
Fターム[5H115QE13]の内容
車両の電気的な推進・制動 (204,712) | 制御時の状態 (7,652) | 後進時 (106)
Fターム[5H115QE13]に分類される特許
1 - 20 / 106
ハイブリッド自動車
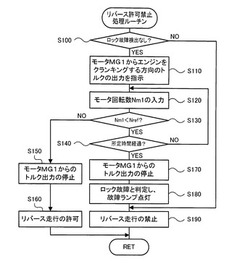
【課題】リバース走行する際に第1の電動機にロック故障が生じていないことを確かめた上でリバース走行を許可し、第1の電動機にロック故障が生じているときにリバース走行することによって内燃機関が逆回転して破損するのを防止する。
【解決手段】運転者がシフトレバーをリバース走行用のポジション(Rポジション)に変更したときにモータMG1からエンジンをクランキングする方向のトルクを出力し(S110)、所定時間が経過するまでにモータMG1の回転数Nm1が閾値Nref以上に至ったときにはモータMG1にロック故障が生じていないと判断してリバース走行を許可し(S160)、所定時間が経過するまでにモータMG1の回転数Nm1が閾値Nref以上に至らないときにはモータMG1にロック故障が生じていると判断してリバース走行を禁止する(190)。
(もっと読む)
車両の駆動力制御装置

【課題】 アップシフト時の変速ショックを抑制すると共に、イナーシャトルクを有効に利用してエネルギー効率を向上できる車両の駆動力制御装置を提供する。
【解決手段】 車両は、エンジンENG、電動機MG、二次電池1、及び検知手段21cを有する駆動力制御装置21を備える。駆動力制御装置21は、アップシフト時のイナーシャ相中に、エンジンENGのイナーシャトルクが駆動輪に伝達されることを阻止するように、検知手段21cで検知されたイナーシャトルクに基づいて電動機MGで発電させて二次電池1に充電する回生を行なうか、又は電動機MGの駆動力を減少させる。
(もっと読む)
電動車両の走行制御装置
【課題】高効率での電動車両モータ駆動制御を行い、低電費な電動車両向け走行制御装置を提供する。
【解決手段】電動車両の走行制御装置は、実車速とモータの力行及び回生に関する駆動状態とに基づいて、電費効果代をもたらすモータの制駆動に必要な最高効率モータトルクを演算する演算部と、アクセル開度及び実車速に基づいて、モータを最高効率モータトルクで制駆動させて車両を走行させる第1期間と、モータを制駆動させずに車両を惰行させる第2期間との期間配分を演算する演算部と、第1期間における走行と第2期間における惰行とが交互に繰り返されるように、モータをパルス状に制駆動するための目標モータトルクを演算する演算部と、目標モータトルクに応じてモータをパルス状に制駆動することにより車両の走行制御を行う制駆動ECUとを備える。
(もっと読む)
電動車両
【課題】正転・逆転のいずれか一方の回転方向のみに対して効率が高められた電動機を駆動力源として、生産性の低下やコストアップを招くことなく、効率を向上させることが可能な電動車両を提供すること。
【解決手段】少なくとも2つの電動機5,6を備えた電動車両Veにおいて、電動機5,6を、一方の回転方向への力行時における効率が他方の回転方向への力行時における効率および回生時における効率よりも高くなるように構成するとともに、後輪の駆動力を発生させる電動機6を、前進用電動機6として正転力行時における効率が逆転力行時における効率および回生時における効率よりも高くなるように配置し、前輪の駆動力を発生させる電動機5を、後進・回生用電動機5として逆転力行時における効率および回生時における効率が正転力行時における効率よりも高くなるように配置した。
(もっと読む)
電動車両の制御装置
【課題】モータジェネレータと駆動輪との間に設けられた締結要素のスリップ締結とロックアップとのハンチングの発生を抑制できる電動車両の制御装置を提供することこと。
【解決手段】車体速に対応したロックアップ判定閾値に基づいて、車体速がロックアップ判定閾値を越えると、第2クラッチをロックアップ状態とし、車体速がロックアップ判定閾値以下で、第2クラッチをスリップ締結状態とする締結要素制御部を備え、ロックアップ判定閾値としてのTCS時第1切替線L1tcsは、車体速がVset1以下の低速の領域では、車体速がVset2以上の高速の領域に比べて高く設定されていることを特徴とする電動車両の制御装置とした。
(もっと読む)
前後輪駆動車両
【課題】車両後進時における車両エネルギ効率の悪化を抑制可能な前後輪駆動車両を提供する。
【解決手段】後輪駆動装置1と前輪駆動装置6とを備えた車両3であって、後輪駆動装置1は、車両3の駆動力を発生する電動機2A、2Bと、電動機2A、2Bと後輪Wrとの動力伝達経路上に設けられ、解放又は締結することにより電動機2A、2B側と後輪Wr側とを遮断状態又は接続状態にする油圧ブレーキ60A、60Bと、電動機2A、2Bを制御するとともに油圧ブレーキ60A、60Bを制御するECU45と、電動機2A、2Bと後輪Wrとの動力伝達経路上に油圧ブレーキ60A、60Bと並列に設けられる一方向クラッチ50と、を備える。車両後進時には、少なくとも後輪駆動装置1に後進駆動力を発生させて後進させ、後輪駆動装置1に後進駆動力を発生させるときに、ECU45は油圧ブレーキ60A、60Bを締結して電動機2A、2B側と後輪Wr側とを接続状態にし、電動機2A、2Bを逆方向の回転動力が発生するよう駆動する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】動力伝達モードを切替可能なハイブリッド車両の運転効率を高める。
【解決手段】ハイブリッド車両の制御装置(100)は、内燃機関(200)及び電動機(MG1)を含む動力要素と、駆動軸(500)と、動力伝達機構(300)と、クラッチ(710)とを備えたハイブリッド車両を制御する。ハイブリッド車両の制御装置は、ハイブリッド車両が後進走行モードであるか否かを判定する後進判定手段(110)と、内燃機関が運転しているか否かを判定する内燃機関運転判定手段(120)と、クラッチの係合状態を検出する係合状態検出手段(130)と、ハイブリッド車両が後進走行モードであり、内燃機関が停止しており、クラッチが係合されていない場合に、クラッチを係合すると共に内燃機関を始動させるように制御する内燃機関始動手段(140)とを備える。
(もっと読む)
スタッカクレーン
【課題】走行作動と昇降作動とのそれぞれで適切な省電力化を図ることができるスタッカクレーンを提供すること。
【解決手段】制御手段が、走行台車が定格走行速度で走行し、かつ、昇降台が定格昇降速度で昇降するように搬送制御を実行する定格運転モードと、走行台車が、走行作動に関して省電力に適した省電力運転用走行速度で走行し、かつ、昇降台が、昇降作動に関して省電力に適した省電力運転用昇降速度で昇降するように、搬送制御を実行する省電力運転モードとに切り換え自在に構成されているスタッカクレーン。
(もっと読む)
車両用駆動制御装置
【課題】車両の急減速時に同期が不完全なまま噛合クラッチを接続することにより、異音が発生したり噛合クラッチが損傷したり或いは駆動力変動が生じたりすることを防止する。
【解決手段】噛合クラッチ42が遮断されたエンジン走行手段72による車両走行時に車速Vが低下し、駆動力源切換マップPmap に従って定められた接続車速以下になった場合でも、車両の減速度が所定値以上の急減速時には、ステップR3の噛合クラッチ接続制御の実行が阻止されて噛合クラッチ42が遮断状態に維持される。これにより、車両の急減速時に同期が不完全なまま噛合クラッチ切換アクチュエータ48により噛合クラッチ42を接続しようとして、異音が発生したり噛合クラッチ42が損傷したり或いは駆動力変動が生じたりすることが防止される。
(もっと読む)
電動車両のクリープカット制御装置
【課題】クリープトルク出力状態での逆方向移動を防止する制動時に、クリープカットの実行で違和感のあるトルク低下が発生するのを防止する。
【解決手段】前進クリープトルク出力状態で車両が、車速VSPの経時変化により示す後退方向へずり下がりを生じ、これを防止するための制動がt3に行われた場合において、後退方向へずり下がりを車速VSP<-V1により検知しt1、この状態がタイマ値NTM1に対応した設定時間だけ継続するときt2、クリープカット禁止フラグNFLAG=1によりクリープカットを禁止する。このため、上記の後退方向車両移動を防止するためのt3における制動開始により、t5に車速VSPが0近辺の値になったのを受けて、従来のクリープカット許可フラグFLAGが1にセットされても、これに呼応したクリープカットが行われることがなく、t5以降もクリープトルクを出力し続ける。
(もっと読む)
電動車両のクリープカット制御装置
【課題】クリープトルク出力状態で車速に係わるクリープカット許可が成立している間に制動力を増大させた時、クリープカットの実行で違和感のあるトルク低下が発生することのないクリープカット制御を提案する。
【解決手段】前進クリープトルク出力状態で車速VSPがV1未満のクリープカット禁止車速域に入り(t1)、この状態がタイマ値NTM1に対応した設定時間だけ継続するとき(t2)、クリープカット禁止フラグNFLAG=1によりクリープカットを禁止する。このため、車速VSPが0近辺であって車速に係わるクリープカット許可条件が成立している間に、制動力がクリープカット許可制動力以上となって制動力に係わるクリープカット許可条件が成立し(t3)、これを受けて、t4にクリープカット許可フラグFLAGが1にセットされても、これに呼応したクリープカットが行われることがなく、t4以降もクリープトルクを出力し続け、t4にクリープカットの実行により違和感のあるトルク低下が発生するのを防止することができる。
(もっと読む)
階段昇降式移動車
【課題】階段を安定性良く昇降できる階段昇降式移動車を提供する。
【解決手段】リンク駆動手段が、4節リンク機構式の車輪支持体SLにおける4つのリンク連結箇所が直線状に並ぶ直線姿勢のときに4つのリンクL1〜L4のうちの進行方向前方側に位置する2つのリンクの1つを基準とした状態で、そのリンクに対して平行姿勢を維持するリンクを上方側に回動させたのち前方側に回動させて直線姿勢となるように操作するリンク回動駆動、並びに、4つのリンク連結箇所が直線状に並ぶ直線姿勢のときに4つのリンク連結箇所のうちの前後方向の中間に重複して位置する2つのリンク連結箇所を中心とする状態で、進行方向前方側に位置する2つのリンクと進行方向後方側に位置する2つのリンクとを屈伸操作するリンク屈伸駆動を行うように構成されている。
(もっと読む)
ハイブリッド車両の駆動装置
【課題】内燃機関と第1、第2の回転電機を備えると共に、走行用の回転電機が故障しても走行を継続でき、後進時に走行用の回転電機で走行できると共に、急速発電が必要な場合に走行中の発電も可能にするハイブリッド車両の駆動装置を提供する。
【解決手段】エンジン(内燃機関)12から出力される駆動力が入力される第1入力軸14と、2個の回転電機16,20のいずれかから出力される駆動力が入力される第2入力軸22と、サンギヤSとキャリアCとリングギヤRからなる3つの要素のいずれかからなる第1要素が第1入力軸14、第2要素が第2入力軸22、第3要素が出力軸24にそれぞれ連結される遊星歯車機構26と、第1入力軸14と第2入力軸22の接続を断接するクラッチ30と、第1要素を装置ハウジング10aに固定可能な2WAYC32と、エンジン12などの動作を制御するECU34を備える。
(もっと読む)
車両用ハイブリッド駆動装置
【課題】発進クラッチが遮断されたモータ駆動走行モードから充電制動走行モードへ移行した場合でも、効率良くバッテリーを充電できるとともに大きな制動力が得られるようにする。
【解決手段】発進クラッチ26が遮断されたモータ駆動走行モードでの走行中にブレーキペダルが踏込み操作された場合に、前輪側要求制動力に対応する必要発電トルクTyoukyuが第2モータジェネレータMG2の最大発電トルクTMG2max を超える時には、その発進クラッチ26を締結し、第1モータジェネレータMG1および第2モータジェネレータMG2を何れも発電制御して上記前輪側要求制動力を発生させるとともに、得られた電気エネルギーでバッテリー46を充電する。これにより、2つのモータジェネレータMG1およびMG2を有効に用いてバッテリー46を効率よく充電できるとともに、大きな制動力が得られるようになり、エネルギー効率が向上する。
(もっと読む)
共鳴型非接触受電装置の位置決め支援装置および共鳴型非接触受電装置の位置決め方法
【課題】ワイヤレスでの受電状態の良好さの程度を精度良く検出し、位置決めすることが可能な共鳴型非接触受電装置の位置決め支援装置を提供する。
【解決手段】制御装置180は、自己共振コイル112の位置の検出開始後の初期段階に、位相検波器116で測定した測定値をメモリ181に記録し、メモリ181に記録した測定値に対して現在位相検波器116で測定した測定値の符号が反転するまで初期段階よりも自己共振コイルの位置を目標方向に移動させるための制御を実行し、位相検波器116で測定した測定値の符号が反転してから受電電圧センサ190で測定した受電電圧VRに基づいて自己共振コイル112の位置合わせを行なうための制御を実行する。
(もっと読む)
DC/DCコンバータ制御装置
【課題】DC/DCコンバータ制御装置に関し、間欠駆動を有効に利用して、補機用バッテリの充電量は確保しつつ、エネルギ効率の向上を図ることができるようにする。
【解決手段】DC/DCコンバータ6と、DC/DCコンバータ6を連続駆動又は間欠駆動モする制御手段10とを備え、制御手段10は、連続駆動要求条件が成立しているか否か判定する駆動要求判定手段11と、一定時間におけるDC/DCコンバータ6の駆動時間を積算し、該積算値の一定時間に対する比率を算出し、この比率を予め設定された閾値と比較判定する駆動比率判定手段13と、連続駆動要求条件が成立しているとこの間は連続駆動モードを選択し、連続駆動要求条件が成立していなくても比率が閾値未満であると判定された場合には所定時間だけ連続駆動モードを選択し、その他の場合には、間欠駆動モードを選択するモード選択手段12と、を有する。
(もっと読む)
ハイブリッド駆動装置
【課題】コーンリング式CVTをハイブリッド駆動装置に適用し、装置全体としてコンパクトな配置とする。
【解決手段】入力側摩擦車22をエンジン出力軸と同軸の第1軸Iに配置し、出力側摩擦車23を第2軸IIに配置し、電気モータ2を第1軸、第2軸に平行な第3軸IIIに配置する。電気モータ2とコーンリング式CVT3を軸方向に一部が重なるように配置する。第3軸IIIは、軸方向からみて、リング25が最も該リングに囲まれていない摩擦車23の軸心II側に移動した際のリングの中心tを通り、第1軸Iと第2軸IIとを結ぶ線p−pに垂直な線v−vより、リングに囲まれていない摩擦車23側に配置される。
(もっと読む)
車両用駆動装置の制御装置
【課題】2つの入力軸を備えたツインクラッチ式変速機構において電動機が接続されていない入力軸を介して走行中であっても、電動機が接続された入力軸に連結されたエアコン用コンプレッサを適切に作動する。
【解決手段】偶数段走行中には、エアコン用コンプレッサ回転数がエアコン用コンプレッサ要求回転数となるように、(i)ロック機構61又は第1変速用シフター51をニュートラルにするとともに第1主軸11をモータ7で回転させるか、(ii)ロック機構61又は第1変速用シフター51を接続して少なくともエンジン6で第1主軸11を回転させるか、又は(iii)ロック機構61又は第1変速用シフター51をニュートラルにするとともに第1クラッチ41を締結して第1主軸11を少なくともエンジン6で回転させるか、を選択してエアコン用コンプレッサ112を作動可能とする。
(もっと読む)
車両の駆動力制御装置
【課題】自動変速機の変速時に放出されるイナーシャトルクを電動モータで効率よく回生すると共に、回生トルクによって変速ショックを緩和するようにする。
【解決手段】運転者が変速機7の変速モードを手動変速モードにセットした後、アップシフト操作を行うと、駆動力制御ユニット14は、変速機7の入力軸7aに作用するエンジン1からのイナーシャトルクTMiを求め、このイナーシャトルクTMiを所定に配分されたモータトルク指示値TMから減算して目標モータトルクTMtrを設定する。変速機制御ユニット13はエンジン1の出力軸1aと変速機7の入力軸7aとの間に介装されている電動モータ4のトルクが目標モータトルクTMtrとなるように制御する。目標モータトルクTMtrからはエンジン1から放出されるイナーシャトルクTMi分のトルクが減算されているため、イナーシャトルクTMiが減衰されて変速ショックが緩和される。
(もっと読む)
車両用駆動装置の制御装置
【課題】エアコンの駆動要求がある場合にもドライバビリティを悪化させずに効率の良い運転が可能な車両用駆動装置の制御装置を提供する。
【解決手段】車両用駆動装置1の制御装置2であって、A/C要求トルクを決定するエアコン要求トルク決定手段2aと、駆動力要求トルクを決定する駆動力要求トルク決定手段2bと、A/C要求トルクと駆動力要求トルクを足し合わせたトータル要求トルクを満たすようにエンジン6とモータ7の運転点を決定する運転点決定手段2cと、を備え、運転点決定手段2cは、エンジン6の運転効率に基づいてエンジン6とモータ7のそれぞれの運転点を決定する。
(もっと読む)
1 - 20 / 106
[ Back to top ]