
Fターム[5H180CC11]の内容
Fターム[5H180CC11]に分類される特許
61 - 80 / 544
後方視認装置
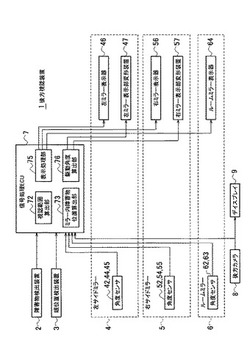
【課題】障害物の確認がより的確に可能になる後方視認装置を提供する。
【解決手段】 視認範囲算出部72は、眼位置検出装置3が検出した運転者の眼位置と、各角度センサ42,44,45,52,54,55,62,63の検出信号に基づいて、ルームミラー6で視認できる範囲を左サイドミラー4及び右サイドミラー5へ表示するための視認範囲算出、及び左サイドミラー4及び右サイドミラー5で視認できる範囲をルームミラー6へ表示するための視認範囲を算出する。表示処理部75は、視認範囲を表示信号に変換して、左ミラー表示器46、右ミラー表示器56,ルームミラー表示器64へ出力する。
(もっと読む)
運転支援装置

【課題】簡単な構成の映像によって、運転支援を可能にする。
【解決手段】 表示画面で、車両イラスト70にカメラ像の方向71や範囲72を併せて表示する。これによって、どのカメラユニット10による映像の表示かを判りやすく表示することができる。さらに、ステアリング7の切り角に応じて車両イラスト70の向きを変えるようにすれば、映像と進行方向との関係も判りやすく表示することができる。
(もっと読む)
車間距離検出装置および車速制御システム
【課題】超音波を用いた車間距離検出装置において、計測の精度を向上させる。
【解決手段】自車200の前部に設置され、先行車300に対して超音波Sを送信するとともに、先行車300で反射して戻った超音波S′を受信する超音波送受信機10と、超音波Sが超音波送受信機10から送信されてから、反射波としての超音波S′が受信されるまでの経過時間ΔTを計時する計時手段30および経過時間ΔTに基づいて先行車300との間の車間距離Lを算出する距離演算部50を有する距離算出装置20と、を備え、距離算出装置20は、反射波として受信した超音波S′のうち、路面(500)から反射して受信したノイズ成分(S2′)を除去するノイズ信号除去手段40を備え、距離演算部50は、ノイズ信号除去手段40によって除去された後の超音波S′についての経過時間ΔTに基づいて、車間距離Lを算出する。
(もっと読む)
経路推定装置及び運転支援装置
【課題】ドライバに煩わしさを感じさせることなく車両が安全に走行できるように運転支援を行う。
【解決手段】運転支援装置は、車両の現在位置を検出する自車測位装置13と、車両の挙動を検出する自車挙動計測装置11と、現在位置j、時間k、予測位置i、挙動bをそれぞれ離散化した場合の各々の組み合わせについて、車両が現在位置jで挙動bの状態である場合に時間k経過後に予測位置iにいる確率pを示した確率データを記憶する記録媒体21と、検出された現在位置において車両が検出された挙動である場合に、記録媒体21に記憶された確率データに基づいて、検出された現在位置から所定時間までに確率pが所定の閾値以上となる予測位置を車両経路として推定する自車経路推定装置41と、推定された車両経路を車両が走行すると障害発生の可能性がある場合に、警報を発生することで運転支援を行う支援インタフェース装置50と、を備えている。
(もっと読む)
眠気検出装置
【課題】 運転者の浅い眠気を高精度に検出することができる眠気検出装置を提供する。
【解決手段】 眠気検出装置1は、生理指標計測器2により運転者の心拍または脈拍を計測して心拍特徴量を抽出し、心拍特徴量の標準偏差値を求め、その心拍特徴量の標準偏差値を心拍特徴量で補正する。このとき、ナビゲーション3の情報、周囲環境認識センサ4及び乗員検知センサ5の出力データに基づいて自車両の走行環境情報を取得し、自車両が市街地、カーブ路、走行経験の無い道路、交差点の何れかを走行するとき、自車両の周囲に移動体が存在するとき、自車両に同乗者が乗っており且つ運転者が体を動かしているときには、心拍特徴量の標準偏差値の補正を行わないようにする。そして、補正された心拍特徴量の標準偏差値を用いて、運転者に浅い眠気があるかどうかを判定する。
(もっと読む)
車両用周辺監視装置
【課題】車両周辺に存在する障害物を検知して表示させる場合に、自車両に対する障害物の移動方向の区別をユーザがより容易に行うことを可能にする。
【解決手段】障害物センサ1で一旦障害物を検知した場合に、当該障害物の検知データを経時的に取得する制御装置4と、制御装置4で経時的に取得した検知データを累積して格納する記憶装置とを備え、制御装置4が、記憶装置5に記憶されている新旧の複数の検知データをもとに、この新旧の複数の検知データに対応する新旧の複数の表示マークを撮像画像に重畳してディスプレイ3で表示させるとともに、表示マークの新旧の区別が可能となるように個々の表示マークの大きさおよび透過率を変化させてディスプレイ3で表示させる。
(もっと読む)
劣化検知システム及び劣化検知方法
【課題】路側機の通信性能の劣化を検知することができ、故障して通信不能となる前にメンテナンスを可能とさせる劣化検知システムを提供する。
【解決手段】交通状況取得部15は、道路に設置された車両感知器7から得られる感知器情報に基づいて受信エリアA内の交通状況に関する交通状況情報を取得する。予測部16は、取得された交通状況情報に基づいて、受信エリアA内に存在している車載機2から発信された無線信号を、路側機1が所定期間内に受信する受信予定回数Qを予測する。劣化検出部17は、受信予定回数Qと実際に受信した実受信回数Rとを比較することによって、路側機1の通信性能の劣化を推定する。
(もっと読む)
警報地点学習装置
【課題】 ドライバへの警報に関するドライバの負担を軽減できる警報地点学習装置の提供。
【解決手段】 車両位置検出部2で検出した警報が行われた地点の位置情報、及びその地点で警報を発するかどうかを判定するための警報判定値を記録するメモリ52と、警報装置1と車両位置検出部2の検出結果、警報装置判定処理部51判定結果、及びメモリ52に記憶された情報に基づいて警報する地点を学習する警報地点学習部53と、を備える。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の状況に応じて車両周辺の対象物を適切に検出することができる車両周辺監視装置を提供すること。
【解決手段】車両周辺が撮像されている撮像画像を画像処理して対象物を検出する車両周辺監視装置において、車両周辺の他車両の存在を検出する他車両検出手段15と、他車両検出手段15の検出結果に応じて撮像画像中の画像処理の対象となる画像領域を変更する変更手段16とを備える。
(もっと読む)
受信装置および音声ガイドシステム
【課題】利用者が向いている方向にある施設のガイド情報を音声で案内する音声ガイドシステムを提供する。
【解決手段】街路の交差点に案内板4を設置する。案内板4は、各方位別のガイド情報を超音波帯域の複数チャンネルで特定方向に送信する。通行人10、11、12は、それぞれ受信装置であるガイド端末を装着している。ガイド端末は、超音波のガイド情報の到来方向に基づいて自装置(通行人)の向いている方向を検出し、複数チャンネルからその方向のチャンネルを選択して、受信・再生する。これにより、通行人が向いている方向の施設等を案内するガイド情報を自動的に再生することができる。
(もっと読む)
車体透過表示装置
【課題】表示部周囲の実景と自然につながった、運転者が楽に周辺画像を目視することのできる映像を提供する。
【解決手段】運転者50の視線方向であり、車両40を構成するフェンダー41によって運転者50の死角となる死角領域を撮影する第1カメラ11と、第1カメラ11の撮像映像をキャプチャーする映像入力部13と、第1カメラ11の画角と、運転者50の視野とをマッチングさせる視野角変換部14と、マッチング処理の行われた撮像映像を運転者50の視線に対して正対する映像に変換する射影変換部15と、運転者50の視線方向であり、死角領域を形成するフェンダー41上に配置された表示部30と、表示部30への画像表示を制御する表示制御部16を備える。
(もっと読む)
運転支援装置
【課題】簡単な構成の映像によって、運転支援を可能にする。
【解決手段】車両1が駐車場2に後進して駐車しようとする際に、白線3などで区画された駐車位置に正確に駐車できるように駐車アシストを行う。カメラ10から取得した複数の方向の映像とともに、映像が車両1に対してどの方向の範囲に対応するかを識別可能なイラスト及び文字で表示する表示制御手段を備え、車両1の運転者に見えにくかったり、死角となる映像をデイスプレイ4に表示し、進路予測曲線やガイドラインとともに、駐車場2での運転操作に対して分かりやすい支援を行う。
(もっと読む)
車両用運転支援装置
【課題】 運転支援装置において、警告手段によって警告される距離が、運転者別及び/又はシーン別にカスタマイズできるようにすることである。
【解決手段】 車両1の前側バンパ5の中央部及び左右のコーナー部と、車両1の後側バンパ7の中央部及び左右のコーナー部にそれぞれ距離センサ6,8を取り付ける。車両1の走行中に、距離センサ6,8によって計測された障害物までの距離を、予め設定された第1及び第2の閾値と比較し、その比較結果に基づいて運転者に警告を発する。そして、運転者に通常の運転を妨げる要因(例えば、天候や夜間運転)が存するときは、カスタマイズされた運転支援モードで支援されるようにする。
(もっと読む)
車間距離制御装置
【課題】自車両が被牽引車両を牽引する場合に安全な制動距離を確保することができると共に、走行安定性を高めることができる車間距離制御装置を提供すること。
【解決手段】自車両と先行車両との車間距離を制御する車間距離制御装置10において、自車両が被牽引車両を牽引しているか否かを判定する判定手段12と、自車両と先行車両との目標車間距離を判定手段12の判定結果に応じて決定する車間距離決定手段14と、自車両の目標加減速度を判定手段12の判定結果に応じて決定する加減速度決定手段16と、目標車間距離及び目標加減速度に基づいて自車両を制御する制御手段18とを備える。
(もっと読む)
車両用警告装置
【課題】自車両の側方に存在する車外の人に、右左折する車両の運転者がその人を認識しているか否かを通知できる車両用警報装置を提供すること。
【解決手段】自車両の側方に存在する車外の人に車両の右折又は左折を警告する車両用警告装置100において、車両の走行状況に応じた車両情報を取得する車両情報取得手段25と、車両情報から自車両が右折又は左折する可能性を予測する右左折予測手段26と、運転者の顔画像を撮影する撮影手段21と、顔画像を画像処理して得られた顔向き角度に基づき、運転者が側方を十分に視認したか否かを推定する視認度推定手段23と、十分に視認していないと推定された場合、側方に存在する車外の人に右折又は左折することを警告する警告手段24と、を有することを特徴とする。
(もっと読む)
情報収集装置、情報収集方法及び情報収集用プログラム
【課題】バックカメラのみでは認識できない範囲の危険を事前に察知して車両の安全運行に資することが可能な情報収集装置等を提供する。
【解決手段】車両1に搭載され、車両1の外部を撮像するバックカメラ10と、車両1の外部の音を集音するバックマイク13と、撮像された外部に相当する外部画像を車両1内に搭載されたディスプレイ11に表示すると共に、集音された音に相当する外部音をスピーカ15を用いて車両1内に放音する制御部12とを備え、バックマイク13における集音可能範囲ARが、バックカメラ10における撮像可能範囲Rを含み且つ撮像可能範囲Rよりも広い集音可能範囲ARとされている。
(もっと読む)
交差点走行支援システム、走行支援システム、および車載装置
【課題】交差点周辺の交通状況に即して適切に信号機を切り替えることができ、且つ、低コストで構成できる交差点走行支援システムを提供する。
【解決手段】車載の周辺障害物監視装置51の検出結果から、歩行者(移動物体)がいるために予想時間(T01)右左折不可である旨を示す通行状況判断情報を右左折車両が生成し、信号機側無線機102へ送信する。これにより信号機制御部100は、流出路を横断する移動物体により予想時間右左折不可である車両が交差点にいることを知ることができ、その状況に応じて信号切り替え制御を行う。信号の切り替え制御に用いる上記通行状況判断情報は周辺障害物監視装置51の検出結果から生成しており、この周辺障害物監視装置51としては、車両の運転支援用のセンサ等を利用することが可能なので、交差点走行支援システムを低コストで構成することができる。
(もっと読む)
駐車場管理システム
【課題】不正出場や機器のトラブルによって在車数のカウントがずれてもこれを容易または確実に修復できるようにし、また不正出場車両を抑制できるようにする。
【解決手段】車両入場時に車両を撮影してナンバープレートに記載された車両のナンバーを示すナンバー情報を在車データベース46に記憶する。その後に、在車データベース46に同一のナンバー情報があるかどうかを調べ、同一ナンバー情報がある場合には、入庫時刻が最新のナンバー情報を在車データベース46に残し、他の同一ナンバー情報を在車残りデータベース48に移動する。同一ナンバー情報について在庫残りデータベース48への移動が所定回数以上行われた場合には、当該ナンバー情報に対応する車両に警告を発する。また、不正出場車両のドライバの画像を記憶する。
(もっと読む)
無人航空機のナビゲーションのためのシステム及び方法
【課題】無人航空機(UAV)の航行のためのシステム及び方法を提示する。
【解決手段】好ましい一つの実施形態では、UAVは、少なくとも1つの飛行コリドー及び飛行経路を用いてコンフィギュレーションが行われ、第1のUAV飛行計画が計算される。第1のUAV飛行計画の運行中に、UAVは障害物を視覚的に検出し、この障害物を回避するように第2のUAV飛行計画を計算する。更に、第1又は第2のUAV飛行計画の運行中に、UAVは未知の航空機を音響的に検出し、この未知の航空機を回避するように第3のUAV飛行計画を計算する。加えて、UAVは、地上管制局から受信した情報などのような他の情報に基づいて、新しい飛行計画を計算することもできる。
(もっと読む)
情報提供装置
【課題】運転者が自車両後方の安全を確認しているときであっても、自車両前方に関する情報を運転者に提供することが可能な情報提供装置を提供する。
【解決手段】視線計測装置51が、自車両VMのドライバー10が自車両VM後方の安全を確認していることを検出し、視線計測装置51が、ドライバー10が自車両VM後方の安全を確認していることを検出したときに、ディスプレイ71及びスピーカー72が自車両VM前方に関する情報をドライバー10に提供する。これにより、ドライバー10が自車両VM後方の安全を確認しているときであっても、自車両VM前方に関する情報をドライバー10に提供することが可能となる。
(もっと読む)
61 - 80 / 544
[ Back to top ]