制御装置は、トルク指令値τMを受けるモータ10と被駆動部11との間を動力伝達部12で連結した慣性共振系を制御対象とし、該制御対象の状態量としてモータ軸角速度ωMを計測する計測手段と、前記モータ、動力伝達部、被駆動部に起因する外乱トルクを推定する外乱オブザーバ17と、推定された外乱トルクを前記トルク指令値から減算する減算部18と、前記減算部の出力及び前記モータ軸角速度ωMに基づいて前記制御対象のパラメータを同定する制御対象特性同定器15を含み、同定されたパラメータに基づいて前記トルク指令値を調整する。
(もっと読む)
モデル不一致を補償するためチューニング可能積分コンポーネントを備えるモデル予測コントローラ
MPCコントローラ技法はMPCタイプのコントローラで今日一般的に使われている方法より良好にフィードバック制御性能を統合し、プロセスモデル不一致の存在下で従来のMPC技法より良好に機能するMPCコントローラをもたらす。具体的には、チューニング可能積分ブロックをMPCコントローラに加えることでMPCコントローラの性能が強化される。このチューニング可能積分ブロックは、予測誤差や他の制御誤差を示す積分コンポーネントを形成し、このコンポーネントをMPCコントローラアルゴリズムの出力へ加えることで、予測誤差のそもそもの究極的理由であるモデル不一致の存在下でより迅速又は良好な制御を提供する。この技法により、MPCコントローラはより速やかに反応し、且つMPCコントローラのロバスト性を低下させることなく、モデル不一致の存在下でより良好な設定点変更及び負荷変動性能を提供することが可能となる。  (もっと読む)
(もっと読む)
プラント監視制御装置、その制御方法及びその制御プログラム
【課題】制御ブロックの構造及び定数の数を予め定めた条件下において指定されたモデルの構造を受け付け、当該指定された構造の定数のみを迅速に算出することで、モデル構造の設定及び当該設定に伴う各パラメータの算出を容易に行うことが可能なプラント監視制御装置、その制御方法及び制御プログラムを提供する。
【解決手段】表示制御手段61は、ユーザにモデル構造として定数G、T1、T2を選択させるために、選択可能とする所定数の定数(G、T1、T2、・・・の8定数)が予め決められたモデル構造を設定装置を介して表示させる。ユーザにより設定装置を介して定数G、T1、T2が選択されると、定数判定手段62は、この選択された定数G、T1、T2を受け付けて伝達関数を指定することでモデルを決定する。
(もっと読む)
パラメータ同定装置及びパラメータ同定プログラム
【課題】複数のパラメータの同定を適切に行う。
【解決手段】同定パラメータの変化量と表間数の変化量の関係(影響度)を調べる(ステップ11)。影響度に応じて各パラメータの影響度が所定の関係になるように補正量を求める(ステップ12)。求めた補正量により修正ゲインを補正する(ステップ13)。
(もっと読む)
機械的共振周波数補償装置
【課題】共振周波数を算出する際の処理速度を向上させる。
【解決手段】サーボモータシステム1は、モータ2に接続されるサーボコントローラ3に機械的共振周波数補償装置21が設けられている。機械的共振周波数補償装置21は、エンコーダ4から速度フィードバック値が入力されるバンドパスフィルタ22と、共振周波数推定器23と、ノッチフィルタ係数発生器24とを備え、共振周波数推定器23は共分散行列の逆行列の値を用いた最小二乗理論によって算出される収斂値としてノッチフィルタの係数を求めるように構成されている。
(もっと読む)
電動機の制御装置
【課題】装置の共振周波数の大きな変化による短時間発振を抑制することができるモータ制御装置を提供することを目的とする。
【解決手段】ノッチ周波数とノッチ幅を含むノッチフィルタパラメータの変更が可能であるノッチフィルタと、振動周波数を推定する振動周波数推定手段を有し、ノッチフィルタのノッチ周波数と推定された振動周波数との間の周波数を前記ノッチフィルタの新たなノッチ周波数として設定するとともに、元のノッチ周波数成分と推定された周波数成分が減衰するようノッチ幅を変更するノッチフィルタパラメータ設定手段を有する。
(もっと読む)
遅延を伴った制御対象を同定するための方法および装置、制御装置およびコンピュータプログラム製品
本発明は、蒸気発生器の制御時に遅延を伴う制御対象を同定するための方法およびこの方法を実施するように形成された装置に関する。未知の時間変動的なN次遅延素子と既知の積分器とから成る蒸気発生器のモデル構造が設けられる。さらに、燃料質量流量の測定値、タービン蒸気質量流量の測定値、タービン蒸気質量流量の取り出し後に蒸気発生器の背後の蒸気アキュムレータ内に生じる主蒸気圧力の測定値が同定に使用される。オンラインで記録されたこれらの測定値とモデル構造とによって蒸気発生器出口の主蒸気質量流量が逆算される。こうしてN次遅延素子の入力量とその出力量が特定され、N次遅延素子の連続伝達関数のパラメータが推定法によってやはりオンラインで確定される。推定されたパラメータは次にN個の独立した時定数を有する遅延素子の時定数に換算される。次のステップではN個の独立した時定数の比較によって、所定のモデル構造の遅延素子について有意な時定数が確定される。 (もっと読む)
リニアソレノイドの電流制御装置
【課題】リニアソレノイドの電流制御装置において、工数やコストをかけずに機差バラツキ及び特性変動を補償する。
【解決手段】リニアソレノイドの電流をフィードバック制御する際、規範モデルからリニアソレノイドの時定数を考慮した理想出力値を算出する。この理想出力値と電流センサで検知した実出力値との差から同定誤差を算出し、この値が0になるよう適応機構に基づき制御定数を決定する。決定した制御定数をフィードバック演算に使用することで、電源電圧や環境温度がどのような状態においても一定の応答性を実現し、さらに、機差バラツキを補償する。
(もっと読む)
モデル作成方法及び適合方法
【課題】複数の制御パラメータの組合せによって特定される各機関制御状態における特性パラメータの値を推定する特性パラメータ推定モデルを少ない計測工数で且つ精度良く作成するモデル作成方法を提供する。
【解決手段】まず、一部の制御パラメータの値を特定の値に固定した場合における残りの制御パラメータと特性パラメータとの関係について物理モデルを作成する。次いで、一部の制御パラメータの値を上記特定の値とは異なる値にすると共に残りの制御パラメータを所定の値として特性パラメータの値を計測すると共に残りの制御パラメータを所定の値として物理モデルによって特性パラメータの値を算出し、これら特性パラメータの計測値と算出値との差分又は比率について統計的近似モデルを作成する。そして、作成された物理モデルと統計的近似モデルとに基づいて特性パラメータ推定モデルを作成する。
(もっと読む)
状態判定装置および状態判定方法
【課題】不可測な外的要因に依存して操作量の平衡点が移動する可能性のある制御対象に対しても適切な状態判定を行う。
【解決手段】状態判定装置は、制御量PVと操作量MVの時系列データについてステップ応答前半の過渡状態のデータを特定する過渡状態データ特定部3と、制御量PVと操作量MVの時系列データのうちの過渡状態のデータにより制御対象のモデル数式を同定する制御対象モデリング部4と、モデル数式に基づいて動的プロセスゲインとプロセス時定数との比率を算出するゲイン時定数比算出部5と、制御対象が特定の状態にある場合の比率の数値範囲を示す判定基準を予め記憶する判定基準記憶部6と、比率と判定基準とを比較して、制御対象の状態が特定の状態にあるか否かを判定する状態判定部7とを有する。
(もっと読む)
モータ制御装置
【課題】 動作が制限される機械系のイナーシャを同定するモータ制御装置を提供する。
【解決手段】 動作に制限条件がある機械を駆動するモータのモータ制御装置であって、速度指令とモ−タ速度によりトルク指令を生成する速度制御部(21)と、前記トルク指令からモータを駆動するモータ駆動部(22)とを備えるモータ制御装置において、イナーシャを同定するイナーシャ同定部(24)と、前記制限条件に基づいて同定指令を生成する同定指令部(25)とを備えた。
(もっと読む)
時定数自動推定方法及び時定数自動推定装置並びにサーボモータ制御システム
【課題】時定数の調整に手間や時間をかけることなく、簡単な計算で容易に推定することができ、サーボモータ調整時の作業負担の軽減を図ることができる時定数自動推定方法及び時定数自動推定装置並びにサーボモータ制御システムを提供する。
【解決手段】読み込まれた動作プログラムを動作させることによって、サーボモータの加減速時の時定数を自動で推定するための時定数自動推定装置6であって、テスト運転のために予め用意してある仮時定数でサーボモータを加速動作させたときのピーク電流値を検出する電流値検出手段8と、ピーク電流値と仮時定数との関係から、本制御時にサーボモータを所望の目標電流値で実際に動作させる際の本時定数を推定する時定数推定手段9と、を備える。
(もっと読む)
モータの負荷イナーシャ推定方法
【課題】 モータのコギングトルクが大きい場合や、負荷の機械系に共振などがあっても、高い精度でモータの負荷のイナーシャを推定する方法を提供する。
【解決手段】 加速度フィードバック信号中の振動を検出する。そしてこの振動が、予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。またこの振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。
(もっと読む)
機械定数同定装置を備えたモータ制御装置
【課題】非線形摩擦や雑音などの影響を抑制し、微小動作のみで負荷の連結したモータ105の粘性摩擦を同定するとともに、粘性摩擦同定値を用いて高精度な制御をすることができる機械定数同定装置を備えたモータ制御装置を提供する。
【解決手段】粘性摩擦同定器108として、位置を入力し位置振幅を出力する振幅演算器109と、前記位置振幅を入力し粘性摩擦同定値を算出し出力する粘性摩擦演算器110とを備える。
(もっと読む)
システム同定装置およびそのシステム同定方法
【課題】低剛性負荷の付いた電動機の多慣性系の慣性モーメント同定を可能とする。
【解決手段】位置指令と位置を入力し位置基本周波数成分を出力する第1基本周波数成分検出器と、位置基本周波数成分を入力し位置評価値を出力する位置評価器と、位置基本周波数成分を入力し位置周波数を出力する周波数検出器と、位置評価値と位置周波数を入力し修正位置評価値を出力する第1演算器と、トルク指令を入力し積分トルク指令を出力する積分器と、積分トルク指令と位置指令を入力し積分トルク指令基本周波数成分を出力する第2基本周波数成分検出器と、積分トルク指令基本周波数成分を入力し積分トルク指令評価値を出力する積分トルク指令評価器と、修正位置評価値と積分トルク指令評価値を入力し慣性モーメント同定値を出力する第2演算器を備える。
(もっと読む)
オンライン弁診断を実行するための方法、システムおよび記憶媒体
オンライン弁診断方法およびシステムである。ステップ応答、摩擦およびスプリングレンジといった弁の特性が、弁診断を行う制御器によって干渉されないプロセスにおいて弁が動作する間に決定される。弁情報が、弁が一連の逐次動作を通じて動作する間のプロセスを制御する制御信号に応答して動作する間に取得される。そして、弁の特性が弁情報から決定される。  (もっと読む)
(もっと読む)
1 - 20 / 23
[ Back to top ]