
Fターム[5H115QE02]の内容
車両の電気的な推進・制動 (204,712) | 制御時の状態 (7,652) | 低速走行時 (267)
Fターム[5H115QE02]に分類される特許
1 - 20 / 267
電気自動車用の制御装置
【課題】車両接近を歩行者に気付かせることのできる電気自動車用の制御装置を提案する。
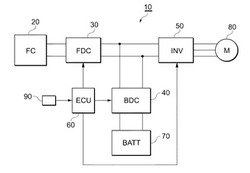
【解決手段】複数の電力変換器(30,40,50)は、それぞれのキャリア周波数に基づいてスイッチング素子を駆動制御することにより所望の電力変換動作を行う。電気自動車用の制御装置(60)は、車速が所定値未満の場合に、複数の電力変換器(30,40,50)のキャリア周波数を同期させ、作動音の音圧を上げる。
(もっと読む)
車両

【課題】モータジェネレータの回転速度を制限する。
【解決手段】車両は、運転者が操作するスイッチと、スイッチが操作されると停止するエンジンと、モータジェネレータと、エンジン回転速度がゼロから増大するとモータジェネレータの回転速度が減少するようにエンジンの出力軸とモータジェネレータの出力軸とを連結する動力分割装置と、スイッチを操作することによってスイッチエンジンが停止した状態でモータジェネレータの回転速度が増大した場合、エンジン回転速度がゼロから増大するように制御するECUとを備える。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための要求トルクを確保する。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、電力制御トルクを出力する余地を残すように設定されたMG1およびMG2のトルク上下限範囲から、駆動軸32aに発生できる駆動トルクのトルク上下限範囲を定める。そして、HVECU70は、当該トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように、MG1およびMG2のトルク指令値を設定する。
(もっと読む)
ハイブリッド自動車
【課題】こもり音の発生を回避しつつ、運転者や乗員に違和感を与えるのを抑制する。
【解決手段】車速Vが閾値Vref未満の低車速走行時にエンジンを燃費最適動作ラインで運転して車両要求パワーPe*を出力するとエンジンの運転ポイントがこもり音領域内となるときには、エアコン要求パワーPa*より小さな値の補正用パワーPalimをエアコン要求パワーPa*の代わりに用いて車両要求パワーPe*が小さくなるよう再設定(補正)し(S150)、この再設定(補正)した車両要求パワーPe*と燃費最適動作ラインからこもり音領域を回避して得られる実行用動作ラインを用いてエンジンの目標回転数Ne*や目標トルクTe*を設定すると共にモータMG1,MG2のトルク指令Tm1*,Tm2*を設定してエンジンやモータMG1,MG2を駆動制御する(S160〜S210)。
(もっと読む)
燃料電池車両
【課題】車速毎に定められた総合近接騒音量を過不足なく発生させることができる燃料電池車両を提供する。
【解決手段】燃料電池2と、燃料電池2に空気を供給するエアポンプ10と、燃料電池2に水素ガスを供給する水素タンク3と、燃料電池2で発電した電気を蓄電するバッテリ16と、システム内の温度を調整する温度調整手段と、自車の車速を判定する車速センサ23と、追加騒音を発生させるスピーカー20と、自車の車速が所定範囲にある場合にスピーカー20を作動して追加騒音を発生させる電子制御装置30と、を備えた燃料電池システム1を搭載した燃料電池車両であって、電子制御装置30は、燃料電池システム1の構成要素から生ずる燃料電池システム起因音量と、スピーカー20が発生する追加発生音量との和が、車速毎に定められた総合近接騒音量となるようにスピーカー20を制御する。
(もっと読む)
組電池及びこれを装備する電動車両
【課題】電池セルを積層しない状態で、絶縁性のセパレータを電池セルの定位置に固定し、セパレータでもって外装缶の表面の一部あるいは全体を絶縁して、電池セルの組み立て工程や取り扱いを極めて容易に、しかも安全にする。
【解決手段】組電池は、複数の電池セル1を絶縁性のセパレータ2を介して積層して、セパレータ2と電池セル1とを定位置に連結している。セパレータ2は、隣接する電池セル1の間に挟着される絶縁プレート部21の周囲に外周壁22を有し、この外周壁22の内側に電池セル1を嵌め込んで定位置に配置する箱形凹部23を設けている。さらに、セパレータ2は、外周壁22のコーナー部に、箱形凹部23に挿入される電池セル1のコーナー部を押圧して、箱形凹部23に挿入される電池セル1を箱形凹部23に固定する押圧固定部9を設けており、この押圧固定部9で、箱形凹部23に挿入される電池セル1をセパレータ2に固定している。
(もっと読む)
車両の駆動力制御装置
【課題】 アップシフト時の変速ショックを抑制すると共に、イナーシャトルクを有効に利用してエネルギー効率を向上できる車両の駆動力制御装置を提供する。
【解決手段】 車両は、エンジンENG、電動機MG、二次電池1、及び検知手段21cを有する駆動力制御装置21を備える。駆動力制御装置21は、アップシフト時のイナーシャ相中に、エンジンENGのイナーシャトルクが駆動輪に伝達されることを阻止するように、検知手段21cで検知されたイナーシャトルクに基づいて電動機MGで発電させて二次電池1に充電する回生を行なうか、又は電動機MGの駆動力を減少させる。
(もっと読む)
四輪駆動車の動力伝達装置及び動力伝達方法
【課題】四輪駆動状態と二輪駆動状態との切り換え機能、及び、高速レンジと低速レンジとの切り換え機能を有する四輪駆動車に対し、構成の簡素化及び小型化を図ることができる四輪駆動車の動力伝達装置を提供する。
【解決手段】遊星歯車機構30のキャリアCAをモータジェネレータ2の出力軸26に、リングギヤRをリヤプロペラシャフト51に、サンギヤSをフロントプロペラシャフト41にそれぞれ接続する。サンギヤSを車体側に固定可能とするスリーブ機構と、フロントディファレンシャルギヤ44と右側車輪4Rとの間のトルク伝達を遮断可能とするディスコネクト機構46とを備えさせる。スリーブ機構を解放状態とし且つディスコネクト機構46を係合状態とすることで4WD−Loモードを成立させる。スリーブ機構を係合状態とし且つディスコネクト機構46を解放状態とすることで2WD−Hiモードを成立させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】WSC走行モードとHEV走行モードが遷移する際の駆動トルクの段差を低減可能なハイブリッド車両の制御装置の提供を図る。
【解決手段】エンジンコントローラ11、モータコントローラ12、第1クラッチ2,第2クラッチ4を統合コントローラ15で作動制御して、EV走行モードとHEV走行モードとWSC走行モードを現出する。WSC走行モードの目標駆動トルクを、HEV走行モードの目標駆動トルクに対して、これら走行モードの切り換えによって生じるオフセットトルク分減算して設定することによって、モード遷移時の駆動トルクの段差が低減される。
(もっと読む)
電動車両の走行制御装置
【課題】高効率での電動車両モータ駆動制御を行い、低電費な電動車両向け走行制御装置を提供する。
【解決手段】電動車両の走行制御装置は、実車速とモータの力行及び回生に関する駆動状態とに基づいて、電費効果代をもたらすモータの制駆動に必要な最高効率モータトルクを演算する演算部と、アクセル開度及び実車速に基づいて、モータを最高効率モータトルクで制駆動させて車両を走行させる第1期間と、モータを制駆動させずに車両を惰行させる第2期間との期間配分を演算する演算部と、第1期間における走行と第2期間における惰行とが交互に繰り返されるように、モータをパルス状に制駆動するための目標モータトルクを演算する演算部と、目標モータトルクに応じてモータをパルス状に制駆動することにより車両の走行制御を行う制駆動ECUとを備える。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】前輪と後輪とを別々のモータで駆動する構成においてモータの発熱を的確に抑制しつつて走行安定性を確保する上で有利なハイブリッド電気自動車の制御装置を提供する。
【解決手段】フロントモータ18、リアモータ20のうち、一方のモータに分配される駆動トルクTrq1が一方のモータの基準トルクを超過したと判定された場合、他方のモータで駆動される車輪にスリップの発生が否と判定されたときに、一方のモータに分配される駆動トルクTrq1を基準トルクより低減させると共に他方のモータに分配される駆動トルクTrq2を増大させて要求トルクを満足させる。他方のモータで駆動される車輪でのスリップの発生が有と判定され、かつ、エンジンにより駆動される車輪と一方のモータにより駆動される車輪とが同じ車輪である際に、駆動トルクTrq2の増大を禁止して、エンジンに分配される駆動トルクを増大させて要求トルクを満足させる。
(もっと読む)
車両駆動装置
【課題】モータ、減速部、及び差動部を有する構成において車両搭載性を向上させることができる車両駆動装置を提供すること。
【解決手段】回転動力を出力するモータ21と、モータ21からの回転動力を減速して出力する減速部22と、減速部22からの回転動力を一対の車輪14、15に向けて分配して出力する差動部24と、モータ21と車輪14、15との間の動力伝達経路を断接する動力伝達機構23と、を備え、モータ21、減速部22、差動部24、及び動力伝達機構23は、車輪14、15の車軸方向の一軸上に並べて配置される。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間の摩擦係合要素をスリップ締結する時、運転者の要求通りの走行を実現することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ2と駆動輪7,7との間に介装され、モータ2と駆動輪7,7とを断接する摩擦係合要素(第2クラッチ)5をスリップ締結する時、入力回転数制御手段(図11)によって、目標駆動トルクが、車両発進が可能な釣り合い判定トルク以上では、摩擦係合要素5の入力回転数(目標MGトルク)を、目標駆動トルクが釣り合い判定トルク未満のときの入力回転数(目標MGトルク)に比べて大きな値に設定する。
(もっと読む)
車両の制御システム
【課題】複数のEV走行モードを有する車両でEV走行モードの使用制限の発生を抑えること。
【解決手段】電気エネルギを変換した機械エネルギを動力にして駆動力を発生させるモータ/ジェネレータ20の動力を用いた複数のEV走行モードの中から所望のEV走行モードを運転者に手動で選択させる走行モード選択装置(クラッチ50、クラッチペダル51及び変速操作装置71)と、夫々の前記EV走行モード毎に当該EV走行モードの出力制限を設定するハイブリッドECU100及びモータ/ジェネレータECU102と、を備えること。
(もっと読む)
物品搬送設備
【課題】搬送装置の搬送作動時にサーボ制御される電動モータを停止状態にて制動するときの電力の低減を図ることができながら、必要な搬送能力を維持することができる物品搬送設備を提供すること。
【解決手段】電動モータを制動する制動状態と制動を解除する解除状態に切換自在で、電力供給時に解除状態に、非供給時に制動状態に切り換える制動手段と、高負荷状態か低負荷状態かを判別する負荷状態判別手段とが設けられ、制御手段が、高負荷状態において、電動モータを停止状態に維持するときは、制動手段を解除状態にしかつ駆動制御手段によるサーボロックにて電動モータの回転作動を制動し、低負荷状態において、電動モータを停止状態に維持するときは、駆動制御手段による電動モータのサーボ制御を中断しかつ制動手段を制動状態に切り換えることで電動モータの回転作動を制動する物品搬送設備。
(もっと読む)
制御装置
【課題】出力部材の回転速度が比較的低い場合であっても、内燃機関始動制御の開始時における第二係合装置のスリップ開始判定を精度良く行うことができる制御装置の実現。
【解決手段】内燃機関11に駆動連結される入力部材Iと車輪15に駆動連結される出力部材Oとを結ぶ動力伝達経路上に、第一係合装置CS、回転電機12、第二係合装置C1、の順に設けられた車両用駆動装置1を制御対象とする制御装置3。回転電機12のトルクを車輪15に伝達しながら内燃機関11を始動させる内燃機関始動制御を実行可能に構成され、内燃機関始動制御を実行するために第二係合装置C1を完全係合状態からスリップ状態へ移行させるに際して、少なくとも低車速状態である場合に、ロータ12bの回転位置を検出する回転センサSe2の出力に基づく回転電機12の回転加速度の変化量がスリップ判定量以上となったときに第二係合装置C1がスリップを開始したと判定する。
(もっと読む)
電動乗用車両
【課題】道路の状況に応じて軽快に走行できる上に、発進時に急発進することを防止して運転者の安全を確保することのできる電動乗用車両を提供する。
【解決手段】前輪2又は後輪3の何れか一方が一輪で構成されるとともに、前輪又は後輪の何れか他方が一輪以上で構成され、前輪及び後輪のそれぞれが別個独立の電動モータM1、M2で駆動するように構成された乗用電動乗用車両において、前輪及び後輪の駆動を制御する制御手段13を備え、制御手段13は、現実の走行に必要な電動モータの出力トルクが予め設定された基準トルク値以下の状態で前輪又は後輪の何れか一方の電動モータを駆動し、現実の走行に必要な電動モータの出力トルクが基準トルク値よりも大きい状態で前輪及び後輪の電動モータを駆動するように構成されている。
(もっと読む)
自動変速機の変速制御方法および変速制御装置
【課題】発電により自動変速機に入力される走行トルクが減少しても良好な車両走行性能および良好な変速フィーリングが得られ、変速制御装置の記憶部や演算処理部の負担の増加を抑制できる自動変速機の変速制御方法を提供する。
【解決手段】エンジンと発電電動機と自動変速機と変速制御装置とを備えたハイブリッド車両用パワートレイン装置で、エンジンからの駆動により車両の走行と発電電動機の発電とを並行して実施するときの自動変速機の変速制御方法であって、発電電力に必要な発電トルクを演算する工程S5と、エンジンの出力トルクを演算する工程S6と、出力トルクから発電トルクを減算して車両の走行に使用される走行トルクを演算する工程S7と、走行トルクに基づいて補正した発電時スロットル開度を演算する工程S8と、発電時スロットル開度に基づいて自動変速機を制御する変速制御工程S9と、を有する。
(もっと読む)
車両の制御システム
【課題】EV走行モードからの切り替えを運転者に対して十分に促すこと。
【解決手段】エンジン10の動力を用いたエンジン走行モード、モータ/ジェネレータ20の動力を用いたEV走行モード、又はエンジン10及びモータ/ジェネレータ20の双方の動力を用いたハイブリッド走行モード、を運転者に手動で選択させる走行モード選択装置と、運転者が走行モード選択装置によりEV走行モードを選択した際の車速に応じてモータ/ジェネレータ20の出力特性を設定し、モータ/ジェネレータ20よりもエンジン10の運転効率の方が優れているときに当該モータ/ジェネレータ20からの出力を抑制又は禁止するハイブリッドECU100及びモータ/ジェネレータECU102と、を備えること。
(もっと読む)
パラメトリックスピーカ装置およびこれを搭載した車両
【課題】車両接近警告音用の第1超音波と対象物までの距離測定用の第2超音波との放射に共用可能としたパラメトリックスピーカ装置を提供する。
【解決手段】複数の超音波振動子4を含む振動子ユニット2aを配備し、その振動子ユニット2aから自己復調して可聴音となる超音波を送信するパラメトリックスピーカ装置であって、振動子ユニット2aを、上記可聴音発生のための第1超音波として送信する第1タイミングと、距離測定のための第2超音波を送受信する第2タイミングとに切り替えて駆動する。
(もっと読む)
1 - 20 / 267
[ Back to top ]