
Fターム[5H004LA03]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | むだ時間を有するもの (91)
Fターム[5H004LA03]に分類される特許
1 - 20 / 91
規範応答演算装置およびそれを用いた車両用制駆動力制御装置
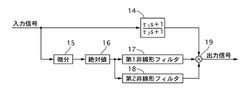
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用制駆動力制御装置を提供する。
【解決手段】 入力信号uに進み遅れ要素を与えて規範加速度応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいて第1および第2ゲインy1,y2を演算する第1および第2非線形フィルタ17,18と、規範応答ベース値にゲインy1,y2を乗算して規範加速度応答を演算する乗算器19と、を備える。
(もっと読む)
プラントの制御装置

【課題】プラントのプロセスの時間因子に起因する操作変数間の相互作用を考慮し、その影響が最小となるような操作変数間の操作手順を自動演算する。
【解決手段】複数のロジック演算に使用する操作変数を保存する制御ロジックデータベースと、ロジック演算を実行しプラントに与える複数の制御信号を生成する制御信号生成部と、操作変数の操作手順を演算する操作手順演算部を備え、操作手順演算部は、複数の操作変数のうち、互いに関連する操作変数について、第1の操作変数のロジック演算結果と第2の操作変数が加味されるまでの間のロジック演算における遅れ時間を操作変数毎に求めて、複数の操作変数の操作手順を決定する。制御信号生成部は、複数のロジック演算で使用する操作変数の大きさを変更するとき、この操作変数に関連する他の操作変数の変更順序を操作手順演算部で求めた複数の操作変数の操作手順に従って実行する。
(もっと読む)
モデル不一致を補償するためのチューニングを有する頑健な適応モデル予測コントローラ
【課題】MPC適応およびチューニング技法は、MPCタイプコントローラにおいて良好にフィードバック制御性能を統合し、プロセスモデル不一致の存在下で良好に働くMPC適応/チューニング技法をもたらす。
【解決手段】MPCコントローラ性能は、コントローラ適応/チューニングユニットをMPCコントローラに追加することにより高められ、その適応/チューニングユニットは、最適化ルーチンを実施して、特定の量のモデル不一致またはある範囲のモデル不一致の存在下でオンラインプロセス制御中にMPCコントローラ内で使用するための、最適な一組のコントローラ設計および/またはチューニングパラメータを確定する。閉ループ適応サイクルは、予測誤差または制御誤差に対して自己相関解析を実施して、有意のプロセスモデル不一致がいつ存在するかを判定してもよく、または、所定期間にわたって、プロセスモデル不一致の増減を判定してもよい。
(もっと読む)
バンプレス調節弁操作
【課題】操作の安全性および弁の耐久性確保に不可欠な要件であるバンプレス調節弁操作を実現する手法を提供する。
【解決手段】制御系の開ループ手動操作で、適切なリセット時間で発生する操作量のランプ(傾斜)変化と、これに対する制御量応答とを計測および解析する。解析結果から、操作量から制御量までの定位性制御対象信号伝達特性値、すなわちゲイン定数Kと遅れ時間(等価時定数T+等価むだ時間L)とより、最適リセット時間RoをRo=4*|K|*(T+L)とする。ワンパラメータ(R)チューニングによりバンプレスな調節弁操作を行うことができる。
(もっと読む)
プロセス制御システムにおけるオンライン適応モデル予測制御
【課題】不動作時間が優勢なプロセスループにおいて、および定常状態までのプロセス時間の中でプロセスモデル不一致にされるプロセスループにおいて、PIDコントローラと同じか優れた制御性を有し、プロセス制御システムの分散コントローラの中で容易に実現できる適応コントローラを提供する。
【解決手段】MPC制御モデルを生成するためにプロセスモデルを使用してMPCコントローラアルゴリズムを作成し、MPCコントローラがオンラインで動作している間にMPCコントローラにダウンロードする。シングルループMPCコントローラに適用可能であり、1または2という制御層付きのMPCコントローラで特に有効であるこの技法により、プロセスモデルを変更し、プロセスの通常の動作中にMPCコントローラを含む適応MPC制御ブロック38を適応させることができる。
(もっと読む)
システム同定装置及び同定方法
【課題】プラントの動特性変化を、オペレータにわかりやすいモデルパラメータを用いて、定量的に、日常の制御計算に影響を与えない低計算負荷でプラント操業運転を停止することなく同定するシステム同定装置及び同定方法を提供する。
【解決手段】応答データ記憶装置10から同定処理駆動イベントを検出する同定処理駆動イベント検出装置40、検出された同定処理駆動イベント前後の応答データを切り出す応答データ切り出し装置50、切り出された応答データをもとにプラント動特性変化を同定する動特性変化同定装置60、同定された動特性変化分が与えられた動特性変化検出条件を満たすかどうかを判定し、該条件を満たす場合には表示出力指示を行う動特性変化検出装置70を備える。
(もっと読む)
データ収集装置およびデータ収集方法
【課題】制御量と操作量の整定状態を検出して、制御対象のモデリングのためのデータ収集を実行する。
【解決手段】データ収集装置は、リミットサイクル方式のオートチューニング(AT)を実行するAT実行部1と、制御量の挙動を計測する整定判定条件検出部2と、操作量上限値が出力される時間と操作量下限値が出力される時間を計測する出力時間計測部3と、AT実行中の平均操作量を算出して整定操作量とし、AT実行時の操作量切換点となる制御量を整定制御量とする整定状態推定部4と、AT終了後、整定操作量を出力する出力維持部5と、制御量が整定制御量の近傍にある継続時間が、特定時間以上になった場合に、整定状態になったと判定する整定状態検出部6と、整定状態が検出されたときに、制御対象のモデリングのためのデータ収集を実行するデータ収集実行部7とを備える。
(もっと読む)
簡易手動自動切り替え装置
【課題】手動自動切り替え装置に関し、断線時の切り替え時に安全性を確保し、自動化制御・運転操作全体が簡素化でき、装置の適用分野を拡大できる。
【解決手段】1)手動自動切り替えスイッチの前の正規化ゲイン設定機能によって、固有周波数等の時間に関する第1正規化を行い、手動自動切り替えスイッチの後の正規化ゲイン設定機能によって、プロセスゲイン等のプロセス量に関する第2正規化を行うように振り分ける。2)プロセス量が閾値を超えたときの処理方式として従来の高負荷(高速)運転系や系統連係時のような群運転系における手動移行時操作量保持処理以外に、低負荷(低速)運転系や単独運転系や条件によって適正モードが異なる系などに対する操作量遮断処理によるプロセスの自動遮断モードの条件選択機能も設ける。3)実機においても、実施例のようなシミュレーションによる確認が行えるテストモードを有する手動自動切り替え機能を設ける。
(もっと読む)
フィードバック制御装置
【課題】制御開始時の値付近での実制御量の停滞による応答遅れの増大が発生したときの実制御量のオーバーシュートを好適に抑制することのできるフィードバック制御装置を提供する。
【解決手段】第2ピストンの実変位RYを含むCSC2の状態量の検出及び推定を行うオブザーバー6と、目標軌道に追従して実変位RYが推移するように上記状態量に基づきマスターシリンダー1の供給電流を操作するとともに、実変位RYと目標軌道との偏差Eの累積値である誤差積分値Zに応じて供給電流を操作する積分器5を有したスライディングモードコントローラー4と、を備えるフィードバック制御装置において、実変位RYが制御開始時の値付近で停滞しているか否かを判定するとともに、停滞有りと判定されたときに、目標軌道及び推定状態量X0,X1,X2の初期化を指示する停滞監視部7を備えるようにした。
(もっと読む)
プラントの制御装置
【課題】 プラントを制御する制御量のリミット処理を行うことによる制御性の悪化を最小限に抑制することができるプラントの制御装置を提供する。
【解決手段】 リミット処理の対象となるフィードバック制御量UMとリミット処理後フィードバック制御量UMFとの差分値dLMTの過去値に応じて、フィードバック制御量の修正値DLMが算出され、フィードバック制御量Uを修正値DLMにより修正して、修正フィードバック制御量UMが算出される。修正フィードバック制御量UMのリミット処理が行われ、リミット処理後フィードバック制御量UMFが制御入力としてプラントに入力される。修正値DLMは、プラントの応答特性を示す応答特性パラメータαに応じた値に設定される修正係数KMと、差分値dLMTの過去値とを用いて算出される。
(もっと読む)
オートチューニング装置及びオートチューニング方法
【課題】カスケード接続されたPIDコントローラのPIDパラメータをオートチューニングにより求める。
【解決手段】スレーブ制御量に対して2位置制御を行い測定したリミットサイクル波形からスレーブコントローラ5のPIDパラメータを求め及びスレーブ側制御対象9を一次遅れ+むだ時間モデルで同定し、マスタ制御量に対して2位置制御を行い測定したリミットサイクル波形からマスタ側制御対象10を同定する。さらにスレーブ側をフィードバック制御したときの閉ループ伝達関数を求め、このスレーブ側閉ループ伝達関数を一次遅れ+むだ時間モデルで近似することによりマスタPIDコントローラ4のPID定数を算出する。
(もっと読む)
制御装置
【課題】むだ時間や応答遅れが変化する特性を備えた制御対象を制御する場合において、制御精度を向上させることができる制御装置を提供する。
【解決手段】制御装置1のECU2は、4個のむだ時間dがそれぞれ経過したタイミングでの制御量として、4個の予測値PRE_KACT_4-iを算出し、排ガスボリュームVexに対応する4個の重み関数値Wdiを算出し、重み関数値Wdiを予測値PRE_KACT_4-iにそれぞれ乗算することにより、4個の乗算値Wdi・PRE_KACT_4-iを算出し、4個の乗算値Wdi・PRE_KACT_4-iの総和を予測当量比PRE_KACTとして設定し、予測当量比PRE_KACTが目標当量比KCMDになるように、空燃比補正係数KAFを算出する。
(もっと読む)
プロセス制御装置、プロセス制御方法およびプロセス制御プログラム
【課題】むだ時間を有する制御対象に対して、オーバーシュートが小さく、整定時間が短く、さらに外乱抑制特性および設定変更特性が良好なプロセス制御装置を提供することを目的とする。
【解決手段】制御対象2について検出される制御量PVが入力され、制御量に基づき、制御量を調整するための操作量MVを出力して制御量を所定の目標値に制御するプロセス制御装置1であって、目標値から制御量を減算する第1減算部3と、第1減算部からの出力値を積算する積算部4と、積算部の出力値を定数倍する第1乗算部5と、制御開始時における制御量である初期制御量を保存する初期制御量記憶部7と、初期制御量記憶部に保存された初期制御量から現時点の制御量を減算する第2減算部8と、第2減算部からの出力値を定数倍する第2乗算部9と、第1乗算部の出力値と第2乗算部の出力値とを加算して操作量として出力する加算部10とを備える。
(もっと読む)
高度プロセス制御システム及び信頼指数を有する仮想測定による方法
【課題】R2RモデルでのVMのデータ品質を効果的に考量でき、R2R制御及び測定遅延のVMフィードバックループでの信頼度を考量できない問題を克服し、且つ、APC効能を向上させる方法を提供する。
【解決手段】APCシステムは、工程ツール100と、測定ツール110と、仮想測定(VM)モジュール120と、信頼指数(RI)モジュール122と、R2Rコントローラ130とを備える。工程ツールに使用される、複数の履歴ワークを処理するための複数組の履歴工程データを取得し、測定ツールによって履歴ワークの複数の履歴測定データを取得する。複数組の履歴工程データ及び履歴測定値を用いることによって、推定アルゴリズムに基づいて推定モデルを構築し、複数組の履歴工程データとそれらに対応する複数組の履歴測定値を用いて、参照モデルを構築する。R2Rコントローラは工程ツールを制御して、工程ランを実行させる他のステップを実行する。
(もっと読む)
プロセスモデルの高速同定および生成
【課題】プロセスモデルの高速同定および生成を提供する。
【解決手段】高速プロセスモデル同定技術は、比較的短期間でプロセス出力の初期応答からプロセス入力の変化までの積分ゲイン及びプロセス無駄時間の推定値を構築することで、プロセス入力とプロセス出力との間の動的関係を同定する。積分ゲインおよび無駄時間値が、多くの異なる種類のプロセスのいずれかに対して完全なプロセスモデルを生成するために使用される。これらプロセスモデルは、プロセスシミュレーションを実行するために非常に高速で使用することができるか又は制御目的で使用することができ、プロセスモデルを使用するかそれに依存するプロセス制御システムを従来よりもはるかに高速でオンライン化することができる。さらに、高速モデリング技術を使用したプロセスループを制御する制御装置が、低速プロセスの制御を実行する上で非常に有用である。
(もっと読む)
フィードバック制御装置とフィードバック制御方法
【課題】むだ時間を含む制御対象に対して、安定して制御を行うことができ、かつ、制御量の応答性が良好となるフィードバック制御装置と、フィードバック制御の制御方法とを提供する。
【解決手段】制御量を検出する検出手段と、むだ時間を除いた制御対象の伝達関数の逆モデルに、制御量を入力して、第一出力値を得る第一出力値計算手段と、操作量から、第一出力値を減算して、第二出力値を得る第二出力値計算手段と、むだ時間を除いた前記制御対象の伝達関数に、第二出力値を入力して、第三出力値を得る第三出力値計算手段と、目標値から、制御量を減算して、制御偏差を得る制御偏差計算手段と、制御偏差から、第三出力値を減算して、補正された制御偏差を得る制御偏差補正手段と、補正された制御偏差を入力して、操作量を得るPID制御器と、を具備するものである。
(もっと読む)
状態推定装置及び制御装置
【課題】制御対象の状態(例えば速度)を精度良く推定でき、且つ、サンプル遅れを防止可能な状態推定装置を提供する。
【解決手段】制御対象であるプラントへの制御入力と前記プラントの状態とに基づき前記プラントの状態変数を推定する、オブザーバを含んで構成された状態推定装置11において、前記オブザーバは、前記プラントの状態のサンプリング値であって時間間隔が互いにN(Nは2以上の整数)サンプル離れたサンプリング値と、前記制御入力の連続するサンプリング値とに基づいて、前記状態変数を推定する。
(もっと読む)
信号処理回路、AGC回路、および記録再生装置
【課題】無駄時間のループ特性に対する影響を応答性良く補償することが可能な信号処理回路、AGC回路、および記録再生装置を提供する。
【解決手段】負帰還パス120は、制御信号を生成してメインパス110の入力信号の入力部に供給する負帰還ブロック121と、負帰還ブロックの制御信号が供給され擬似実信号を出力するメインパスブロック111のレプリカブロック122と、レプリカブロックの擬似実信号をループの無駄時間分遅延させる信号遅延ブロック123とを含み、負帰還ブロックとレプリカブロックと信号遅延ブロックとを含んで無駄時間を含む第1のローカル負帰還系ループ126が形成され、負帰還ブロックおよびレプリカブロックにより無駄時間のない第2のローカル負帰還系ループ127が形成され、第1のローカル負帰還系ループは信号遅延ブロックの出力信号と実信号の合成信号を負帰還ブロックに入力させる。
(もっと読む)
加減速時のLPTCを使用したショートスパンシーク制御を行う磁気ディスク装置の制御装置および制御方法
【課題】ノミナルモデルが実プラントとモデル化誤差を含む場合に生じる、追従誤差を目標軌道に加え、目標軌道を再設計することにより目標軌道追従誤差を抑圧する学習型完全追従制御法(Learning based PTC:LPTC)を提案する。
【解決手段】マルチレートフィードフォワード制御を行う完全追従制御器と、シーク制御において、出力信号から目標軌道に対する追従誤差を学習し、新たな目標軌道を再設計するための目標軌道補償信号を生成する学習信号発生器とを備える学習型完全追従制御法により制御を行う磁気ディスク装置の制御装置及び制御方法を提供する。
(もっと読む)
自動化されたPIDコントローラの設計
本発明の実施形態は、ユーザーが、自由形式モデリング環境においてPIDコントローラなどのコントローラの対話型設計を実行できるようにするための技術、コンピュータ読み取り可能媒体、及び装置を提供する。ユーザーは、コントローラの性能に関連付けるのがユーザーには難しい場合があるコントローラのゲイン値の指定をするのではなく、典型的なユーザーになじみのなる特徴を用いてコントローラを調整することができる。  (もっと読む)
(もっと読む)
1 - 20 / 91
[ Back to top ]