
Fターム[5H180CC24]の内容
Fターム[5H180CC24]に分類される特許
81 - 100 / 328
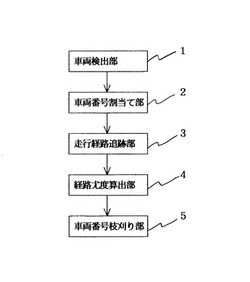
車両追跡装置及び車両追跡方法
【課題】 追跡対象の車両オブジェクトと車両番号との時間的な連続性が途絶えることを防止しつつオクルージョンに対して頑健で高精度かつ高効率な車両追跡が可能な車両追跡装置を得る。
【解決手段】 道路画像から個々の車両をオブジェクトとして検出する車両検出部1と、この検出された個々のオブジェクトに対して複数の車両番号を割当てる車両番号割当て部2と、車両番号割当て部により割当てられた車両番号の各々に基づいて走行経路を追跡する走行経路追跡部3と、行経路追跡部により得られた追跡経路情報から各経路の確率的な確からしさを尤度として算出する経路尤度算出部4と、車両番号割当て部により割当てられた車両番号のうち経路尤度算出部により算出された尤度が小なる経路に対応した車両番号を削除する車両番号枝刈り部5とを含むことを特徴とする。
(もっと読む)
レーン判定装置及びレーン判定プログラム、並びにそれを用いたナビゲーション装置

【課題】画像認識等に基づく自車レーンの判定を行うことができない不明区間を通過する際に、当該不明区間を退出後の自車レーンを絞り込むための判定処理を適切に選択し、効率的で精度の高い自車レーンの判定を行うことができるレーン判定装置を提供する。
【解決手段】各レーンを区画する区画線の形態を表す区画線形態情報を取得する区画線形態情報取得手段と、自車両の周囲の区画線を画像認識し、当該区画線の形態の組み合せに基づいて自車レーンを判定する走行レーン判定手段と、不明区間がある場合に、不明区間を退出後の道路の複数本の区画線の形態の組み合せが、走行レーン判定手段によって自車レーンを単一に特定可能な組み合せであるか否かを判定するレーン特定可否判定手段と、レーン特定可否判定手段による判定結果に基づいて、退出レーンを判定するための処理を、複数の判定処理の中から選択して実行する退出レーン判定手段と、を備える。
(もっと読む)
障害物検出装置
【課題】自車両が走行する道路上の障害物を誤検出することなく的確に検出することができる障害物検出装置を提供する。
【解決手段】自車両が走行する道路上の障害物が環境認識センサであるミリ波レーダ3、カメラユニット4、ナビゲーションシステム5の検出情報に基づいて検出されると、その検出情報により特定される障害物の位置情報および画像情報が不要作動地点データベース2に記憶されている不要作動地点の位置情報および画像情報と照合される。そして、照合の結果、両者が相互に近似していれば障害物が実在しないものと判定され、両者が相互に近似していなければ障害物が実在するものと判定される。これにより、自車両が走行する道路上の障害物を誤検出することなく的確に検出することが可能となる。
(もっと読む)
インテリジェント走行支援システム
【課題】携帯端末に適用するインテリジェント走行支援システムを提供する。
【解決手段】レーン逸脱検出、荷物紛失検出、走行状況下での前方物体検出、走行状況下での側方物体検出、及び走行状況下での後方物体検出を含む、複数の安全モードで検出でき、また、異なるモジュールからの検出結果に従い警告を発することができる。最後に、異なるモジュールからの検出結果に従い、リアルタイム画像を保存でき、その後関連情報を、他の場所にリアルタイムで通知するために、GPSシステム及びデジタル地図からの情報と合致させて、送信できる。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】運転者に違和感を与える制御を低減しつつ、側方障害物に対する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】自車両の側方に存在する障害物を検出すると、所定時間後の自車両の将来位置を予測する。また、その予測した自車両の将来位置に基づき障害物に対するリスク度合いを算出する。そして、その算出した障害物に対するリスク度合いに応じて、障害物への接近を防止するように自車両を制御する。ただし、運転者の前記障害物と反対側の隣接車線への車線変更の意思を検出した場合には、障害物への接近を防止する制御を抑制する。
(もっと読む)
車両周辺表示装置
【課題】指標線を認識しやすい周辺表示装置を提供する。
【解決手段】車両に設けられた撮影装置により撮影された車両の周辺画像を取得する画像取得部と、車室内に設けられ周辺画像を表示する表示装置と、運転者による運転操作の際に、運転者の指標となる指標線50aを、指標線50aに沿って影部50cを付して周辺画像に重畳表示させる指標線出力部とを備える。
(もっと読む)
乗物搭載用監視装置
【課題】乗員に対して、衝突に注意すべき注意物体以外に不要な注意を喚起することなく、注意物体の存在、位置および外形を適切に知らせることができる乗物搭載用監視装置を提供する。
【解決手段】本発明に係る乗物搭載用監視装置1000は、乗物周辺を被写体として撮像して画像信号を生成するカメラ10と、カメラ10により撮像された画像に映る物体の中から、乗員が衝突に注意すべき注意物体を、物体の乗物に対する接近の態様に基づいて検知する注意物体検知部20と、注意物体検知部20が注意物体を検知したとき、注意物体に対応する領域以外の領域を、注意物体に対応する領域と比較して目立たなくする画像処理を行う画像処理部30と、画像処理部30により画像処理が行われた画像を表示するモニター40とを備えている。
(もっと読む)
車両用道路形状検出装置
【課題】左右の道路区分線の一方の画像部分しか抽出されなかった場合であっても、走行車線の勾配を検出することができる車両用道路形状検出装置を提供する。
【解決手段】カメラにより撮像された自車両前方の画像から、自車両の走行車線を区分する右側道路区分線の画像部分LR及び左側道路区分線の画像部分LLを抽出する道路区分線抽出手段12と、道路区分線の画像部分LR,LLに対して、対応する実空間上の位置が最も自車両に近くなる箇所Y13から所定範囲内(Y13〜Y11)にある箇所IR,ILにおける接線TR,TLを求め、自車両の進行方向に相当するY軸方向における道路区分線の画像部分LR,LLとその接線TR,TLとの偏差ΔYR,ΔYLに基づいて、自車両の走行車線の勾配を検出する道路形状検出手段13とを備える。
(もっと読む)
道路方向認識方法及び装置
【目的】レーンマークを正確に認識しなくても、候補レーンマークに基づき走行道路の方向を検出することができる「道路方向認識方法及び装置」を提供する。
【構成】 車載撮像装置で撮像された画像より走行道路の方向を検出する際、車両前方の撮影角度範囲を複数に分割して複数の方向領域を設定し、撮像画像からレーンマークの候補としての候補レーンマークを抽出し、該抽出した各候補レーンマークが所属する方向領域を決定し、方向領域毎に、該方向領域に所属する候補レーンマークの合計長さを算出し、複数の方向領域のうち算出された候補レーンマークの合計長さが最も大きい方向領域の方向を、走行道路の方向として確定する。
(もっと読む)
車線区分線認識装置、車線維持支援装置及び車線区分線認識方法
【課題】視界が薄暗い状況下においても車線区分線を正確に認識し得ると共に、前照灯の不必要な点灯を未然に回避して省エネルギー化を図ることができる車線区分線認識装置、車線維持支援装置及び車線区分線認識方法を提供すること。
【解決手段】車線区分線を撮像する撮像手段と、該撮像された画像データの認識範囲から前記車線区分線を抽出し認識する認識制御手段と、を備える車線区分線認識装置であって、前記認識制御手段は、路面環境が視界の薄暗い状況下である場合、車両に搭載され、該車両の前照灯における点灯・消灯の切り替えを制御する切替制御手段に対し、前記前照灯の点灯・消灯を交互に繰り返し切り替えるよう制御し、前記前照灯の点灯時における前記車線区分線の認識度合いと、前記前照灯の消灯時における前記車線区分線の認識度合いとを比較した結果、前記前照灯の点灯による前記車線区分線の認識改善度が所定値よりも高い場合、当該前照灯が点灯を維持するように前記切替制御手段を制御するようにした。
(もっと読む)
露出設定装置、露出設定プログラム、および画像処理装置
【課題】画像処理の際の処理負荷を極力軽減しつつ、良好にエッジ成分を検出するための技術を提供する。
【解決手段】白線検出システムは白線検出処理にて、予め設定された初回露出で前方カメラに撮像させ、初回露出での撮像画像に基づいて次に前方カメラが撮像を行う際の露出である適応露出を設定し、さらに適応露出で前方カメラに撮像させ、初回露出での撮像画像、および適応露出での撮像画像からエッジ成分を検出する。適応露出を設定する際には、初回露出による撮像画像内から複数の領域を抽出し、該抽出した各領域の輝度を検出する(S140)。そして、各領域の輝度に基づいて、各領域が不適合エリアであるか否かをそれぞれ判定する(S150,S160)。さらに、各領域の何れかが不適合エリアであると判定された場合、前方カメラが撮像する際の露出を不適合エリアの輝度に応じた露出である適応露出に設定する(S180)。
(もっと読む)
駐車支援装置
【課題】より適切に運転者の駐車操作を支援することができる駐車支援装置を提供する。
【解決手段】駐車支援装置は、目標駐車位置と自車両が所定の相対位置関係にある一旦停止位置において当該目標駐車位置を認識する認識手段と、目標駐車位置に基づいて駐車運転時の操舵操作を支援する支援手段と、一旦停止位置に自車両を運転者が停止させるにあたって、目標駐車位置の特徴箇所と前記自車両との相対位置関係を三次元的に当該運転者が視認することを補助するための自車両の車両用ミラーに設けられた車幅方向外側に延びる部材により構成される駐車補助手段22とを備える。
(もっと読む)
車両の運転支援装置
【課題】車線逸脱判定時に自車両の乗員に対して効果的に車線逸脱の注意を喚起して運転者の車両運転の十分な支援を図る。
【解決手段】自車両1前方に可視光ビームLを照射する照射手段100と、自車両1前方の撮像画像から自車両1が走行中の車線を検出し(S32)、この検出された車線に対して自車両1が逸脱するか否かを判定する(S35)判定手段60とを有する車両1の運転支援装置において、前記判定手段60で自車両1が車線逸脱すると判定されたとき(S35でYES)、自車両1の乗員に対して車線逸脱の注意を喚起するための情報Xを自車両1前方の路面上に描くように前記照射手段100を制御する(S37)制御手段60を備える。
(もっと読む)
路側固定物検出装置
【課題】車両に搭載され、該車両側方の路側固定物を精度良く検出可能なガードレール検出装置を提供する。
【解決手段】距離画像センサにより、車両側方の判定対象物の距離画像を取得するとともに、車両の幅方向の走行位置に応じてテンプレート距離画像を生成し(ステップS5の処理を実行して)、該生成したテンプレート距離画像と該取得した距離画像とのマッチング度を算出し、該算出したマッチング度を基に判定対象物がガードレールか否かを判定する(ステップS11乃至ステップS13の処理を実行する)ようにした。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】切り返しを含む一連の駐車経路を算出して駐車支援を行うことにより、車両運転者の負担をより一層低減できるようにした駐車支援装置および駐車支援方法を提供する。
【解決手段】駐車の初期位置および初期姿勢と、駐車の目標位置および駐車姿勢とを検知し、初期姿勢に応じて初期位置からの車両の経路として設定可能な経路を第1移動経路、駐車姿勢に応じて目標位置に到達する車両の経路として設定可能な経路を第2移動経路としたときに、第1移動経路と第2移動経路との接点となる位置が存在し得る候補領域を算出する。そして、当該候補領域内で車両乗員により選択された位置、あるいは当該候補領域内で任意に自動選択した位置を切り返し位置として決定し、初期位置から切り返し位置を経由して目標位置に到達する一連の経路を駐車経路として算出する。
(もっと読む)
道路標示認識装置
【課題】路面からの太陽光の反射光及び路面上の自車両の影の影響をうけることなく、道路標示を高精度に認識することが可能な道路標示認識装置を提供する。
【解決手段】前方カメラ40f及び後方カメラ40rが、車両1の前方及び後方の画像を視野40a及び視野40bで夫々撮像し、CPUが、撮像された夫々の画像の一部である特徴ベクトルと、予めテーブルに記憶されたパターンである特徴ベクトルとを1文字ずつ照合する。そして、照合した結果が一致した場合、CPUが、一致した1文字を含む「止まれ」、「とまれ」及び「徐行」の文字列からなる道路標示を認識する。また、ブザー30が、警告音を発し、液晶ディスプレイ20が、前方カメラ40fからの画像を表示する。
(もっと読む)
車両用警報装置
【課題】車両進行方向にある交差点付近の停止線に関する警報をより適切なタイミングで出力可能な車両用警報装置を提供すること。
【解決手段】車両進行方向にある交差点付近の停止線に関する警報を出力する車両用警報装置10において、停止線から交差点までの距離L1を検出する距離検出手段24と、車両が走行する道路の制限速度VLを検出する制限速度検出手段26と、距離検出手段24及び制限速度検出手段26の検出結果に基づいて、警報の出力タイミングTaを変化させる変化手段28と、警報出力後の走行状況を検出する走行状況検出手段32と、走行状況検出手段32の検出結果に応じて、次回以降の警報の出力タイミングTaを調整する調整手段34と、を備える。
(もっと読む)
停止義務地点学習装置及び停止義務地点学習プログラム、並びにこれを用いたナビゲーション装置
【課題】学習効率の低下を最小限に抑えつつ、停止義務情報を関連付ける交差点を適切に決定することのできる停止義務地点学習装置を提供する。
【解決手段】停止義務情報を生成して、当該停止義務情報を一時停止義務がある交差点に関連付けて記憶する停止義務地点学習装置であって、停止義務指標の画像認識を行う画像認識範囲を、各交差点を基準として設定する認識範囲設定手段と、自車位置周辺の画像情報に含まれる、停止義務指標の画像認識を行なう画像認識手段と、停止義務指標の画像認識結果に基づいて停止義務情報を生成する停止義務情報生成手段と、画像認識範囲がN個に亘って順次重複している場合に、当該N個の画像認識範囲を連続する一つの範囲である和範囲とし、当該和範囲に含まれる、画像認識に成功した停止義務指標の個数に基づいて、停止義務情報を関連付ける交差点を決定する停止義務地点決定手段と、を備える。
(もっと読む)
車両周辺表示装置
【課題】指標線を認識しやすい周辺表示装置を提供する。
【解決手段】車両に設けられた撮影装置により撮影された車両の周辺画像を取得する画像取得部と、車室内に設けられ周辺画像を表示する表示装置と、運転者による運転操作の際に、運転者の指標となる指標線50aとして、駐車スペースを示す駐車枠線を、影部50c及び指標線50aに隣接する側面部50bのうち少なくとも一方を付して周辺画像に重畳表示させる指標線出力部とを備える。
(もっと読む)
距離算出装置および算出プログラム
【課題】移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。
【解決手段】算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。
(もっと読む)
81 - 100 / 328
[ Back to top ]