
Fターム[5H180CC17]の内容
Fターム[5H180CC17]の下位に属するFターム
路面中のループコイルを利用するもの (79)
磁石を利用するもの (31)
Fターム[5H180CC17]に分類される特許
81 - 92 / 92
ゴルフ場における距離及び方向の測定表示装置
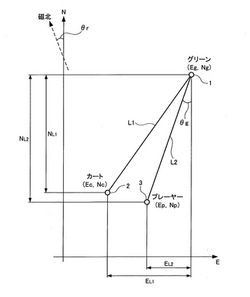
【課題】 ゴルフ場における携帯式子機のディスプレイに、グリーンまでの距離のみならずグリーンの方向をも表示して各プレーヤーに容易に知らせることができるようにする。
【解決手段】 各ゴルフプレーヤー3が携行することができる携帯測定表示装置に、衛星測位システムを利用して携帯測定表示装置からグリーン1までの距離と真北Nに対するグリーン1の方位θgとを求める手段と、磁北に対する携帯測定表示装置の方位を求める手段と、真北と磁北との偏角θrにもとづき、磁北に対する携帯測定表示装置の方位と真北に対するグリーン1の方位θgとから、携帯測定表示装置に対するグリーン1の方向を求める手段と、このグリーンの方向及び前記グリーンまでの距離を表示する手段とを設けた。
(もっと読む)
車両用経路案内装置

【課題】 自車位置の前方にある案内事象より目的地側に案内事象が存在した場合に、両案内事象が近いような場合でも、ユーザーが操作することなく、前記自車位置の前方にある案内事象の通過時点で案内できるようにする。
【解決手段】 制御回路8は、前方に料金所があって、目的地側に分岐ポイントがある場合、料金所と分岐ポイントとの距離が所定距離以下のときには、前記料金所を通過した時点で前記分岐ポイントに対する案内を行なう。
(もっと読む)
駐車場管理システム
【課題】 駐車場の不正駐車の検知が容易にして、かつ車両の盗難防止を行うことができる駐車場の有効利用を図る。
【解決手段】 各駐車スペース毎に設けられ、駐車スペースに駐車した車両の検知する車両センサー11を有し、その検出信号を発信する駐車場車両検知装置10と、駐車スペースの利用者が所持し、駐車スペースの利用状態に基づく情報を管理コンピュータに申告して登録を行う端末機30と、上記各利用者の登録情報、駐車スペースから送られる車両の駐車検知情報、上記利用者から送られる入出庫申告情報、各駐車枡における駐車履歴情報とをそれぞれ記憶する外部記憶装置25とを有する管理コンピュータ20とからなり、利用者が駐車スペースを利用する際に申告した入出庫情報と、駐車スペースから送られる車両の駐車検知情報に基づいて、入出庫申告情報に反する車両の入出庫があれば、不正駐車又は盗難の可能性があると判断し、その旨を示す信号を発信する。
(もっと読む)
車両の道路適応走行制御装置
【課題】 自車両の進行方向の道路状況を的確に把握し、適切な走行支援を行う。
【解決手段】 道路形状認識部26は、地図データ記憶部14に格納された地図データと、外界監視装置11の検知結果とに基づき、自車両の進行方向の道路形状を認識する。道路状況推定部27は、道路形状認識部26にて認識した道路形状を走行する他車両に対して、対象物走行情報抽出部21にて抽出された走行情報や道路状態および対象物走行軌跡算出部22にて算出された走行軌跡に基づき、自車両が走行予定の道路の道路状況を推定する。走行情報比較部30は、道路状況推定部27にて推定した道路状況を適正に通過可能な適正車両状態(適正速度VS)と自車両の走行状態(現在速度VP)とを比較し、走行支援判定部31は、自車両の走行状態が適正車両状態になるように制動装置16および警報装置17を作動させる。
(もっと読む)
車両の接触回避制御装置
【課題】 自車両と他車両との接触を回避するべく自車両の走行を支援する際に、適切な走行支援を実行する。
【解決手段】 危険性判定部24は、接触回避制御動作の作動状態において、例えばカーブや登坂路の頂上付近等での道路形状に起因して他車両が一時的に外界監視装置11の検知領域から逸脱した場合や、例えば外界監視装置11に異常が発生した場合や、障害物が存在する場合等に、対象物位置・走行軌跡算出部23にて自車両から他車両までの距離の検知が不可になると、対象物走行軌跡算出部21から入力される他車両の走行軌跡と、自車両の走行軌跡とに基づき、他車両の危険度を判定する。
(もっと読む)
障害物検出装置の動作を制御するシステムと方法
【課題】 自動車の車外障害物/乗員検出装置を制御するシステムと方法を提供する。
【解決手段】 本発明のシステムは、車外障害物検出装置(4)と、電子システム(6)と、状態検出手段(7)とを有する。車外障害物検出装置(4)は、自動車の周囲の所定の観測領域に入った障害物を検出する。状態検出手段(7)は、自動車のドアの開閉状態を検出し、電子システム(6)と協働する。これにより電源(5)を制御する。選択的事項として、乗員検出装置(8)と傾斜状態検出装置(9)がこのシステムに含まれ、制御動作が行われている間、それらの出力が考慮に入れられる。本発明のシステムは、駐車した時の車の傾斜状態に応じて観測領域を変える。
(もっと読む)
携帯電話を通して目標位置の方向を取得するための方法
本発明は、携帯電話を通して目標位置の方向を取得するための方法を開示するものであって、携帯電話は、現在位置の地理的情報及び目標位置の地理的情報を取得する過程と、携帯電話の画面に表示されるこの地理的子午線の角度及び現在位置の地理的子午線を決定する過程と、携帯電話は、現在位置の地理的情報及び目標位置の地理的情報に従って現在位置から目標位置への方向を決定する過程と、この方向と地理的子午線との間の仰角を決定する過程とを含む。その画面上に表示される地理的子午線の角度とその仰角とに従って、携帯電話は、現在位置から目標位置への携帯電話の画面上に表示される方向を決定し、表示方向に従って画面上の目標位置の方向を表示する。本発明は、ユーザに目標位置の方向を提供できない既存の携帯電話の問題を解決する。ユーザは、携帯電話を通して目標位置の方向を確認することができる。 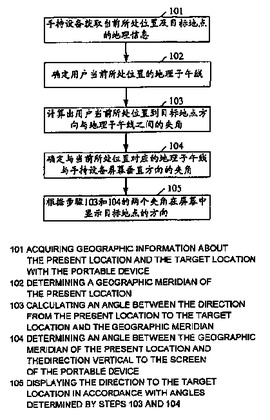 (もっと読む)
(もっと読む)
自動車の死角内の物体の存在を磁気的に検出するシステム及び方法
本発明は、自動車の死角内の物体の存在を磁気的に検出するためのシステム及び方法に関する。本発明のシステムは、死角に侵入する強磁性物体によって生じる地磁場の歪みを検出するための第1手段(1)、車両の軌道、傾斜及び/又は振動に、並びに車両内部に発生する磁場に誘起される磁気歪みを検出する第2手段(2)、第3手段(3)、及び第4手段(4)を有し、前記手段は全て電子回路(5)に接続されている。本発明によると、軌道、傾斜及び/若しくは振動、又は車両内部に発生する磁場を、特定の状況による対応する磁場の歪みに関連付けるテーブルが生成される。本発明の方法は、前記システム及びテーブルを用いて、前記可能な磁気歪みの物体検出への影響を中和する。
 (もっと読む)
(もっと読む)
近接センシングシステム
大型の公共車両または商用車両のような車両のミラーハウジング部品の内部または近傍に取り付けられるかもしれない車両近接センシングシステムであって、車両の前面の近くにある障害物を検知する。たとえば、外部後方ミラーの下または運転者に見えない場所にある障害物を検知する。そして制御信号を同一車両の運転手台内に送信して、警告装置を使って運転者に警告する。 (もっと読む)
移動体検出システム
【課題】送信すべき情報に基づく電界を電界伝達媒体に誘起させるとともに電界伝達媒体に誘起された電界を検出して情報の送受信を行うトランシーバを利用することにより、移動体の位置を正確に検出することができる移動体検出システムを提供する。
【解決手段】移動体検出システム100は、複数の発信装置110i(i=a,…,n)、検出装置120、及び観測装置130を備えており、自動車の移動方向に対して複数の発信装置110i及び検出装置120を適宜間隔をおいて路面に設置し、該路面上を通過する自動車を検出して、該自動車の長さを測定するコンピュータシステムである。これは、トランシーバ9を用いることにより、自動車10のタイヤが路面上の発信装置110i及び検出装置120の電極に同時に接しているときは、発信装置110iと検出装置120間の自動車10を介した通信路が成立することによるものである。
(もっと読む)
車両の方位指示装置
【課題】車両内の方位変動要因により、方位算出処理部から出力される方位信号が頻繁に切り換わり、方位表示装置の表示がちらつき(ハンチング)、見る者に不信感を与えることになるという課題があった。
【解決手段】方位算出処理部にヒステリシス特性を持たせ、車両側の方位変動要因によって、前記ヒステリシス特性を変更することを特徴とする。
(もっと読む)
自動車の走行制御装置
【課題】自車が先行車に追従して第1目標車速付近で走行するときに車体の前後方向の加減速を頻繁に受けず、乗り心地を向上できる。
【解決手段】定速走行用車速設定部27により設定される自車の第1目標車速と車間距離用車速設定部28により設定される自車の第2目標車速とを比較して低い方の車速が自車の最終目標車速とするように制御される。第1目標車速V1から減速して所定の目標車間距離になるように自車の最終目標車速を第2目標車速に切換えるときに、V1からV1−αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。また第2目標車速から加速して上記第1目標車速になるように自車の最終目標車速を切換えるときに、V1からV1+αまでの範囲では、現時の自車の最終目標車速を切換えないように制御される。
(もっと読む)
81 - 92 / 92
[ Back to top ]