
Fターム[5H115PU23]の内容
車両の電気的な推進・制動 (204,712) | 走行用駆動源 (21,653) | エンジン (11,973) | ハイブリッド型 (11,939) | 電動機と発電機があわせて1つのもの (1,244)
Fターム[5H115PU23]に分類される特許
1 - 20 / 1,244
ハイブリッド車両の電動機の駆動制御装置
【課題】 簡単かつ低コストな構成でありながら、車両の駆動を補助する運転領域における電動機の出力特性と、内燃機関の始動の際における電動機の出力特性と、を両立させ、以って始動時及び広い運転領域で良好な電動機の出力特性を実現することができるようにしたハイブリッド車両の電動機の駆動制御装置を提供する。
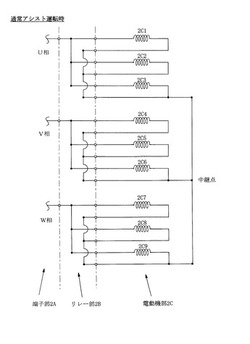
【解決手段】 このため、本発明に係るハイブリッド車両の電動機の駆動制御装置は、内燃機関1と電動機2とを駆動源として備えたハイブリッド車両の電動機2の駆動制御装置であって、運転状態に応じて、各相(U相、V相、W相)毎に複数備わる電動機2の界磁巻線2C1〜2C3、2C4〜2C6、2C7〜29の接続状態を、直列接続と、並列接続と、の間で切り替えることを特徴とする。
(もっと読む)
車両の動力伝達制御装置

【課題】HV−MT車について、後進−前進切り換え時において、車両のショックの発生の抑制、並びに車速の応答性の向上を達成すること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。通常、モータのトルク(MGトルク)は、アクセル開度に基づいて決定されるMGトルク基準値と、クラッチ戻しストロークに基づいて決定されるMGトルク制限値とのうち小さい方(=MGトルク最終基準値)に調整される。シフト位置が「リバース」であり且つMGトルク最終基準値の減少勾配が所定値を超えたとき、MGトルクの減少勾配が前記所定値に制限される。シフト位置が「1速」であり且つクラッチが完全分断状態にあり且つアクセルペダルの操作が開始されたとき、MGトルクがMGトルク最終基準値より大きくされる。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】要求制動トルクをモータジェネレータによる制動トルクおよび機械式ブレーキによる制動トルクの両方で分担する場合に、エンジンを始動する際の駆動力変動をモータジェネレータによって適切に抑制できるようにする。
【解決手段】エンジン12を始動する際に、予め駆動系制動トルクの分担量上限値が制限され、それに伴ってモータジェネレータMGによる制動トルクの分担が低減される一方、その制動トルクの低下を補完するように油圧ブレーキ62による制動トルクの分担が大きくされる。このため、制動トルク制御とエンジン12の始動制御とが重なった場合でも、要求制動トルクに応じた制動トルクを発生させつつモータジェネレータMGによる制動トルクに余裕を残すことができ、そのモータジェネレータMGによる制動トルクの制御でエンジン12の初爆トルクを適切に吸収して駆動力変動を抑制することができる。
(もっと読む)
速度予測装置及びプログラム
【課題】過去に走行したことのない道路であっても、速度パターンを精度良く予測することができるようにする。
【解決手段】道路勾配取得部37によって、探索経路の各リンクの道路勾配を取得する。操作状態予測部38によって、道路勾配の状態毎に学習したアクセル操作状態の状態遷移確率と、取得した道路勾配とに基づいて、各リンクのアクセル操作状態の時系列データを予測する。速度パターン生成部40によって、アクセル操作状態毎に学習した道路勾配と加速度との関係と、取得した道路勾配と、予測されたアクセル操作状態の時系列データとに基づいて、各リンクにおける速度の時系列データを予測する。
(もっと読む)
ハイブリッド車両における回生システム
【課題】クラッチの接続・非接続にかかわらずフリクションを抑えて回生量を十分に大きくとることができるハイブリッド車両における回生システムを提供する。
【解決手段】エンジン22と、モータ106と、エンジン22からの動力を後輪WRに伝達させるかを切り換えるクラッチ104と、クラッチ104を制御して、該クラッチ104の接続、非接続を行うクラッチアクチュエータ120と、エンジン22及びモータ106の駆動制御を行うとともに、クラッチアクチュエータ120を制御するMG−ECU102とを備えたハイブリッド車両における回生システム100において、MG−ECU102は、クラッチ104が接続の状態の場合は、モータ106を駆動制御してモータ106に回生を行わせるとともに、エンジン22を駆動制御して運転状態にし、クラッチ104が非接続の状態の場合は、モータ106を駆動制御して前記モータ106に回生を行わせる。
(もっと読む)
車両用駆動装置
【課題】モータ走行時のエンジン押し掛け始動の際に、要求駆動力に応じた最適な駆動ギヤ段に高応答で変速制御できるようにする。
【解決手段】エンジン押し掛け始動を行うときに、押し掛け始動に使用する変速段として、押し掛け始動を行うときのエンジン回転速度が予め設定された必要回転速度以上となる変速段を選択し、該選択した変速段を使用して前記エンジンの押し掛け始動を行うよう制御する(SR1)。エンジンの押し掛け始動を行うときに、現在の目標駆動力に基づきエンジン始動の所定時間後に予測される予測目標駆動力を求め、該予測目標駆動力に基づき予測駆動ギア段を決定する(SR2)。エンジンの押し掛け始動後のエンジン走行用の変速段として、前記決定した予測駆動ギア段を実現するよう制御する(SR3)。
(もっと読む)
ハイブリッド自動車用冷却システム
【課題】エンジンが停止中であって、かつ、インバータが駆動中の場合のポンプの消費電力を低減させる。
【解決手段】冷却水循環路10は、エンジン14及びインバータ12を直列に通過し、エンジン14及びインバータ12を冷却する冷却水が循環される。電動ポンプ26は、冷却水循環路10内の冷却水を循環させる。バイパス経路40は、冷却水循環路10に接続され、エンジン14をバイパスして冷却水を流す。切り替え弁42は、冷却水循環路10内の冷却水がバイパス経路40を流れない第1の状態と、冷却水循環路10内の冷却水がバイパス経路40を流れる第2の状態を切り替える。ECU50は、切り替え弁42を制御する。ECU50は、少なくともエンジン14が停止中であってインバータ12が駆動中である場合に、切り替え弁42を第2の状態とする。
(もっと読む)
車両用学習制御装置
【課題】学習機会の損失を低減することができる車両用学習制御装置を提供すること。
【解決手段】車両用学習制御装置は、クラッチ5と、クラッチ5を介して車両の車輪と接続されたエンジン1と、クラッチ5よりも車輪側に接続されたモータジェネレータ3と、モータジェネレータ3と電力を授受できるバッテリ4と、を有する駆動系と、モータジェネレータ3に動力を出力させて駆動系に関しての学習を行う制御部と、を備える。制御部は、モータジェネレータ3に発電を行わせることが可能な場合、モータジェネレータ3に発電させた電力でバッテリ4を充電した後で学習を行う。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車について、内燃機関トルクを利用して、電動機に電気エネルギを供給するためのバッテリを効率良く充電すること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。シフト位置が「ニュートラル」にあり、摩擦クラッチが接合状態にあり、アクセル開度が「0」であり、バッテリ残量SOCが閾値TH未満である場合に充電条件が成立する。充電条件が成立すると、EGトルクを利用したバッテリの充電が行われる。具体的には、EGトルクを利用してMGが発電機として駆動され、MGの発電により得られた電気エネルギを利用してバッテリが充電される。
(もっと読む)
動力伝達装置
【課題】体格が小さく、長期に亘り初期性能を維持可能な動力伝達装置を提供する。
【解決手段】クラッチ50は、軸方向の少なくとも一部が収容空間35に位置する筒部511を有しエンジン11の出力軸112に接続されるドラム51、筒部511の内壁および第2筒部333の外壁に接続するよう設けられる摩擦係合要素52、および、摩擦係合要素52に押し付けられることで摩擦係合要素52を係合させることが可能な環状の押付部材53を有している。押付部材53は、筒部511の内壁との間に環状の第1隙間531を形成している。押付部材53の摩擦係合要素52とは反対側には、油圧空間56が形成されている。油圧空間56に作動油が供給されることで押付部53材が摩擦係合要素52に押し付けられることにより摩擦係合要素52が係合し、エンジン11の出力軸112とロータシャフト33とが連結する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 連続変速時であってもショックを回避可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータとの間の駆動力の伝達を断接する第1クラッチと、モータから駆動輪へ伝達される駆動力の伝達を断接する第2クラッチと、自動変速機の変速中に、第2クラッチをスリップ状態とするスリップ制御手段と、を備えたハイブリッド車両の制御装置において、スリップ制御手段は、現在の変速と次の変速とを連続で行う連続変速中に、現在の変速が終了した後、かつ、次の変速が終了する前に第2クラッチのスリップ状態を完全締結状態に移行させる場合には、第2クラッチの締結圧を徐々に上昇させることとした。
(もっと読む)
電動車両の踏み込みダウンシフト制御装置
【課題】電気走行中における自動変速機の踏み込みダウンシフトが、大きな加速応答遅れを生ずることなく良好に行われる踏み込みダウンシフト制御装置を提供する。
【解決手段】t1よりアクセル開度APOを増大させたことで、t2に踏み込みダウンシフトが開始され、この踏み込みダウンシフトが、解放要素(ダイレクトクラッチD/C)から締結要素(ハイ・アンド・ローリバースクラッチH&LR/C)へ掛け替える間、アクセル開度APOの増大に伴ってTmoのように増大するモータトルクtTmを制限する。t2からイナーシャフェーズ開始時t3までの変速初期では、イナーシャフェーズ終了時t4のモータ回転数Nmo2で出力可能な最大モータトルクTmo2からイナーシャフェーズ進行用トルク上限値Tlimit(=Tmo2−Tip)を超えないようモータトルクtTmを制限し、イナーシャフェーズ(t3〜t4)中はモータトルクtTmを制限する。
(もっと読む)
制御装置、ハイブリッド自動車および制御方法、並びにプログラム
【課題】電動機による発進に際し、ドライバビリティの違和感を改善させること。
【解決手段】ハイブリッド自動車1が電動機13により発進するのに際し、予め設定されているハイブリッド自動車1のアクセルペダル22の踏み込み量に応じた電動機13の回転速度に基づいて電動機13の回転速度を制御するハイブリッドECU18を構成する。
(もっと読む)
ハイブリッド車両のエンジン停止制御装置
【課題】非走行レンジ選択中に第1クラッチ締結状態でイグニッションスイッチをOFFした時のモータの負トルクが車両の音振性能を悪化させないエンジン停止を実現する。
【解決手段】非走行レンジ選択中に(S15)、第1クラッチ締結状態のまま(S13)、イグニッションスイッチOFFにより(S11)、暖機後アイドル回転数Neidを超えた高回転(S17)でエンジンを停止させる場合、S19でエンジン回転数Neをアイドル回転数Neidへと低下させた後にエンジンを停止させるが、この際、モータの目標回転数tNmを所定の変化割合ΔNmで低下させ、モータ回転数Nmがこの目標tNmに追従するよう目標モータトルクtTmを定めてモータの制御をする。これにより、エンジン回転低下時における目標モータトルクtTmの変化量が、目標モータトルクtTmを音振許容トルク範囲内の値よりも大きくすることのない程度に抑制される。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車にて、実際のクラッチトルク特性の変化によってクラッチ操作部材の操作に対する「駆動輪に伝達される駆動トルク」の推移に変化が発生することの抑制。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。クラッチトルク基準特性(マップ)にクラッチ戻しストローク検出値を適用してクラッチトルク基準値が決定される。このクラッチトルク基準値と「EGの出力軸の駆動トルク検出値」とのうちで小さい方の値が「CT通過後基準EGトルク」として決定される。MGトルクは、CT通過後基準EGトルクから、M/Tの入力軸の駆動トルク検出値(CT通過後実EGトルク)を減じた値に調整される。これにより、CT通過後EGトルクの誤差が補償され得る。
(もっと読む)
車両の制御装置
【課題】 コースト走行時に安定した車両挙動が得られる車両の制御装置を提供すること。
【解決手段】 駆動輪に駆動力と回生制動力とを付与するモータと、各輪に摩擦制動力を発生するブレーキ手段と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、運転者に加速意図が無いときは運転者の制動要求に関わらずコースト回生制動力を付与するコースト回生制御手段と、運転者のブレーキ操作時に回生制動力の変化に応じて摩擦制動力を調整する協調回生制動の制御中に、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が第1所定値以上低下したときは、駆動輪の回生制動力を低下しつつ従動輪の摩擦制動力を増加させる協調回生制御手段と、前記車輪速検出手段により検出された従動輪車輪速よりも駆動輪車輪速が前記第1所定値よりも大きな第2所定値以上低下したときは、前記コースト回生制動力を小さくするコースト回生制動力変更手段と、を備えた。
(もっと読む)
トルク立上り予測方法およびエンジン始動方法
【課題】油浴状態で配設される油圧式摩擦係合装置の伝達トルクの立上り変化を高い精度で予測できるようにする。
【解決手段】K0クラッチを係合させてエンジンをクランキングする際に、そのK0クラッチの伝達トルクTK0が立ち上がる前の所定の積分時間TiA内に油圧シリンダに加えられるK0クラッチ油圧PK0の積分値Ipk0を算出し、そのK0クラッチ油圧積分値Ipk0および油温Toに基づいて伝達トルクTK0の立上り変化(応答時間tdおよび立上り勾配φ)を予測する。これにより、ピストンの動作遅れや油膜圧の存在に拘らず伝達トルクTK0の立上り変化を高い精度で予測でき、その伝達トルクTK0の立上り変化に伴う駆動力変動をモータジェネレータによって適切に抑制することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ノーマル運転パターンと判定される通常運転中でも、運転者が高応答運転モードを選択すると、ハイブリッド走行領域を拡大する。
【解決手段】高応答運転モードModehr選択中であって、動力性能重視運転パターンPat(PWR)および燃費重視運転パターンPat(ECO)の中間的なノーマル運転パターンPat(NOR)である場合、エンジン始動線として中間用エンジン始動線を選択し、Modehr選択中にノーマル運転パターンPat(NOR)である場合のハイブリッド走行領域を、燃費重視運転パターンPat(ECO)でのハイブリッド走行領域よりも拡大させる。このため、Pat(NOR)と判定される通常運転中でも、運転者がModehrを選択すると、エンジン動力を用いたハイブリッド走行が行われ易くなる。
(もっと読む)
車両の発進制御装置
【課題】 車両発進時のクラッチジャダーを抑制できる車両の発進制御装置を提供する。
【解決手段】 車両の発進時、モータジェネレータMGと左右後輪RL,RRとの間に介装した第2クラッチCL2をスリップ締結状態からロックアップ締結状態へと移行させる車両の発進制御装置において、クラッチジャダーの発生が予測または検出された場合には、予測または検出されない場合よりもスリップ締結状態からロックアップ締結状態への移行時間を短くする。
(もっと読む)
電動車両の制御装置
【課題】電動モータを回転数制御からトルク制御に切り替える際、加速側で切り替えレスポンスの向上を達成しながら、コースト減速中の切り替えに伴う捩れショックの発生を防止する。
【解決手段】ハイブリッド車両の制御装置は、モータジェネレータ2と、モータ制御切り替え手段としての統合コントローラ20と、遅れ処理手段としてのモータコントローラ22と、を備える。モータコントローラ22は、モータジェネレータ2の制御を回転数制御からトルク制御に切り替える際、モータトルク差分に対し、アクセル踏み込みによる加速側では、加速要求に適合する加速用変化量制限値によりモータトルク変化の遅れ処理を行なう。一方、アクセル足離しによるコースト減速中のときには、加速用変化量制限値よりも小さい値に設定したコースト用変化量制限値によりモータトルク変化の遅れ処理を行なう。
(もっと読む)
1 - 20 / 1,244
[ Back to top ]