
Fターム[5H180CC11]の内容
Fターム[5H180CC11]に分類される特許
141 - 160 / 544
車間距離制御装置
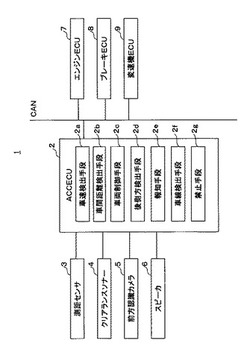
【課題】より快適な運転フィーリングを実現することができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速Vを検出する車速検出手段2aと、自車両と先行車両との車間距離Lを検出する車間距離検出手段2bと、車速Vを設定車速VSに制御する及び車間距離Lを車速Vで除して算出された車間時間Tを設定車間時間TSに制御する車両制御手段2cと、自車両の後側方の他車両を検出する後側方検出手段2dと、車間距離Lが車線変更を行うために必要な所定車間距離LC以下となった場合で、後側方検出手段2dが自車両の後側方の他車両を検出しない場合に、車線変更時期を報知する報知手段2eを備えることを特徴とする。
(もっと読む)
追従走行制御装置

【課題】ドライバに負担をかけることなくドライバの意思に沿ったアダプティブクルーズコントロール(ACC)の追従走行が行えるようにする。
【解決手段】セットスイッチ7を操作してACCの追従走行を開始することにより、車速センサ4が検出した自車1の車速と、カメラ6、制御処理部2により取得された走行中の道路の制限速度とに基づき、制御処理部2により、追従走行制御の上限車速をその道路の制限速度又は現在の自車1の車速に設定し、ドライバが走行中の道路の制限速度内で追従走行することを望んでいるときには、走行中の道路の制限速度内で先行車に追従走行するように自車1の走行を制御し、ドライバが走行中の道路の制限速度を超える現在の車速で追従走行することを望んでいるときには、走行中の道路の制限速度を超えた現在の速度で先行車に追従走行するように制御する。
(もっと読む)
車両走行補助装置
【課題】ヘッドライトのような照明手段の照明方向を適切に制御することで、道路区画線の画像認識精度を向上させることができる車両走行補助装置の提供。
【解決手段】本発明による車両走行補助装置は、車両前方の道路を撮像する撮像手段と、前記撮像手段の撮像画像から画像認識された道路区画線に基づいて、車両が車線を維持して走行するように制御するレーンキープ制御手段と、車両前方を照明する照明手段であって、照明方向を電子制御可能な照明手段と、前記レーンキープ制御手段によりレーンキープ制御が実行される場合に、車両の走行車線に係る道路区画線の位置に基づいて、前記照明手段の照明方向を制御する照明方向制御手段とを備えることを特徴とする。
(もっと読む)
駐車支援システム
【課題】駐車場マップを予め用意せずに、走行路と駐車空きスペースとの区別を行うことで、駐車しようとする車両を駐車空きスペースに導く駐車支援システムを提供する。
【解決手段】 駐車場を走行中の車両における車両側方の外部物体までの計測距離を示す側方距離情報に基づいて、走行中の車両によって規定される車両走行路を含む駐車場の空間マップを作成する空間マップ作成部32と、空間マップに基づいて車両走行路と駐車空きスペースと駐車済みスペースとを区分けした駐車状態情報を作成する駐車状態情報作成部33と、駐車しようとする車両に駐車状態情報を提供する駐車状態情報提供部34とを備える駐車支援システム。
(もっと読む)
車両用周辺監視装置
【課題】低速走行時に、自車両の運転者に、自車両の周囲の物体に関する情報をより有効に与える車両用周辺監視装置を提供する。
【解決手段】監視距離が遠くなるに従い監視角度が狭くなる距離測定部24a〜24dを備えた車両用周辺監視装置10において、検知領域変更部18は、車速検出部17が検出した自車両の車速が閾値以下であるときに、注視方向判定部16が検出した運転者Dの視線方向については、距離測定部24a〜24dの監視角度を自車両の車速が閾値を超えるときに比べて広くするため、駐車時等の低速走行時において、運転者Dが凝視しているバンパーの角やホイール周辺については、より広い監視角度が得られることになり、運転者Dはバンパーやホイールが全体として壁等と接触するか否かが判るため、低速走行時に自車両の運転者Dに自車両の周囲の物体に関する情報をより有効に与えることができる。
(もっと読む)
車両用衝突安全制御装置
【課題】衝突安全制御をより適切に行なうことが可能な車両用衝突安全制御装置を提供すること。
【解決手段】車両前方の障害物を検出するための障害物検出手段(10)と、該障害物検出手段の出力に基づき車両前方の障害物との衝突可能性を判定する衝突可能性判定手段(40)と、を備え、該衝突可能性判定手段の判定結果に基づき種々の衝突安全制御を行なう車両用衝突安全制御装置(1)であって、前記衝突可能性判定手段は、前記障害物検出手段の出力に対して複数の基準を適用して前記衝突可能性を判定する手段であり、前記複数の基準を用いた判定履歴に基づいて前記衝突可能性を修正することを特徴とする。
(もっと読む)
車両用情報表示装置及び情報表示方法
【課題】 運転者の感覚に合致した形態で且つ意味に一貫性のある情報を表示し、運転者の情報に対する違和感や混乱を低減することができる車両用情報表示装置を提供する。
【解決手段】 車両用情報表示装置は、自車両周囲に存在する物体までの距離と、自車両が走行する走行車線における位置と、自車両が走行する走行環境とに基づいて、自車両が走行している運転場面が、予め定められた複数の運転場面のうちのいずれかであることを運転場面決定部14によって決定し、決定した運転場面に応じて、自車両周囲に存在する物体までの距離又は自車両が走行する走行車線における位置のいずれかを、運転者に提示する提示情報の内容として提示情報決定部15によって決定し、決定した提示情報を、視覚情報提示部16を介して運転者に視覚的に提示する。
(もっと読む)
車両の運転支援装置
【課題】 簡単な構成の映像によって、運転支援を可能にする。
【解決手段】 (a)に示すように、車両1が後進して駐車位置40に駐車する際の支援として、後方の映像に重ねて、進行予測曲線5aとともに、車幅を平行に延長したガイドライン5bを表示する。ガイドライン5bによって、車両の向きを確認することができる。(b)に示すように、後方映像に重ねて、進行予測曲線5aのみ表示したり、(c)に示すように、後方映像のみ表示するように、切換えることもできる。運転者が見やすい表示状態を選択すれば、選択状態を記憶し、次回の駐車アシスト動作での切換状態に反映させることができる。
(もっと読む)
隊列走行システム
【課題】隊列の全体の消費エネルギーを小さくすることができるようにする。
【解決手段】自車位置を検出する現在地検出部と、自車10の走行状態を表す車両情報を検出する車両情報検出部47と、周辺車両11からの周辺車両情報を取得する周辺車両情報取得処理手段と、自車位置、車両情報及び周辺車両情報に基づいて隊列を編成する隊列編成処理手段と、編成された隊列で隊列走行を行う隊列走行処理手段と、前方を走行する直近の周辺車両11の車両属性情報に基づいて、高さ調整装置49を作動させ、自車10の高さ変量を変更する高さ調整処理手段とを有する。自車10の高さ変量が変更されるので、自車10の前方を走行する直近の周辺車両11の投影面内に自車を置くことができる。自然風及び走行風によって自車が受ける風圧を低くすることができる。
(もっと読む)
近傍車両監視装置
【課題】自車両の近傍を走行する車両であって、自車両に関係があると推測される車両に関する情報を自車両の搭乗者に通知できる近傍車両監視装置を提供すること。
【解決手段】自車両の近傍を走行する近傍車両を監視する近傍車両監視装置100は、車車間通信を利用して近傍車両に関する情報を収集する近傍車両情報収集手段2と、自車両の近傍を走行した時間を近傍車両毎に計測する近傍車両監視手段10と、自車両の近傍を走行した時間が所定時間以上である近傍車両に関する情報を出力する近傍車両情報出力手段11と、を備える。
(もっと読む)
隊列走行システム
【課題】隊列の全体の消費エネルギーを小さくすることができるようにする。
【解決手段】自車情報を取得する自車情報取得処理手段と、周辺車両11についての周辺車両情報を取得する周辺車両情報取得処理手段と、自車情報及び周辺車両情報における、自車10及び周辺車両11から成る各車両の投影面積を読み込み、投影面積に基づいて隊列を編成する隊列編成処理手段とを有する。自車10及び周辺車両11から成る各車両の投影面積に基づいて隊列が編成されるので、風の流れ方向における下流側の車両が、上流側の車両の陰に置かれ、自然風及び走行風によって各車両が受ける風圧を低くすることができる。隊列の全体からみた場合、各車両が受ける空気抵抗を最も小さくすることができる。
(もっと読む)
交差点衝突事故防止装置
【課題】本発明の課題は、超音波レーダにより交差点に接近中の車両、自転車、歩行者などの移動物体を検出して出会い頭の衝突の危険がある場合に発光や警告音などにより注意を喚起し、交差点における交通の安全性を向上する交差点衝突事故防止装置を提供することにある。
【解決手段】本発明は、道路の交差点に設けられ、各方向からの移動物体の接近をそれぞれ対応して検出する複数の超音波レーダの超音波センサ12〜23と、前記超音波レーダの超音波センサ12〜23が2方向以上からの移動物体の接近を検出すると光及び音を発生する発光装置24〜27及び警報装置30とを具備することを特徴とするものである。
(もっと読む)
周辺監視装置、安全走行支援システム、及び車両
【課題】他車両との間で、車両の周辺監視情報をやり取りして、他車両での自車両の検出(監視)状況が考慮された、より適切な車両制御を実行させることができる周辺監視装置を提供すること。
【解決手段】自車両の周辺状況を監視する手段で検出された周辺監視情報を含む自車情報を取得する自車情報取得部13と、他車両で検出された周辺監視情報を含む他車情報の受信処理、及び取得した自車情報の送信処理の制御を行う通信制御部14と、取得した自車情報と受信した他車情報とに基づいて、他車両での自車両の検出状況を解析する検出状況解析部15と、検出状況解析部15により解析された他車両での自車両の検出状況が考慮された車両制御情報を出力する制御情報出力部17とを装備する。
(もっと読む)
緊急車両検出装置、緊急車両検出方法および緊急車両検出プログラム
【課題】報知対象となる人物に対して確実に異常の報知を行うことができなかった。
【解決手段】複数の車両の位置を示す車両位置情報を取得し、前記複数の車両のそれぞれに搭載された音声取得部にて取得された緊急車両の出力音によって特定される、前記緊急車両と前記複数の車両のそれぞれとの距離を示す距離情報を取得し、前記車両位置情報と前記距離情報とに基づいて、前記複数の車両の位置および前記緊急車両と前記複数の車両のそれぞれとの距離に整合する前記緊急車両の位置を取得する。
(もっと読む)
運転支援装置及び運転支援方法
【課題】運転者の自信度に応じた態様により運転支援を行う。
【解決手段】運転者の運転技量を判断する運転技量判断手段30と、運転者の主観的評価に基づく運転技量に対する自信度を判断する自信度判断手段40と、判断された運転技量と自信度に基づいて、情報取得手段10を介して取得した運転支援情報を提供する際の態様を決定する提供態様決定手段50と、決定された態様により運転支援情報を運転者に提供する提供手段60とを備える。
(もっと読む)
車両制御装置
【課題】交差点の右左折後に追従走行制御等を再開させるための入力操作を不要とすることが可能な車両制御装置の提供。
【解決手段】本発明に係る車両制御装置は、車速を自動的に制御する車速自動制御手段と、前記車速自動制御手段による車速自動制御をオンさせるための入力手段とを備え、前記車速自動制御手段は、車速自動制御がオン状態である状況下で、車両が交差点を右左折する場合には、車速自動制御のオン状態を維持することを特徴とする。
(もっと読む)
障害物警告装置、障害物警告方法及びコンピュータプログラム
【課題】車両周辺に位置する障害物の方位を乗員に正確に把握させることを可能とした障害物警告装置、障害物警告方法及びコンピュータプログラムに関するものである。
【解決手段】運転者の運転意思を検出した場合に運転席25から全方位にあるスピーカ8〜13から音を出力し、その後、自車両の周囲に他車両等の自車両に対して接近する障害物を検出した場合に、自車両と障害物との位置関係を取得し、取得した位置関係に基づいて障害物から最も遠い位置にあるスピーカから順に音の出力を停止し、最終的に障害物から最も近い位置にあるスピーカのみから音の出力を行うように構成する。
(もっと読む)
注意喚起システム及びプログラム
【課題】前方車両が二輪車である場合に、運転者の注意を十分に喚起することができるようにする。
【解決手段】現在地検出部と、自車の前方を監視する前方監視部と、前方監視部による監視結果に基づいて、自車の前方を走行している二輪車が検出されたかどうかを判断する車両判定処理手段と、二輪車が検出された場合、自車位置より前方の道路情報を取得する道路情報取得処理手段と、道路情報に基づいて路面状態を判定する路面状態判定処理手段と、路面状態の判定結果に基づいて二輪車の走行状態を判定する前方車両走行状態判定処理手段と、二輪車の走行状態の判定結果に基づいて警告を行う警告処理手段とを有する。二輪車が検出された場合、路面状態の判定結果に基づいて警告が行われるので、運転者の注意を十分に喚起することができる。
(もっと読む)
交通信号制御機
【課題】横断歩道の歩行者用灯器とその横断歩道に交差する道路の車両用の信号灯器との同時青灯色点灯を検出して交通事故を防止することができる交通信号制御機を提供する。
【解決手段】マイクロホン112は、歩行者用灯器が出力する誘導音を検出して得られた電気信号をAD変換部113へ出力する。AD変換部113は、電気信号をデジタル値に変換する。制御部111は、デジタル値と予め選択された音響波形パターンとが一致又は近似するか比較し、歩行者用灯器が青色点灯しているか否かを判定する。制御部111は、歩行者用灯器が青色点灯していると判定した場合、歩行者用灯器と信号灯120の青色灯121が同時に点灯しているか否かを判定し、同時点灯している場合、赤色灯123を赤点滅(閃光動作)させる。
(もっと読む)
周辺監視装置
【課題】周囲の状況を考慮した周辺監視および監視結果通知を行う周辺監視装置を提供すること。
【解決手段】本発明にかかる周辺監視装置は、自装置が搭載された車両の側方の物体までの距離を算出することにより車両の周囲状態を検出する周囲状態検出部12と、自装置が搭載された車両の前方の撮影画像に基づいて、車両前方に存在する歩行者を検出する歩行者検出部13と、を備え、歩行者検出部13は、周囲状態検出部12による距離算出結果が所定のしきい値以下の場合、歩行者検出精度を上げるようにしている。
(もっと読む)
141 - 160 / 544
[ Back to top ]