
Fターム[5H004KC55]の内容
フィードバック制御一般 (10,654) | 制御部 (1,337) | 適応制御 (647) | 外乱変動に対するもの (45)
Fターム[5H004KC55]に分類される特許
1 - 20 / 45
制御装置
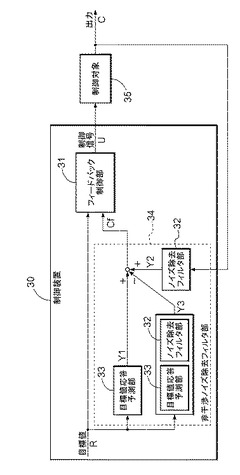
【課題】外乱成分による制御信号の変動を抑制できるとともに、当該制御信号の変動抑制によるフィードバック制御系の応答特性の変動を抑制できる制御装置が求められる。
【解決手段】制御対象の出力が目標値に近づくように制御信号を変化させるフィードバック制御部を備えた制御装置であって、目標値に対して目標値応答予測部の処理を行って第一演算値を算出し、出力に対してノイズ除去フィルタ処理を行って第二演算値を算出し、目標値に対して目標値応答予測部及びノイズ除去フィルタの処理を行って第三演算値を算出し、第二演算値に第一演算値を加算し第三演算値を減算した制御用出力値を算出する処理と数学的に等価な処理を行い、制御用出力値を制御対象の出力として前記フィードバック制御部に入力する制御装置。
(もっと読む)
制御装置

【課題】制御対象モデルが非線形であったり、従来の制御モデルで表現できなかったりする場合においても、制御対象とそれを制御する制御器のフィードバック結合の応答特性を調整することができる制御装置を提供する。
【解決手段】制御装置100の中に制御対象モデルと制御演算を模擬する閉ループ応答模擬部20が設けられる。そして閉ループ応答模擬部20に、調整パラメータと制御性能評価を関連付けるマップを作成する機能をもたせる。こうすることで、制御対象50が非線形性を含む場合などで、従来の線形制御理論がそのまま適用できないケースであっても、適切に制御演算部10における調整パラメータを調整することができる。
(もっと読む)
能動型振動騒音抑制装置
【課題】伝達系の温度が変化することにより実際の伝達関数が変化したとしても、適応制御に用いる伝達関数の推定値と実際の伝達関数とのずれを抑制することにより、高精度に振動や騒音を抑制できる能動型振動騒音抑制装置を提供する。
【解決手段】推定伝達関数記憶部160に、伝達系の温度Tを複数に区分した温度範囲毎に、伝達系の伝達関数の推定値Ghを記憶する。そして、フィルタ係数更新部170は、検出温度Tが含まれる温度範囲における伝達関数の推定値Ghと残留信号eとにより算出される更新値に基づいて、制御信号yの適応フィルタのフィルタ係数a、φを更新する。また、伝達関数同定処理部180は、検出温度Tがそれぞれの温度範囲に含まれる場合にそれぞれの伝達関数Gの同定処理を行い、算出されたそれぞれの伝達関数の推定値Ghを推定伝達関数記憶部160に記憶させる。
(もっと読む)
プラントの制御装置
【課題】 フィードバック制御を行うフィードバック制御器の伝達関数を、制御対象であるプラントに加わる外乱の影響を考慮して適切に設定し、設計工数を抑制しつつ良好な制御性能を得ることができるプラントの制御装置を提供する。
【解決手段】 フィードバック制御器33は、プラント(1,17)の制御出力(KACT)が目標値(KCMDM)と一致するように、プラントへ入力する制御入力(KAF)を算出する。フィードバック制御器33の伝達関数C(z)は、プラントをモデル化することにより得られる制御対象モデルの伝達関数P(z)の逆伝達関数と、制御入力(KAF)に印加される外乱dの制御出力(KACT)への感度を示す感度関数S(z)を用いて定義される外乱感度相関関数との積で表され、感度関数S(z)は、プラントの応答特性を示す応答特性パラメータ(α)を用いて定義される。
(もっと読む)
ロボットおよびその行動制御システム
【課題】上体の運動によって指定タスクを実行しながら、継続的に安定することができるロボット等を提供する。
【解決手段】本発明のロボット1または行動制御システム2によれば、確率遷移モデルにしたがって、腕体の運動状態を表わす「第1状態変数」の時系列的な変化態様が、第1状態変数のうち少なくとも1つがロボット1に指定タスクを実行させるための第1指定運動軌道{r}に追従するように生成される。また、同じく確率遷移モデルにしたがって、上体の運動状態を表わす「第2状態変数」の時系列的な変化態様が、第2状態変数が継続的に安定な動力学的条件を充足するように生成される。
(もっと読む)
プロセス特性変化に対応できる制御方法および制御装置
【課題】塗工機の制御では、塗工量と制御信号との関係が逆転する逆転範囲が時間と共に移動するので、ブレードポジションの制御範囲を、逆転範囲を含まないように狭くせざるを得なかった。また、逆転範囲と制御範囲が重なるとオペレータが手動で操作しなければならなかった。そのための、ブレード交換の頻度が増加し、コストの増大、操業率の低下、オペレータの負担増のない技術を提供する。
【解決手段】現在および過去のプロセス量測定値と制御信号から逆転範囲に入っているかどうかを判定し、逆転範囲に入っていると、通常範囲で用いるゲインとは異なる逆転ゲインを設定し、この設定したゲインと、プロセス量設定値と測定値の差分から制御信号を演算するようにした。また、プロセスの特性を推定し、境界付近にあると制御信号を一時的に大きくして境界付近から脱出させ、この特性が変化するとその変化を補償するように制御信号を変化させるようにした。
(もっと読む)
機械装置の制御装置及び機械装置の特性同定方法
【課題】 モータに動力伝達部を介して被駆動部を機械的に結合したものを制御対象とするような機械装置への適用に適し、機械装置における摩擦や装置の自重のような外乱が存在しても精度良く装置特性を同定して駆動制御を実行することのできる制御装置を提供する。
【解決手段】 制御装置は、トルク指令値τMを受けるモータ10と被駆動部11との間を動力伝達部12で連結した慣性共振系を制御対象とし、該制御対象の状態量としてモータ軸角速度ωMを計測する計測手段と、前記モータ、動力伝達部、被駆動部に起因する外乱トルクを推定する外乱オブザーバ17と、推定された外乱トルクを前記トルク指令値から減算する減算部18と、前記減算部の出力及び前記モータ軸角速度ωMに基づいて前記制御対象のパラメータを同定する制御対象特性同定器15を含み、同定されたパラメータに基づいて前記トルク指令値を調整する。
(もっと読む)
操舵制御装置
【課題】周波数特性の解析等の複雑な処理を用いなくとも、制御に起因する発振状態と周期的なヨーイングとを正確に区別することができる操舵制御装置を提供する。
【解決手段】方位センサ12は、船首方位θHを検出し、ロール角センサ15は、ロール角を検出する。加算器13は、方位設定部11から出力された目標方位θrから船首方位θHを差分して偏角θ=θr−θHを求める。制御状態監視部14は、偏角θおよびロール角の時間的変動を監視する。制御状態監視部14は、偏角θが周期性を有し、かつロール角が周期性を有する場合、発振状態ではない(外乱の影響により周期的なヨーイングが発生している)と判断し、制御部16の制御パラメータを上昇させる。
(もっと読む)
駆動制御装置
【課題】 駆動機械の過大慣性振動を検出し、この過大慣性振動を抑制して安定な制御系を実現する駆動制御装置を提供する。
【解決手段】 位置指令信号と位置信号を入力とし駆動機械1の速度指令信号を出力する位置制御手段5と、速度指令信号と速度信号を入力としトルク指令信号を出力する速度制御手段6と、駆動機械1を駆動するトルクがトルク指令信号に一致するよう制御するトルク制御手段2と、開ループ周波数応答のゲイン交差周波数が、周波数の増加に伴い開ループ周波数応答の位相が増加するときの位相交差周波数以下となる状態を検出することにより、慣性設定値に対する駆動機械の慣性が大きいことで制御系が不安定となり発生する過大慣性振動を検出する振動検出手段7と、過大慣性振動が検出された場合に速度制御手段6或いは位置制御手段5のゲインを変更することで振動を抑制する振動抑制手段8を備える。
(もっと読む)
外乱推定装置、制御対象モデル推定装置、フィードフォワード量推定装置および制御装置
【課題】運転条件が異なる毎に、外乱波形や制御対象モデルを同定するための計測を行うことなく、外乱波形および制御対象モデルのパラメータを推定できるようにする。
【解決手段】設定温度100℃で計測した外乱波形と設定温度300℃で計測した外乱波形とから、設定温度200℃の外乱波形を補間によって推定するようにしており、これによって、設定温度200℃での外乱波形の計測を不要としている。また、この補間した外乱波形を用いて設定温度200℃のフィードフォワード補正量を推定するようにしている。
(もっと読む)
モータ制御装置及びその設計方法
【課題】 モータ駆動等による多慣性共振特性を持つ機械装置の運動制御において、機械装置の振動を抑制しつつ、適切な指令応答特性を得ることのできる制御装置を提供する。
【解決手段】 モータ制御装置は、モータと負荷及びこれらを結合する結合部とを含む多慣性共振系を制御対象とし、制御指令値と制御対象からフィードバックされる状態量との差に基づいてモータを制御する閉ループ制御系を備え、該閉ループ制御系はモータ速度指令からモータトルク指令を決定する第1の制御手段を含むほか、前記状態量に応じて振動を抑制する制振制御器10を備える。前記第1の制御手段の第1のゲイン、前記制振制御器の第2のゲインを、閉ループ制御系の感度特性のカットオフ周波数ωS、閉ループ制御系の相補感度特性のカットオフ周波数ωCSを調整パラメータとして決定する。
(もっと読む)
ステージ装置、露光装置、及びステージ制御方法
【課題】ステージを駆動する際に生じる振動を効果的に抑制する。
【解決手段】所定タイミングで検出された制御対象301の位置と所定位置との誤差を、前記タイミングからの時間経過に応じてフィードフォワード制御部102による操作量を変更することによって補正するとともに、フィードバック制御部103への外部入力をフィードフォワード制御部102による補正量に応じて変更する制御部104を備える。
(もっと読む)
精密位置決め装置
【課題】 精密ないし微小な部品でも安定して位置決めしながら組立等の作業を行うことを可能にする精密位置決め装置を提供する。
【解決手段】 磁界に置かれたコイルを弾性案内部材により所定の方向に変位可能に支持し、該コイルに電流を流すことによってコイルを含むアクチュエータを駆動し、アクチュエータの変位により部品の位置決めを行うボイスコイルモータ5と、アクチュエータの変位を検出する変位センサ18と、変位センサで検出された変位から速度及び加速度を算出し、アクチュエータの位置、速度及び加速度と任意に設定した外力とからアクチュエータの駆動力を演算してそれに応じたコイル供給電流を出力するコントローラ6とを備える。
(もっと読む)
浮体と船の相対位置制御方法及び同システム
【課題】洋上プラットフォームの運動に応じてシャトルタンカーを安全領域の中で稼動できるように制御すること等が可能な浮体と船の相対位置制御方法及び同システムを提供すること。
【解決手段】シャトルタンカー1000周りの環境状況を検出する各種センサ200と、環境状況とこの環境状況により船体に働く環境外力の関係を予め算出して蓄えた外力データベース10と、各種センサ200の検出結果と外力データベース10のデータに基づいて船体に働く外力を評価する外力評価手段20と、外力が最少になるように船首方位を最適化する船首方位最適化手段30と、この出力に基づいて少なくとも目標とする浮体構造物2000に対する船首方位を制御するダイナミックポジショニング制御装置500とを備えて構成される。
(もっと読む)
モデル予測制御方法およびモデル予測制御装置
【課題】モデルを用いた予測制御において、外乱に対する応答性能を調整できるようにする。
【解決手段】モデル予測誤差を用いて外乱補償を行うとともに、制御対象2のモデルを用いてモデル予測制御を行うMPCコントローラ3への前記モデル予測誤差を、調整手段5で調整パラメータαを用いて補正することにより、MPCコントローラ3のよる外乱補償の度合いを調整できるようにしており、調整手段5では、制御対象2の特性に基づいて、前記調整パラメータαを算出する。
(もっと読む)
呼吸加熱器の閉ループ制御のためのPID係数調整
【課題】流量の測定を必要とせず呼吸システム内の温度測定に依拠する信頼性のあるPIDフィードバック制御を提供すること。
【解決手段】呼吸システム(10)のために設けられる加熱器システム(16)は、PIDフィードバック制御(100)を有し、PIDフィードバック制御(100)では、ウォームアッププロセスなどの際に係数が調整され、係数は、流量または湿度レベルを直接監視することを必要とせずに、温度目標値に関する熱入力と熱出力の間の差に基づいて、加熱された水(27)のチャンバ(20)を通る気体の推定流量に対応するように調整される。目標値に関する測定された温度の挙動に基づく係数の定常状態調整もまた開示される。
(もっと読む)
制御システム及びその調整方法
【課題】制御システムに迅速応答及び微小誤差となる時に、モータ等被制御体出力信号の超越量を減少すると共に調整の時間を減少させ、これにより制御システムの強健性を達成する。
【解決手段】被制御体により発生された出力信号を制御する制御システムを提供する。該制御システムは主制御ユニットと第1の調整ユニットと第2の調整ユニットとを備えてなり、第1の倍率及び第2の倍率の二つの重みパラメータの調整を介して制御システムの強健性、快速応答を達成すると共に、被制御体出力信号の超越量を消失又はゼロに接近させる。制御システムは目標周波数幅、低周波数干渉への抵抗及び伝達関数への追従の技術的特徴を具備し、主制御ユニット、第1の調整ユニット及び第2の調整ユニットの設計、及び第1の倍率と第2の倍率との二つの重みパラメータの調整により、実機整調の方式で上記の技術的特徴が達成される。
(もっと読む)
制御システム及び制御方法
【課題】予め設定されている制御に加え、予測に基づく制御を含む知能的な制御を行なうことができる制御システム及び制御方法を提供する。
【解決手段】屋上緑化エリアGへの灌水のための電磁弁13,13を駆動制御対象とし、土中に埋められた湿度センサ14,14で測定される湿度によって開閉を制御するように設定してある開閉装置23に対し、エージェント装置3は、屋上緑化エリアGを含む周辺の気象情報を自律的に取得し、気象情報が天候悪化(降雨の可能性が高い)を示している場合は、電磁弁13,13を開放させないようにする制御値(開放可否を示す制御値)を示す信号を開閉装置23へ送信する。
(もっと読む)
電動機の制御装置
【課題】装置の共振周波数の大きな変化による短時間発振を抑制することができるモータ制御装置を提供することを目的とする。
【解決手段】ノッチ周波数とノッチ幅を含むノッチフィルタパラメータの変更が可能であるノッチフィルタと、振動周波数を推定する振動周波数推定手段を有し、ノッチフィルタのノッチ周波数と推定された振動周波数との間の周波数を前記ノッチフィルタの新たなノッチ周波数として設定するとともに、元のノッチ周波数成分と推定された周波数成分が減衰するようノッチ幅を変更するノッチフィルタパラメータ設定手段を有する。
(もっと読む)
位置制御装置
【課題】位置制御装置における摩擦外乱を適切に補償できるようにする。
【解決手段】移動方向信号出力部27は、移動体の移動方向を判定し、その移動方向に応じた信号を出力する。移動方向信号出力部27の一方の移動方向に応じた信号をフィルタ処理する第1フィルタ回路25と、移動方向信号出力部27の他方の移動方向に応じた信号をフィルタ処理する第2フィルタ回路26を設けて外乱相殺フィードフォワード補償器(FFC)を構成する。第1フィルタ回路25は、無駄時間回路部21と正方向フィルタ23とから構成し、第2フィルタ回路26は、無駄時間回路部22と負方向フィルタ24とから構成する。正方向フィルタ23、負方向フィルタ24を通過した出力Yp 、Ym を足し合わせてFFC指令を求め、このFFC指令をモータ(駆動源)への位置指令に足し合わせて該位置指令を補償する。
(もっと読む)
1 - 20 / 45
[ Back to top ]