
Fターム[5H180CC24]の内容
Fターム[5H180CC24]に分類される特許
1 - 20 / 328
標識認識装置及び標識認識方法
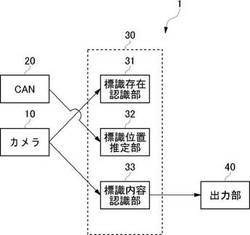
【課題】 標識認識を効率よく行うことのできる標識認識装置を提供する。
【解決手段】 車両に搭載されて標識を認識する標識認識装置1は、車両の前方を撮影して画像を取得するカメラ10と、カメラ10にて得られた画像内の標識存在認識エリアEAにおいて、標識存在認識(第1の認識レベルでの標識認識)を行う標識存在認識部31と、カメラ10にて得られた画像内の標識存在認識エリアEAとは異なる標識内容認識エリアCAにおいて、標識内容認識(第1の認識レベルより高い第2の認識レベルでの標識認識)を行う標識内容認識部33を備える。これにより、複数の認識エリアEA,CAについて、それぞれ異なる認識レベルで標識を認識するので、画像内で高い認識レベルが必要とされない部分の認識レベルを落とすことで、全体として標識認識の効率を向上できる。
(もっと読む)
車載白線認識装置

【課題】横断歩道や複合線が存在しても、白線を正しく認識できる車載白線認識装置を提供すること。
【解決手段】車両周囲の画像を取得する車載カメラ10と、車載カメラ10で取得した画像から画像処理により白線候補を抽出する白線候補抽出手段30と、白線候補の白線らしさの確信度を算出する確信度算出手段40と、確信度算出手段40が算出した確信度に基づき、認識する白線を選択する白線選択手段50、60と、車載カメラ10で取得した画像から画像処理により複合線を検出する複合線検出手段40と、車載カメラ10で取得した画像のうち、複合線検出手段40により検出した複合線を除外した領域において、画像処理により横断歩道を検出する横断歩道検出手段120とを備え、確信度算出手段40は、白線候補が横断歩道検出手段120により検出した横断歩道に属する場合、それ以外の場合よりも、その白線候補の確信度を低くすることを特徴とする車載白線認識装置1。
(もっと読む)
白線検出装置
【課題】本発明は、白線のエッジ抽出の際の閾値の決定手段(適応制御的なもの)を不要とし、処理を簡素化して、白線両端に生じるエッジのうちの右側を信頼性高く抽出する手法を提供することを目的としている。
【解決手段】このため、走査線方向に隣り合う2つの画素の輝度の差分を算出する差分算出手段と、差分算出手段の差分が予め設定された閾値以上か否かを判定する閾値判定手段と、閾値判定手段で差分が閾値以上と判定された第1の画素から、白線の幅分と定めた画素数だけ走査線方向にずれた位置に、閾値判定手段で差分が閾値以上と判定された第2の画素が存在するか否かを判定する白線幅判定手段とを備え、白線幅判定手段で第2の画素が存在すると判定された場合に、第1の画素あるいは第2の画素を白線のエッジとする。
(もっと読む)
区画線検出装置
【課題】区画線を適切に検出する区画線検出装置を提供する。
【解決手段】画像処理ECUは、路面画像のデータを取得し(S10)、取得した路面画像に基づいてエッジ点を抽出する(S12)。次に、S12にて抽出されたエッジ点から縦方向に連続するエッジ点をノイズとして除去し(S14)、ハフ変換によってエッジ線の抽出を行う(S16)。次に、抽出したエッジ線に基づいて区画線位置の算出を行い(S18)、区画線の逸脱判定を行う(S20)。ここでは、ヨーレートおよび車両速度に基づいて予測した車両の走行軌跡と、S18にて算出した区画線の位置とから車両が区画線を逸脱するまでに要する時間を算出する。算出した時間が所定のしきい値以上であれば逸脱しないと判定し(S20:NO)、しきい値未満であれば逸脱の危険ありと判定し(S20:YES)、ブザー要求の制御信号を出力する(S22)。
(もっと読む)
区画線認識システム、区画線認識方法、及び区画線認識プログラム
【課題】路面上の区画線を高精度に認識すること。
【解決手段】区画線認識システムは、自車の車速を検出する車速検出手段と、自車のヨーレートを検出するヨーレート検出手段と、路面の原画像を入力する画像入力手段と、複数の異なる時刻における原画像に基づいて合成鳥瞰画像を生成し、合成鳥瞰画像に、合成鳥瞰画像を生成したときの車速とヨーレートとを関連付ける合成鳥瞰画像生成手段と、原画像および合成鳥瞰画像のうち少なくとも一方から、区画線候補を検出する区画線候補検出手段と、合成鳥瞰画像と関連付けられた車速およびヨーレートとに基づいて、車両の直進区間を抽出し、直線区間毎に区画線候補を認識し、認識した区画線候補が区画線として適しているか否かを検定する区画線候補検定手段と、を備えている。
(もっと読む)
運転支援装置
【課題】運転者に対して、駐車開始を実行する際の位置合わせの精度を向上させるための情報を提供したい。
【解決手段】生成部22は、車両に設置された少なくともひとつの撮像装置によって撮像された画像をもとに、車両周辺の鳥瞰図画像を生成する。予想軌跡記憶部30は、鳥瞰図画像に対応すべき車両の予想軌跡であって、車両のハンドルを操作して車両を移動させる場合の予想軌跡をハンドルの舵角を変えながら複数記憶する。合成部32は、予想軌跡記憶部30において記憶した複数の予想軌跡を鳥瞰図画像に重畳して表示する。
(もっと読む)
運転支援装置
【課題】カーナビゲーション装置を搭載していない車両であっても、交差点における一時停止を予測し、それを的確に報知することができるようにする。
【解決手段】車両制御部12は、車両に搭載したカメラユニット10で撮影した画像データに基づいて、交差点6を検出し、次いで当該交差点6に信号機3が有るか否か、停止標識4が有るか否か、停止線5が有るか否かを調べる。そして信号機3の信号灯色が赤色或いは黄色であり、或いは停止標識4が検出され、或いは停止線5が検出された場合であって、自車両1が停止線5に到達するまでの距離Lが注意報知距離L1以内で(L≦L1)、且つ車速Vが設定車速V1以上の場合、警報装置14から運転者に注意を促す警報を発生させる。
(もっと読む)
駐車支援装置
【課題】車両を後退させて駐車する際に適切な駐車支援を行うことができる駐車支援装置を提供する。
【解決手段】 駐車支援装置のECUは、GPSにより検出された車両位置座標と地磁気センサにより検出された車両前後方位とを読み込み、これらの車両位置座標及び車両前後方位に基づいて車両前後方向と車両進行方向との角度差δを算出する。そして、ECUは、角度差δの絶対値が所定差分閾値A2よりも大きいときは、ガイド線表示フラグをOFFにし、角度差δの絶対値が所定差分閾値A1以上であり且つ所定差分閾値A2以下であるときは、ガイド線表示フラグをONにすると共にガイド線補正フラグをONにし、角度差δの絶対値が所定差分閾値A1よりも小さいときは、ガイド線表示フラグをONにすると共にガイド線補正フラグをOFFにする。
(もっと読む)
車両用警告装置
【課題】車室内にアレルギー物質がある場合に、警告タイミングを調整することができる車両用警告装置を提供する。
【解決手段】
本発明に係る車両用警告装置1は、所定の条件下で、運転者に対して警告をだす警告部5を備える車両用警告装置であって、車室内のアレルギー物質を検出するアレルギー物質検出部3と、アレルギー物質検出部3による検出結果に応じて、警告部5の警告タイミングを決定する警告タイミング決定手段としてのECU2とを備え、警告部5がECU2によって決定された警告タイミングで警告をだすため、警告部5の警告タイミングを、車室内にアレルギー物質がある場合に調整することができる。
(もっと読む)
路肩検出装置及び路肩検出装置を用いた車両
【課題】走行路面と路外との境界である路肩に白線やガードレール等の立体物がなくても、画像情報から路肩を検出する路肩検出装置を提供する。
【解決手段】入力された車外環境の三次元画像情報から対象物の有無及び自車両から対象物までの距離を算出する距離情報算出部と、算出された距離に基づく距離画像から自車両が走行する走行路面を検出する走行路面検出部と、検出された走行路面と路外との高低差を測定する高低差算出部と、測定された高低差に基づいて、走行路面と路外との境界である路肩が、走行路面より低い路外がある場合の路肩か否か判定する路肩判定部と、を有する路肩検出装置。
(もっと読む)
仮想白線設定方法、仮想白線設定装置及びそれを用いた針路変更支援装置
【課題】車両の乗員に不快感や不安を与えないようにする仮想白線設定技術を提供する。
【解決手段】前方カメラ10により、自車両の走行車線の白線及び走行車線上の自車両の走行を妨げる対象物を検出し、対象物が検出されたときに、車載レーダ30で検出した対象物と自車両との間の距離及び対象物の速度及び速度計40で検出した自車両の速度に基づき、下記式1及び式2で示す式にしたがって仮想白線を設定する。仮想白線位置=検出した白線位置+仮想白線曲げ量・・・式1、対象物の白線からのはみ出し距離をXr、回避マージンをXm、衝突時間をttc、仮想白線曲げ開始時間をttcstart、仮想白線曲げ終了時間をttcend、自車両位置より先の仮想白線を演算するための係数をαとした場合、前記式1における仮想白線曲げ量は、
とする。
(もっと読む)
車両用運転支援装置
【課題】地理的な対象物の探索に関して、処理速度と検出精度とを高めることができる車両用運転支援装置を提供する。
【解決手段】前方監視カメラ3、GPS4、ジャイロセンサ5、制御ユニットUを利用して、ナビゲーション装置6が保有する三次元地図データとしてのボクセルBを抽出すると共に、そのボクセルBのうちから、区画線23等を含むものを抽出し、それらを前方監視カメラ3が撮影した撮影画像に組み込む。そして、その撮影画像21全域ではなく、その撮影画像21のうち、区画線23等を含むボクセルBについてのみ、区画線23等の検出処理を行う。これにより、探索領域(検出範囲)を少なくする。
(もっと読む)
駐車支援装置
【課題】駐車支援装置において、撮像された自車両の後方画像から駐車枠の白線と白線端点とを検出して画像表示の切換タイミングの精度を向上する。
【解決手段】制御手段9は、撮像された自車両の後方画像の歪みを補正して歪み補正画像にする歪み補正手段9Aと、撮像された自車両の後方画像を俯瞰画像に変換する画像変換手段9Bと、変換された俯瞰画像から駐車枠2の白線を検出する白線検出手段9Cと、検出された白線の白線端点を検出する白線端点検出手段9Dと、検出された白線端点と自車両との距離に基づいて表示手段8に表示する画像を歪み補正画像と俯瞰画像とのいずれかに切り換える表示切換制御手段9Eとを備える。
(もっと読む)
道路標示認識装置及び道路標示認識方法
【課題】走行している車線が特定車線か否かを正確かつ高速に判定することのできる「道路標示認識装置及び道路標示認識方法」を提供すること。
【解決手段】道路標示認識装置は、カメラと、カメラで撮影された画像を基に、車線マークを検出する車線マーク検出部と、カメラで撮影された画像を基に、特定の道路標示を検出する特定道路標示検出部と、自車両の走行距離を算出する走行距離算出部と、所定の距離を走行するまでに、自車両が走行する車線に特定の道路標示を検出したときに、自車両が特定の車線を走行していると判定する特定道路標示存在判定部と、を備える。車線マーク検出部は、自車両が走行している車線の右側の車線マーク及び左側の車線マークを特定し、特定道路標示存在判定部は、特定の道路標示の位置が右側の車線マークの位置と左側の車線マークの位置の間であるとき、自車両が特定の車線を走行していると判定する。
(もっと読む)
物体検出装置および運転支援システム
【課題】周囲に存在する物体の部分のうち最も近接する位置にある部分までの距離の情報を的確に検出することが可能な物体検出装置を提供する。
【解決手段】物体検出装置1は、代表距離算出手段12が算出した各代表距離znをグルーピングして物体を検出する物体検出手段13を備え、物体検出手段13は、検出した物体の手前側に探索領域Rを設定し、探索領域R内での個々の距離zの情報の分布に基づいて、探索領域R内に物体の一部Bが存在すると判断した場合には、元の当該物体までの距離の情報Zと検出した当該物体の一部までの距離の情報Zbとの差分ΔZを算出して当該物体の情報に対応付け、当該物体の情報に差分ΔZが対応付けられている場合には、検出した当該物体までの距離Zから差分ΔZを差し引いた値を新たに当該物体までの距離Znewの情報として算出して出力する。
(もっと読む)
半導体集積回路およびその動作方法
【課題】道路白線の近傍を白い車両が走行している場合等において、道路白線の位置認識精度の低下を軽減する。
【解決手段】半導体集積回路1は、特に3次元画像処理機能14を具備する。映像入力装置10は、カメラ2で撮影される車両前方空間の映像信号を画像メモリ3に格納する。3次元画像処理機能14は画像メモリ3の前方空間の3次元遠近画像を平面視2次元画像に変換して、画像メモリ3に格納する。画像処理ユニット11、12は、画像メモリ3の平面視2次元画像の1フレームの濃度累積処理により道路白線を認識する。道路白線の認識後、表示装置4の画面に表示される表示画像データに認識された前記道路白線としての表示直線を描画する。映像出力装置13は、表示直線が描画された画像メモリ3の表示画像データを、表示装置4の画面に表示する。
(もっと読む)
運転支援装置
【課題】本発明は、運転者の煩わしさの低減を図ることができる運転支援装置を提供する。
【解決手段】本発明は、車両の運転者に対して車両周辺の障害物を回避するための運転支援を行う運転支援装置1であって、障害物を検出する障害物レーダ4と、運転者の運転操作を検出する運転操作検出部5と、障害物レーダ4の検出した障害物の車両に対するリスク度を算出するリスクマップ作成部13と、障害物レーダ4及び運転操作検出部5の検出結果に基づいて、運転者が障害物に対するリスク回避操作を行ったか否かを判定すると共に、リスク度の高さに応じて運転支援の内容を変更する支援判断部16と、を備え、支援判断部16は、運転者はリスク回避操作を行ったと判定した場合、当該障害物のリスク度が当該判定時点より高い段階における運転支援の内容を支援度の低い内容に変更することを特徴とする。
(もっと読む)
車線指示線検知装置
【課題】車線に沿って路面に描かれた車線指示線にICタグが配置されているときに、そのICタグに車線指示線を特定する情報を予め記憶させておくことなく車線指示線を検知することができる車線指示線検知装置を提供する。
【解決手段】路面20に配置されたICタグ5の車両1に対する相対位置が、送信部が所定の電波を送信してから受信部がICタグ5の発信波を受信するまでの時間に基づいて演算される。路面20の所定の範囲で検知された全てのICタグ5が少なくとも一つの集合に分類され、一つの集合に属するICタグ5のうち最も離間する2つのICタグ5,51及び5,52の距離が第2の所定距離以上であり、最も離間する2つのICタグ5を結ぶ直線53から一つの集合に属する全てのICタグ5までの距離がそれぞれ第3の所定距離以下である場合、一つの集合に属する全てのICタグ5が路面20に描かれた車線指示線22に含まれると推定される。
(もっと読む)
車線内車両検出装置及び車線内車両検出方法
【課題】高速道路の道路表面から所定の高さで設置されたステレオ画像撮像装置により、前方の高速道路を撮像したステレオ画像に基づき、ステレオ画像撮像装置に向かって進行して来る高速道路上の走行車線内の車両を検出して、ほぼリアルタイムで検出した車両の位置・速度を表示する車線内車両検出装置を提供する。
【解決手段】前方の自車線と隣接車線を撮像して基準画像と比較画像を出力するステレオ画像撮像装置と、基準画像と比較画像に基づき、視差画像を生成する視差画像生成部と、車線・車両検出処理部とを備え、車線・車両検出処理部は、基準画像と視差画像に基づき、ステレオ画像撮像装置に向かって進行して来る自車線及び隣接車線内の車両を検出して、検出した車両の位置を、走行車線を表す平面上の2次元位置として表示するとともに、検出した車両の速度と衝突までの時間をも表示する。
(もっと読む)
車両位置検出装置、車両位置検出方法、及び車両位置検出プログラム
【課題】広角画像を用いて行う、車線に対する車両の位置関係の検出の精度を良くする。
【解決手段】白線部分画像領域抽出処理S110は、道路を走行中の車両の走行方向に対する側方の方向を撮像した側方画像から、第一部分画像領域及び第二部分画像領域を抽出する。この2つの部分画像領域は、道路の路面上に描かれており当該車両が走行している車線の境界を表している白線の破線において当該破線の空線部分を挟み込んでいる白線部分が各々に映っている領域である。推定処理S112は、第一部分画像領域に映っている第一白線と第二部分画像領域に映っている第二白線とを滑らかに結ぶ推定線を側方画像上に推定する。この推定は、側方画像上での第一白線及び第二白線の各々についての線端の位置及び当該線端での向きに基づいて行われる。位置関係検出処理S113は、この推定線の側方画像上での位置に基づき、車線に対する車両の位置関係を検出する。
(もっと読む)
1 - 20 / 328
[ Back to top ]