
Fターム[5H115TB03]の内容
車両の電気的な推進・制動 (204,712) | 速度検出 (3,622) | 速度検出器によるもの (3,504) | 車輪に設けたもの (647)
Fターム[5H115TB03]の下位に属するFターム
非駆動輪に設けたもの (12)
Fターム[5H115TB03]に分類される特許
1 - 20 / 635
電気自動車
【課題】 車両の運転を急激に妨げることなく、モータを温度管理し、適切な対処が迅速に行える電気自動車を提供する。
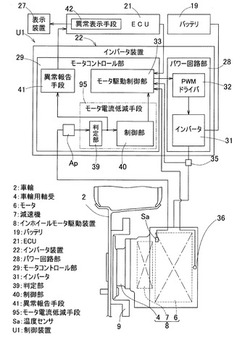
【解決手段】 この電気自動車は、車輪2を駆動するモータ6と、このモータ6を制御する制御装置とを備えている。前記モータ6のモータコイルに、このモータコイルの温度Tcを検出する温度センサSaを設け、この温度センサSaで検出される温度Tcが閾値を超えたとき、この温度Tcを時間tで微分したdTc/dtが0以下になるまでモータ6の電流値を低減するモータ電流低減手段95を設けた。
(もっと読む)
電気自動車

【課題】 車両の運転を急激に妨げることなく、インバータの過熱による特性変化および損傷を防止し、モータ駆動の制御特性の変化や、モータ駆動の不能を防止することができ、適切な対処が迅速に行える電気自動車を提供する。
【解決手段】 この電気自動車は、車輪2を駆動するモータ6と、ECU21と、直流電力をモータ6の駆動に用いる交流電力に変換するインバータ31を含むパワー回路部28およびECU21の制御に従って少なくともパワー回路部28を制御するモータコントロール部29を有するインバータ装置22とを備えている。インバータ31に、このインバータ31の温度Tcを検出する温度センサSaを設け、温度センサSaで検出される温度Tcが閾値を超えたとき、温度Tcを時間tで微分したdTc/dtが0以下になるまでインバータ31に与える電流指令に制限を加えるインバータ制限手段95を設けた。
(もっと読む)
電気自動車
【課題】 モータが制御系のノイズ等で誤動作した場合に、瞬時にこれを判断して安全処置を採ることができる電気自動車を提供する。
【解決手段】 ECU21の出力するトルク指令と、モータ6またはこのモータ6で駆動される車輪2,3の回転信号、回転方向信号、およびモータ電流のいずれかとを常時監視し、この監視した情報を基に、定められた規則に従ってモータ6の誤動作を検出する誤動作検出手段37を設ける。この誤動作検出手段37で誤動作が検出されると前記モータ6への駆動電流の停止、および機械式ブレーキ9,10による制動のいずれかまたは両方を行わせる誤動作対応制御手段38を設ける。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車にて、実際のクラッチトルク特性の変化によってクラッチ操作部材の操作に対する「駆動輪に伝達される駆動トルク」の推移に変化が発生することの抑制。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。クラッチトルク基準特性(マップ)にクラッチ戻しストローク検出値を適用してクラッチトルク基準値が決定される。このクラッチトルク基準値と「EGの出力軸の駆動トルク検出値」とのうちで小さい方の値が「CT通過後基準EGトルク」として決定される。MGトルクは、CT通過後基準EGトルクから、M/Tの入力軸の駆動トルク検出値(CT通過後実EGトルク)を減じた値に調整される。これにより、CT通過後EGトルクの誤差が補償され得る。
(もっと読む)
車両の駆動装置
【課題】とくに径方向に嵩張らない画期的な構造のモータを使用し、モータが径方向に嵩張らないようにして最低地上高を確保しつつ、左右の駆動輪の駆動に必要なトルクを発生する。
【解決手段】左右の駆動輪2l、2rを駆動するモータ8が、ソレノイド部3から左右それぞれに延びた左右の分配磁路部材6l、6rと、左右の分配磁路部材の分枝した複数の端部が外周に配置されて回転界磁を形成し、駆動輪2l、2rそれぞれを駆動するロータ4l、4rと、左右の分配磁路部材6l、6rそれぞれの相間を磁気的に調整する左右の磁束調整手段5l、5rとを備え、ロータ4l、4rの内周や外周にステータを配置しないようにして径方向に嵩張らない画期的な構造に形成し、最低地上高を確保しつつ、左右の駆動輪2l、2rの駆動に必要なトルクを発生する。
(もっと読む)
車両の制御システム
【課題】運転者の感じる減速度の違和感を抑えること。
【解決手段】機械エネルギを動力とするエンジン10、電気エネルギを変換した機械エネルギを動力とするモータ/ジェネレータ20、及びエンジン10と駆動輪WL,WRとの間の動力伝達を断接可能なクラッチ50を備えた車両の制御システムにおいて、減速の際に、エンジン10のエンジンブレーキによる制動力と車両の走行抵抗による制動力の内、車両の減速特性に及ぼす影響の大きい何れか一方の制動力の車速低下に伴う出力特性に相似させてモータ/ジェネレータ20による回生制動力を発生させること。
(もっと読む)
電気自動車
【課題】快適な操作性能を確保するとともに、走行安定性に優れた電気自動車を提供する。
【解決手段】電気自動車1は、前輪側の左右輪に制駆動力を伝達する前輪用モータ3fと、後輪側の左右輪に制駆動力を伝達する後輪用モータ3rと、前輪用モータ3fを駆動する前輪用インバータ8fと、後輪用モータ3rを駆動する後輪用インバータ8rとを備え、前輪用モータ3f及び後輪用モータ3rは、車体の中心25aに対して線対称又は点対称に配置され、前輪用インバータ8f及び後輪用インバータ8rは、前輪用モータ3f及び後輪用モータ3rが線対称に配置されているときは線対称に配置され、前輪用モータ3f及び後輪用モータ3rが点対称に配置されているときは点対称に配置された。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車について、運転フィーリングを通常MT車の運転フィーリングに一致させたいという要求を考慮しながらエネルギー効率(燃費)を向上すること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。MGトルクが車両減速側の回生トルクに調整されている状態において、運転者によるクラッチペダル操作によりクラッチが完全分断状態に移行したとき(t2)、回生トルクの大きさが「ゼロより大きい微小値A」まで減少させられ、その後、微小値Aに維持される。クラッチの完全分断状態への移行に伴って回生トルクが直ちにゼロに調整される場合と比べて、回生により発生するより多くのエネルギーをバッテリに蓄えることができ(ドットで示した領域を参照)、エネルギー効率(燃費)が向上する。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御時、マスターシリンダ圧発生開始ポイントのメカバラツキ影響を排除した制動目標値を設定することにより、良好なブレーキフィーリングと回生エネルギーの確保を達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、マスターシリンダ13と、ホイールシリンダ4FL,4FR,4RL,4RRと、VDCブレーキ液圧ユニット2と、モータコントローラ8と、統合コントローラ9と、を備える。統合コントローラ9は、ブレーキ操作時、目標減速度を基本液圧分と上乗せ制動分(回生分と加圧分)で達成する回生協調ブレーキ制御を行う。そして、ブレーキ操作によりマスターシリンダ圧の発生が開始されるブレーキペダルストローク位置を検出し、検出された実マスターシリンダ圧発生開始ポイントでの目標減速度が、上乗せ制動分の最大値(回生ギャップ)になるように、ストローク変化に対して滑らかに変化する目標減速度特性を設定する(図4)。
(もっと読む)
ハイブリッド電気自動車の回生制御装置
【課題】惰行運転時においてエンジン減速モードとモータ減速モードとの間の制動力の格差に起因する減速感の相違を解消した上で、モータ減速モードでは電動機の回生制御により最大限の発電量を実現できるハイブリッド電気自動車の回生制御装置を提供する。
【解決手段】モータ減速モードによる車両の蛇行運転時において、エンジンと電動機との間のクラッチを切断して、電動機の回生トルクを最大トルクライン上で制御することにより車両の減速エネルギの全てを回生発電に利用すると共に、最大トルクライン上におけるエンジンブレーキ近傍の回生トルクが得られる電動機の回転域でシフトダウンを実行することにより、エンジン減速モードと同様に減速感を実現する。
(もっと読む)
車両用駆動装置
【課題】ガタ詰めトルクが付与されている状態で運転モードが切り換えられる際に、電子制御式のブレーキ装置を用いることなくガタ詰めトルクに起因して運転者に違和感を生じさせることを防止する。
【解決手段】駐車モードでガタ詰めトルクが付与されている状態で他の運転モードへ切り換えられることにより、そのガタ詰めトルクと反対方向の駆動トルク(クリープトルク)を付与する場合(P→RシフトまたはP→Dシフト)、或いはそのガタ詰めトルクを0にする場合(P→Nシフト)には、そのガタ詰めトルクが0になるまでパーキングロック装置46によるパーキングロックが維持されるため、駐車モード時のガタ詰めトルクが前輪42L、42Rに伝達されて運転者に違和感を生じさせる恐れがない。
(もっと読む)
車両用駆動装置の制御装置
【課題】エンジンからの動力を駆動輪へ出力し差動用電動機により差動状態が制御される差動機構を備えた車両用駆動装置において、車両のスリップ時にも非スリップ時にもエンジンの駆動制御を適切に行うことができる車両用駆動装置の制御装置を提供する。
【解決手段】ハイブリッド制御手段86は、基本的には、出力回転部材19の実回転速度である差動部実出力回転速度に基づいてエンジン8を制御する。そして、車両6のスリップ時には、上記差動部実出力回転速度に替えて、実際の車速Vに対応する車速基準出力回転速度に基づいてエンジン8を制御する。従って、上記スリップ時にエンジンパワーが不必要に大きくならないようにエンジン8の駆動制御を適切に行うことができる。また、基本的にはエンジン8は出力回転部材19の実回転速度に基づいて制御されるので、車両6のスリップ時以外でもエンジン8の駆動制御を適切に行うことができる。
(もっと読む)
電気駆動車両
【課題】車両のピッチング振動を大きくさせることなく駆動輪のスリップを抑制できる電気駆動車両を提供すること。
【解決手段】電動機1,4と、電動機により駆動される駆動輪3,6と、駆動輪にスリップが発生するときに電動機のトルクを低減させ、当該スリップ解消後に電動機のトルクを回復させる電動機制御装置40とを備えた電気駆動車両において、車両に発生するピッチング振動の振幅を検出するピッチング検出装置26を備え、スリップ解消後に電動機制御装置が一定時間に回復させる電動機のトルク量は、ピッチング検出装置で検出された振幅Aが判定値A1以下の場合と判定値A1を超える場合とで異なっている。
(もっと読む)
電動車両の走行制御装置
【課題】高効率での電動車両モータ駆動制御を行い、低電費な電動車両向け走行制御装置を提供する。
【解決手段】電動車両の走行制御装置は、実車速とモータの力行及び回生に関する駆動状態とに基づいて、電費効果代をもたらすモータの制駆動に必要な最高効率モータトルクを演算する演算部と、アクセル開度及び実車速に基づいて、モータを最高効率モータトルクで制駆動させて車両を走行させる第1期間と、モータを制駆動させずに車両を惰行させる第2期間との期間配分を演算する演算部と、第1期間における走行と第2期間における惰行とが交互に繰り返されるように、モータをパルス状に制駆動するための目標モータトルクを演算する演算部と、目標モータトルクに応じてモータをパルス状に制駆動することにより車両の走行制御を行う制駆動ECUとを備える。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力するモータと、前記モータと駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチのモータ側の回転数が前記クラッチの駆動輪側の回転数よりも所定量高い回転数となるように前記モータを回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記モータの実トルクを検出するトルク検出手段と、車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から前記モータの実トルクが変化しなくなる油圧である終了指令油圧まで低下させた後、前記初期指令油圧以下であって、かつ、前記終了指令油圧より高い補正後指令油圧に設定する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
車両の制御装置
【課題】 クラッチの劣化を抑制しつつ、運転性を向上可能な車両の制御装置を提供すること。
【解決手段】 車両の駆動力を出力する駆動源と、前記駆動源と駆動輪との間に介装され指令油圧に基づいて伝達トルク容量を発生するクラッチと、前記クラッチをスリップ制御すると共に、前記クラッチの駆動源側の回転数が前記クラッチの駆動輪側の回転数よりも所定量高い回転数となるように回転数制御する走行モードと、車両停止状態を判定する車両停止状態判定手段と、前記駆動源の実トルクを検出するトルク検出手段と、前記走行モード中に車両停止状態と判定されたときは、前記指令油圧を初期指令油圧から低下させて、該低下に伴う前記駆動源の実トルク変化が終了したと判定したときの指令油圧を補正後指令油圧として出力する車両停止時伝達トルク容量補正手段と、を備えた。
(もっと読む)
車両の制御装置
【課題】スロットルバルブ13およびクランク角検出手段35,36が付設された多気筒型エンジン1を搭載した車両の制御装置100,200において、エンジン始動毎のクランク角計測基準位置の検出タイミングのばらつきを無くす。
【解決手段】クランキング開始によりエンジン回転数Neが始動判定値X以上になったときにエンジン1が始動したと判定する始動判定手段と、エンジン1の始動判定後に要求のエンジン回転数Neを確保するために必要な吸入空気量を算出する吸入空気量算出手段と、クランキング開始から所定時間以内にクランク角検出手段35,36からクランク角計測基準信号を受けたときに前記始動判定手段による処理を実行させずに待機し、クランキング開始から前記所定時間の経過後にクランク角計測基準信号を受けたときに前記始動判定手段による処理を実行させる始動制御手段とを実行する。
(もっと読む)
電動車両の制御装置
【課題】モータと駆動輪の間の摩擦係合要素をスリップ締結する時、運転者の要求通りの走行を実現することができる電動車両の制御装置を提供すること。
【解決手段】本発明の電動車両の制御装置は、走行駆動源となるモータ2と駆動輪7,7との間に介装され、モータ2と駆動輪7,7とを断接する摩擦係合要素(第2クラッチ)5をスリップ締結する時、入力回転数制御手段(図11)によって、目標駆動トルクが、車両発進が可能な釣り合い判定トルク以上では、摩擦係合要素5の入力回転数(目標MGトルク)を、目標駆動トルクが釣り合い判定トルク未満のときの入力回転数(目標MGトルク)に比べて大きな値に設定する。
(もっと読む)
車両の制御装置
【課題】 駆動輪スリップが生じた場合であっても、車両としての走行性や安定性が確保可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 モータと駆動輪との間に介装されたクラッチをスリップ制御すると共に、モータをクラッチの駆動輪側回転数よりも所定量高い目標モータ回転数となるように回転数制御する走行モードのときに、車体速に所定スリップ量を加算した目標モータ回転数の上限回転数を設定することとした。
(もっと読む)
車両用ブレーキ装置
【課題】回生協調制動を行うと共に、回生制動の過剰使用に起因してABSが頻繁に作動してしまうことを抑制する。
【解決手段】前後輪の車輪速の最大値と前輪の車輪速の最小値との差および車体速度から相対スリップ率を求め、相対スリップ率が大きくなるほど減少する回生制動の係数を求めて、回生制動を行う。相対スリップ率の大きさが大きいほど回生制動の大きさを抑制する制御を行うことから、車両の前後方向や左右方向への荷重移動量を監視しなくても、回生制動が大きく効き過ぎることを防止でき、回生制動に起因する回生制動から油圧制動への不要な切換を防止でき、回生制動を有効に働かせることができる。
(もっと読む)
1 - 20 / 635
[ Back to top ]