
Fターム[5H180CC24]の内容
Fターム[5H180CC24]に分類される特許
121 - 140 / 328
車両の障害物検知装置
【課題】車両が障害物と衝突しそうか否かを迅速に判定し且つ障害物検知装置による作動機器の誤作動を抑えつつ、車両が走行車線から逸脱した際の安全性を向上させる。
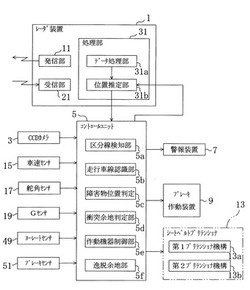
【解決手段】障害物を検知するレーダ装置1と、レーダ装置1から情報を受けて作動機器7,9,11を制御するコントロールユニット5とを備えた障害物検知装置である。障害物が走行車線内に位置しているか否かを判定する障害物位置判定部5cと、走行車線からの車両の逸脱を予知する逸脱予知部5fと、車両と障害物との衝突を予知する衝突予知判定を行う衝突予知判定部5dとをさらに備えている。衝突予知判定部5dは、障害物位置判定部5cにより障害物が走行車線内に位置していると判定されたときには衝突予知判定を行う一方、障害物が走行車線内に位置していないと判定された場合には、逸脱予知手段5fにより走行車線からの車両の逸脱が予知されたときにのみ衝突予知判定を行う。
(もっと読む)
車線逸脱防止装置及びその方法

【課題】コンプライアンスステアによるトー角変化を抑制して、自車両の走行車線からの逸脱を防止するために必要な目標ヨーモーメントを適切に得る。
【解決手段】車線逸脱防止装置は、走行車線に対する車両の逸脱傾向を判定する車線逸脱傾向判定手段(ステップS3、ステップS4)と、車線逸脱傾向判定手段が逸脱傾向があると判定した場合に、車輪の制動力を制御して、左右輪に制動力差を発生させることで車両にヨーモーメントを付与する制動力制御手段(ステップS13、ステップS14)と、車輪に制動力を発生させる際に生じるコンプライアンスステアによるトー角変化を基に、制動力制御手段が車輪に発生させる制動力を補正するコンプライアンスステア用補正手段(ステップS10)と、を備える。
(もっと読む)
車線位置検知システム
【課題】種々の道路状況・道路環境に応じて自動的に最適な白線検知処理を行うことが可能な車線位置検知システムを提供すること。
【解決手段】本発明に係る車線位置検知システム20は、車載カメラ21で路面を撮像して得られた画像を俯瞰画像に変換し、俯瞰画像の輝度を車両進行方向に平行に積分して進行方向に垂直な方向に対する輝度プロファイルを求め、輝度プロファイルにフィルタ処理を施すことによって白線の位置を検出するシステムである。車線位置検知システム20は、車両に設置されたセンサの情報に基づいて路面状況を判定し、判定された路面状況に基づいて、フィルタ処理に用いられるフィルタの遮断周波数の高低を変更する。
(もっと読む)
路面標示画像処理装置、路面標示画像処理方法並びに路面標示画像処理プログラム
【課題】路面標示の一部に影が重畳しているような状況においても、輝度画像などを用いる場合よりも良好に路面標示を認識できる路面標示認識装置を提供する。
【解決手段】日陰に差し込む光は、日向に比べ青系の光の占める割合が多いという特徴がある。そこで、青成分強度画像生成モジュール103はカラー画像取得モジュール101が出力するカラー画像から青成分の強さを表す青成分強度画像を生成し、日陰補正画像生成モジュール104は前記青成分強度画像を輝度画像に加算する。これにより、輝度画像を用いる場合に比べ、日陰の路面標示に対応する画素の値が、日向の舗装道路面に対応する画素の値に比べ大きくなるようになり、画像全体において路面標示および舗装道路面に対応する画素の値が2つに分離するようになり、高精度に路面標示を認識できるようになる。
(もっと読む)
走行レーン検出装置
【課題】単純な処理で検出漏れの少ない走行レーン検出装置を提供する。
【解決手段】本発明の走行レーン検出装置は、路面の画像を取得するために車両に搭載された撮像部と、前記画像を処理して路面上のレーンマークを検出する画像処理部とを備える。前記画像処理部は、前記車両が前記レーンマークを跨いでいるかどうかを判定し、前記車両が前記レーンマークを跨いでいない場合には、前記車両の前方路面の左右あるいは後方路面の左右のレーンマークを検出するための第1のウィンドウと第2のウィンドウとを前記画像に設定して、それぞれのウィンドウ内の画像を処理してレーンマークを検出する。前記車両がレーンマークを跨いでいる場合には、跨いでいるレーンマークを含む第3のウィンドウを前記画像に設定して、前記第3のウィンドウ内の画像を処理してレーンマークを検出する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法およびプログラム
【課題】 道路標示のデータベースが不完全な場合であっても、従来より精度の高い経路案内を行えるナビゲーション装置を提供する。
【解決手段】 ナビゲーション装置10は、車両の現在位置を算出する車両位置算出部12と、道路標示のデータを記憶した道路標示DB26と、車両に搭載されたカメラ40の画像から道路標示を検出する道路標示検出部14と、道路標示DB26のデータを用いて、所定の探索範囲内にある道路標示の中に道路標示検出部14にて検出した道路標示と同じ種類の道路標示があるか照合することにより、検出した道路標示の位置を特定する照合部24と、検出した道路標示の位置が判定された場合には、その道路標示の位置に基づいて経路案内を行い、検出した道路標示の位置が特定されなかった場合には、車両位置算出部にて算出された車両の現在位置に基づいて経路案内を行うと決定する案内内容決定部30とを備える。
(もっと読む)
走行可能領域生成装置
【課題】 離散的条件が付された場合であっても、走行軌跡を生成する際の最適化手法を行う際に好適に用いられる走行可能領域を生成することができる生成装置を提供する。
【解決手段】 走行可能領域演算部13は、障害物位置計測部12から出力された自車両情報およびセーフティコーン位置情報に基づいて、自車両の走行軌跡を描くことができる範囲を規定する走行可能領域を算出する。このとき、同心で形状が比例関係にある大小二つの楕円弧と平行でない二つの直線部とによって囲まれた楕円扇形を含む区間および平行な二つの直線部を含む平行辺含有形状の区間を設定し、前記楕円扇形の直線部と前記平行辺含有形状における平行な二辺のうちの一辺とを繋ぎ合わせて形成した領域に基づいて、走行可能領域を生成する。
(もっと読む)
車載システム
【課題】任意の路面標示を適正に検出する「車載システム」を提供する。
【解決手段】画像補正部2は、カメラ1がフレーム周期で逐次撮影した各画像に歪み補正や視点変換を施して、車両100の後方直後の路面領域を上方の視点から観察した場合に得られる画像を補正画像220として生成する。画像合成部3は、画像補正部2によって以上のようにしてフレーム周期で逐次生成される補正画像220から、同じ垂直方向座標範囲内の画像部分を抽出して合成し、車両100が走行してきた路面全体を上方の視点から観察した場合に得られる画像を路面画像300として生成する。路面標示画像抽出部4は、画像合成部3が生成した路面画像300から、路面標示が写り込んでいる部分を路面標示画像430として抽出する。
(もっと読む)
車両周辺監視装置
【課題】撮像手段の用途を切り替える際に撮像手段の露出制御を適切にすることができる車両周辺監視装置を提供する。
【解決手段】車両に設置され、車両周辺を撮像する車載カメラの撮像範囲に対して設定された測光領域内について測光を行い、その測光結果に基づいて、車載カメラの露出制御を行う車両周辺監視装置において、撮像範囲に対して、相異なる複数の領域A、領域B、及び領域Cを指定する。そして、モニタをオン/オフする表示スイッチを切り替えることで、領域A及び領域B、又は領域Cの何れかを測光領域に設定する。
(もっと読む)
ドライバ状態推定装置及びプログラム
【課題】ドライバが運転不適状態であるか否かを推定でき、将来の事故発生を防ぐことができるようにする。
【解決手段】レーン位置センサ12によって、レーン中心からの距離を示すレーン位置信号の時系列データを出力する。信号抽出部22によって、レーン位置信号の時系列データから、各区間の区間最大値を抽出する。分布パラメータ推定部24によって、抽出された区間最大値に基づいて、一般極値分布を表わす確率分布関数を決定するパラメータを推定する。リスク推定部26によって、推定されたパラメータによって決定される確率分布関数から、レーン中心からの距離が所定値以上となる逸脱確率を事故発生リスクとして推定し、不適運転推定部28によって、推定された逸脱確率に基づいて、ドライバが運転不適状態であるか否かを推定する。
(もっと読む)
車両用逆走防止装置
【課題】ユーザ利便性を向上させた車両用逆走防止装置を提供すること。
【解決手段】自車両の逆走を検出する車両用逆走防止装置が、交差点接近時の自車両運転者の挙動を記録する記録手段と、この自車両運転者の挙動の履歴から、交差点における自車両の進行方向を予測する予測手段と、この予測された予測進行方向に進入禁止道路が存在するか否かを判定する判定手段と、予測進行方向に進入禁止道路が存在すると判定されたとき、自車両運転者に警報を発する警報手段と、警報が発せられた後、自車両運転者が予測進行方向へ向けて操舵した場合には、そのような操舵を妨げようとする方向に操舵反力を発生させる操舵反力発生手段と、この操舵反力に抗う操舵力で自車両運転者が予測進行方向へ向けて更に操舵した場合に、自動的にアクセルをオフにする又はブレーキを掛ける減速手段とを備える。
(もっと読む)
ナビゲーション装置
【課題】車両が駐車場に進入したことを検出するナビゲーション装置を提供する。
【解決手段】フロントカメラ19により車両前方を撮像する。フロントカメラ19により撮像された路面の画像40Aについて、輝度変化の大きいエッジを抽出する。エッジを抽出したエッジ画像40Bに基づいて、路面の白線を認識し、認識した白線が駐車場の区画であるか否かを判定することにより、車両が駐車場に進入したことを検出する。車両が駐車場に進入したことを検出すると、マップマッチングを行わない。
(もっと読む)
路面標示認識装置
【課題】認識対象の路面標示と類似した形状の路面標示が存在する場合、実際の認識対象と異なる場所での誤認識が発生し、自車の位置が実際とは違う位置に算出される誤動作が発生する。
【解決手段】車両に搭載したカメラ108を用いて路面標示を認識させる際に、自車位置の周辺に、これから認識しようとしている路面標示と形状が類似している路面標示の有無に応じて、路面表示認識機能105の判定条件を変更する。類似した形状の路面標示が存在しない場合は、認識の判定条件とする画像上の特徴量の必要数を少なくし、路面標示のペイントのかすれ等の条件の悪い場合においても認識ができるようにする。一方、自車位置の周辺に形状が類似した路面標示が存在する場合は、認識の判定条件とする画像上の特徴量の必要数を多くし、類似した形状の路面標示において誤認識しないようにする。
(もっと読む)
航空機を位置合わせするための装置および方法
【課題】航空機を地上のエリアに対して位置合わせするための装置および方法を提供する。
【解決手段】航空機を地上のエリアに対して位置合わせするための装置が提供される。その装置は、搭載型の着陸システムを有する航空機を含み、搭載型の着陸システムは、地上のエリアの画像を記録するように構成される。装置はまた、地上のエリア上の位置マーカと、記録された画像のエリアの少なくとも一部を示す保存された画像とを含む。搭載型の着陸システムは、位置マーカから情報を取得し、その情報を使用して、記録された画像を保存された画像に対して位置合わせするように構成される。
(もっと読む)
走行支援装置、車間距離設定方法
【課題】先行車両が白線認識距離内に存在しても、白線認識して走行支援が可能な走行支援装置等を提供すること。
【解決手段】車両前方を撮影する撮像手段11と、撮像手段が撮影した画像データから走行レーンを区分する車線区分線を認識する区分線認識手段12と、自車両の走行レーンに検出された先行車両に追従走行し、先行車両が検出されない場合に設定車速で定速走行する車両走行制御手段13,15、17と、を有する走行支援装置100において、追従走行の際に自車両の車速に応じた仮目標車間距離を決定する仮目標距離決定手段42と、区分線認識手段が車線区分線を認識する認識距離内の、先行車両が車線区分線を遮蔽していることを検出する遮蔽検出手段45と、遮蔽回避距離を検出する遮蔽距離検出手段46と、遮蔽回避距離を仮目標距離の代わりに、追従走行の際の目標車間距離に決定する目標車間距離決定手段43と、を有することを特徴とする。
(もっと読む)
車線変更支援装置
【課題】車線変更時の判断をドライバに迅速かつ的確に行わせることが可能な車線変更支援装置を提供する。
【解決手段】当該装置の制御部が行う車線変更支援制御処理では、自車速が閾速度を超えていれば(S115:YES)、対象カメラが撮像した撮像画像に基づいて隣接車線(対象車線)を検出(S120)し、対象車線が存在している場合(S125:YES)に、対象車線上で他車両が存在しなければ自車両が安全に車線変更を行うことができる領域(余裕領域)を設定(S130)し、この余裕領域を強調した画像(領域画像)を、撮像画像に重畳(S140)させて、対象表示部に表示(S150)する。従って、車線変更時の指標となるイメージ画像と、隣接車線上の実際の様子を撮像した撮像画像とを一体化させて表示するため、後側方に対して車線変更のために必要な車間隔をドライバに直観的に認識させることができる。
(もっと読む)
映像出力装置および方法、映像表示装置および方法
【課題】映像が撮影されてからディスプレイに表示されるまでの処理時間を短縮する。
【解決手段】受信機20は、車載カメラ12で撮影され符号化された画像フレーム信号を無線通信を介して受け取る。復号部24は、符号化された画像フレーム信号を復号して出力する。マーカ描画部26は、復号部24から出力された画素信号をフレームメモリ28上に描画する際に、画像フレーム内での予め定められた座標に対応する画素信号の代わりに、フレーム内での位置情報をドライバーに知らせるためのマーカの表示色データに相当する画素信号を出力する。マーカ描画部26は、復号部24から出力された画素と、マーカの表示色データに相当する画素とをアルファブレンディングにより合成して出力してもよい。
(もっと読む)
駐車支援装置
【課題】駐車スペースにおける最適な駐車位置への迅速かつ適切な駐車を支援することができる「駐車支援装置」を提供すること。
【解決手段】走行補助線表示処理手段17は、自車両の左後輪のタイヤ軌跡における一部の形状に対応した形状を有する左側の走行補助線20と、自車両の右後輪のタイヤ軌跡における一部の形状に対応した形状を有する右側の走行補助線21との2本の走行補助線20,21であって、車両周辺監視画像11上における自車両の後輪の車軸に対応する位置に仮定された車幅方向に平行な第1の仮想直線L1(1)上における両走行補助線20,21間の離間距離dが、駐車スペースの車両周辺監視画像11上における間口寸法sに一致するように形成された2本の走行補助線20,21を生成するように形成されていること。
(もっと読む)
白線検出装置、駐停車支援装置および白線検出方法
【課題】エッジ部の検出が困難な画像でも白線の抽出が可能な白線検出装置を提供する。
【解決手段】撮像部Aにて車両周囲を撮像した撮像画像を、例えば画像編集部C01の変換画像作成部C01bにより視点変換した変換画像を処理対象画像として作成してデータメモリ部B02に保存した後、エッジ部位抽出部C02、エッジ部輝度値ヒストグラム作成部C03により処理対象画像の各画素の輝度値の出現頻度から白線候補領域と推定されるエッジ候補領域を抽出して、2値化閾値決定部C04により該エッジ候補領域のピーク輝度値の近傍の輝度値を2値化閾値として決定し、白線算出部C05により、2値化閾値を用いて処理対象画像を2値化画像に変換して、その中から白線部を抽出し、データメモリ部B02に保存する。変換画像ではなく、撮像画像そのものまたは圧縮画像作成部C01aにより該撮像画像から画素数を間引きした圧縮画像を処理対象画像としても良い。
(もっと読む)
車両用ナビゲーション装置
【課題】道路地図データのアップデート作業の手間を軽減することができ、それにより、最新の道路地図データが、より早期のユーザへの提供を促進可能な車両用ナビゲーション装置を提供すること。
【解決手段】車両用ナビゲーション装置20は、車載カメラ4の撮影画像に基づいて認識された道路形状と、記憶している道路地図データによる道路形状が異なると判定したときに、その道路情報が異なる地点及びその地点での撮影画像を含む情報を外部のデータ管理サーバーに送信する。データ管理サーバーには、道路地図データにおける道路形状が、実際の道路形状と相違する地点に関する情報が蓄積される。従って、道路地図データをアップデートする際に、道路地図データを修正する必要がある箇所の情報が得られるので、アップデートの手間を軽減することができる。
(もっと読む)
121 - 140 / 328
[ Back to top ]