
Fターム[5H180CC24]の内容
Fターム[5H180CC24]に分類される特許
61 - 80 / 328
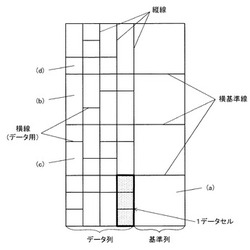
マーカ素子の設置方法及び識別方法
【課題】
マーカ素子の判別精度を格段に向上させ、マーカ素子の利用環境を拡大することが可能なマーカ素子の設置方法及び識別方法を提供すること。
【解決手段】
M系列状に配列されるマーカ素子を地面に設置するマーカ素子の設置方法において、該マーカ素子は、1つのブロック体のみ又は複数のブロック体を組み合わせることにより、サイズが異なる複数種類の四角形の表面を有するマーカ素子が少なくとも形成され、同一のサイズの該マーカ素子(a)を直線状に連続して配置する基準列と、該基準列の少なくとも一方の側に、該基準列に使用したマーカ素子と異なるサイズのマーカ素子(b)〜(d)をM系列状に配列するデータ列とを有することを特徴とする。
(もっと読む)
障害物検出装置

【課題】撮影画像と背景画像とに基づく差分画像を用いて的確に障害物を検出する障害物検出装置を提供する。
【解決手段】カメラCにより車両の周辺を撮影する。画像取得部11は、カメラCから所定時刻毎に撮影画像を取得し、位置情報取得部12は、画像取得部11が撮影画像を取得した時点の車両の位置情報を取得する。背景画像記録部HDには、背景画像がその撮影時の位置情報と関連付けられて記録されている。視点変換部13は、撮影画像と背景画像とをそれぞれ視点変換撮影画像と視点変換背景画像とに変換する。障害物検出部15は、視点変換撮影画像と視点変換背景画像との差分画像に基づいて、障害物を検出する。
(もっと読む)
車両用車線認識装置
【課題】コスト負担を抑制しつつ、投受光器との通信を行なう際に車両の走行している車線を認識することが可能な車両用車線認識装置を提供すること。
【解決手段】光ビーコンから情報を取得可能な車両に搭載される車両用車線認識装置であって、車両の位置を取得する車両位置取得手段と、地図データを記憶した地図データ記憶手段と、車両周辺を撮像する撮像手段と、前記車両位置取得手段により取得された車両の位置、及び前記地図データを用いて、前記光ビーコンが存在すると予想される所定エリアに車両が接近しているか否かを判定し、前記所定エリアに車両が接近していると判定した場合に前記撮像手段を作動させる制御手段と、を備える車両用車線認識装置。
(もっと読む)
車両用走行制御装置及びその方法
【課題】車線逸脱防止制御が作動し、かつ4WD状態になっている場合に、それら車線逸脱防止制御の作動及び4WD状態を適切に終了させる。
【解決手段】車両用走行制御装置は、制駆動力を制御して自車両にヨーモーメントを付与し走行車線に対する自車両の逸脱を防止する車線逸脱防止制御が作動し、かつ前後輪の駆動トルクを制御する4WD制御が作動している場合において(ステップS51、ステップS52)、車線逸脱防止制御の作動が終了し、かつ4WD制御の作動が終了するときには、それら終了が同時になされることを禁止する(ステップS53〜ステップS56)。
(もっと読む)
ドライバ状態監視装置、及び衝突制御システム
【課題】ドライバモニタコンピュータのデータ処理負荷を軽減すると共に、ドライバモニタコンピュータから発生する熱により車体に悪影響を与えることを防止したドライバ状態監視装置、及び衝突制御システムを提供する。
【解決手段】障害物を検出するミリ波レーダ102と、ドライバモニタカメラ104から取得するドライバの顔画像情報を用いて、ドライバの顔向き状態及び眼の開閉状態の情報を取得するドライバモニタECU105と、ミリ波レーダ102で検出された情報を用いて障害物までの衝突予測時間を演算すると共に、衝突予測時間が所定の閾値以下となる場合においてのみ、ドライバモニタECU105に作動開始の信号を送信するドライバサポートECU103とを備え、ドライバモニタECU105は、ドライバサポートECU103からの作動開始の信号を受信した場合にのみ、ドライバモニタカメラ104を用いたドライバ状態監視の処理を開始する。
(もっと読む)
居眠り防止装置
【課題】より快適に運転者を覚醒させる。
【解決手段】制御装置16は、車室内カメラ10aにより撮影された運転者の顔の撮影画像に基づいて運転者の眠気の強さの度合いを推定し、運転者の眠気の強さの度合いを示す眠気度を特定する。そして、運転者の眠気度が大きいほど運転者を覚醒させる度合いが強くなるように、運転者に異なる種類、異なる強さで刺激を与えることが可能な各装置12〜15、20〜22を制御する。
(もっと読む)
車両用制御装置
【課題】 ナビゲーションシステムおよび日射センサを使用しないで太陽の位置を検出し、空気調和装置を制御することのできる車両用制御装置を実現する。
【解決手段】 カメラ10により撮像した画像15を構成する各画素の輝度を走査し、閾値を超える輝度の画素から構成される領域が高輝度領域15d、つまり自車2に対する太陽の相対的な位置となる。高輝度領域15dが画像の中心線Pよりも左側に位置する場合は、エアコンシステム30の左側吹出口30bからの風量を増加させ、左側空間にいる乗員の体感温度の上昇を抑制する。
(もっと読む)
エコ運転支援装置、エコ運転支援方法
【課題】後続車両の存在を考慮してエコ運転することが可能なエコ運転支援装置及びエコ運転支援方法を提供すること。
【解決手段】自車両の車両挙動情報に基づきエコ運転中か否かを判定するエコ運転判定手段29と、エコ運転判定手段29によりエコ運転中と判定された場合、エコ運転中であることを示すエコ運転中情報を後続車両に送信する送信手段12、35と、を有し、後続車両に搭載されたエコ運転支援装置200が、後続車両の乗員に、自車両がエコ運転中であることを報知する、ことを特徴とするエコ運転支援装置を提供する。
(もっと読む)
道路区画線検出装置
【課題】左右の道路区画線のうち、一方の道路区画線が直線状区画線であり、他方の道路区画線がボッツドッツ等で構成される点列状区画線である場合でも、直線状区画線と点列状区画線を確実に検出することができる道路区画線検出装置の提供。
【解決手段】車線を規定する左側の道路区画線と右側の道路区画線が撮像されるように路面を撮像する撮像手段と、撮像手段により取得された撮像画像に基づいて、各道路区画線の特徴点を取得する特徴点取得手段と、特徴点取得手段により取得された特徴点を記憶する記憶手段と、記憶手段から読み出した特徴点に基づいて、各道路区画線を検出する区画線検出手段とを備え、記憶手段は、左側の道路区画線の特徴点を記憶する第1記憶領域と、右側の道路区画線の特徴点を記憶する第2記憶領域とを含み、記憶可能な特徴点の数は、第1記憶領域と第2記憶領域とで互いに独立に設定されていることを特徴とする。
(もっと読む)
車線認識装置、及び車線認識方法
【課題】車線認識の精度を向上させる。
【解決手段】走行路を撮像した画像内で、濃度変化が閾値以上となるエッジ点を検出し(ステップS5)、検出したエッジ点を生成した道路モデルと比較することで有効エッジ点を選別し(ステップS7)、選別した有効エッジ点に基づいて道路モデルを更新する(ステップS8)。有効エッジ点の選別は、先ずエッジ点を通り道路モデルに直交する直線を引き、エッジ点から道路モデルとの交点Pまでの距離dを求め、この距離dが座標用閾値Dthより小さいものを、有効エッジ点として選別する。又は、交点Pにおける道路モデルの接線ベクトルと、エッジ点のベクトルとのなす角度θdを求め、この角度θdが角度用閾値θthより小さいものを、有効エッジ点として選別する。
(もっと読む)
走行支援装置
【課題】車両を経路誘導するための走行支援制御と、障害物を回避するための走行支援制御とを両立し、運転者にとって、より安全に、違和感を少ない走行支援装置を提供する。
【解決手段】走行支援装置は、自車が進行しようとする経路上へ誘導するための第1のラインと、障害物との接触を回避するための第2のラインを生成する生成部と、 前記第1及び第2のラインのうち、少なくとも1つのラインと前記自車の位置関係に基づいて、当該自車を制御する制御部を備える。
(もっと読む)
車両用警報発生装置
【課題】安全地帯や幅の広い区画線に対しても的確な警報を発生させる車両用警報発生装置を提供する。
【解決手段】境界道路標示が幅広境界標示である場合(S140:YES)、自車線から逸脱する虞がある時に第1種警報を発生させ(S150:YES,S160〜S200)、境界道路標示を通り抜けて他車線に侵入する虞がある時に第2種警報を発生させる(S150:NO,S210〜S260)。しかも、より危険度の高い場面で発生する第2種警報を、第1種警報より危険度をより強くドライバに認識させることが可能な態様の警報(即ち、より強い警報)となるように設定する。
(もっと読む)
地図生成装置、走路推定装置、移動可能領域推定装置、及びプログラム
【課題】移動体の前方に存在する静止物の位置を精度よく記録した地図情報を生成することができるようにする。
【解決手段】レーザレーダ12によって、自車両の前方に存在する物体の位置を検出し、自車運動推定部18によって、自車両の運動を推定する。局所地図更新部20によって、前回更新された局所地図情報を、推定された現在の自車両の運動に基づいて、現在の自車両から見た局所地図情報に繰り返し更新する。局所地図情報が更新される毎に、存在確率変更部22によって、更新された局所地図情報において、検出された現在の物体の位置に対応するブロックの存在確率を増加させると共に、自車両から検出された現在の物体の位置までの直線上に存在するブロックの存在確率を減少させる。
(もっと読む)
移動体カメラシステム及び駆動方法
【課題】移動体7にカメラ4を搭載し、移動体7が曲がろうとする方向にカメラの撮像方向を向けて、曲がる方向の外景を撮像する。
【解決手段】移動体7が移動する方向を撮像するカメラ4と、カメラ4により撮像された実写像を表示する表示部6と、移動体7の移動方向の変化を検出して移動方向情報を生成する移動方向検出部2と、カメラ4の撮像方向を移動体7に対して変更するための撮像方向変更部3と、制御部5を備え、制御部5は、移動方向情報に基づいて撮像方向指示情報を生成し、撮像方向指示情報を撮像方向変更部3に与えてカメラ4の撮像方向を移動体7の移動方向が変化する方向に向ける。
(もっと読む)
駐車位置案内システムおよび駐車位置案内方法
【課題】ユーザに負担をかけることなく、車両の駐車位置を迅速かつ確実に案内できるようにした駐車位置案内システムおよび駐車位置案内方法を提供する。
【解決手段】車両が駐車場に駐車すると、車両に搭載されている車載カメラにより駐車位置情報表示体4A、駐車位置情報表示体4Bの2次元バーコードが撮像され、前記2次元バーコードの画像データをもとに前記2次元バーコードがデコードされ、駐車位置、駐車場名、最寄りの出入り口番号、駐車場とその駐車位置の各種地図情報を管理するサーバのURLを含む駐車位置を特定するための駐車位置特定情報を前記車両のユーザが携帯する携帯端末12へ表示する。また、前記駐車位置について詳細情報を得たい場合には、携帯する携帯端末12によりサーバ32のデータベース34へアクセスすることで駐車位置についてさらに詳しい地域地図情報、駐車場内地図情報などの詳細情報を得ることができる。
(もっと読む)
前照灯制御装置
【課題】 車両において撮像した自車の前方領域の画像における輝点オプティカルフローの属性を高い信頼度で推定して適切な前照灯の制御を可能にする。
【解決手段】 車両に設けられて配光が制御可能なヘッドランプLHL,RHLと、自車の少なくとも前方を撮像する撮像カメラ5と、撮像カメラ5で撮像した撮像画像に基づいて所要の演算を行ってヘッドランプの配光を制御する配光ECU1と画像処理ECU2を備える。撮像画像に基づいて道路形状を検出する道路形状検出部22と、検出した道路情報に基づいて少なくとも1つの属性についての基準オプティカルフローを生成する基準オプティカルフロー生成部23と、撮像画像中の対象となる輝点についてのオプティカルフローを計測する輝点オプティカルフロー計測部24と、基準オプティカルフローと輝点オプティカルフローとを比較し、この比較に基づいて対象となる輝点オプティカルフローの属性を推定する属性推定部25とを備える。
(もっと読む)
車載装置、及び当該装置で用いられる方法
【課題】走行している車線に応じて動作の開始タイミングを変更させることのできる、車載装置、及び当該装置で実行される方法を提供する。
【解決手段】区画線認識部102は、自車両の走行方向を撮像した画像に対してエッジ検出処理をしたエッジ画像に基づいて、当該画像に撮像されている区画線のエッジを認識する。区画線のエッジを認識すると、区画線認識部102は、認識したエッジに基づいて、自車両の車線の左右の区画線の数を計数する。追い越し車線判定部103は、区画線認識部102によって計数された区画線の数に基づき、走行している車線が追い越し車線であるか否かを判定する。変更指示部104は、追い越し車線判定部103によって追い越し車線であると判定されたとき判定情報を生成し、判定情報を取得した支援装置2に含まれる装置は動作の開始タイミングを変更して早める。
(もっと読む)
車速制御装置
【課題】車両の運転者によって制限速度が視認された場合にのみ自車両の速度変更を行い、運転者に不快感や違和感を与えるのを防止することができる車速制御装置を提供する。
【解決手段】車室内に配置され運転者による操作入力が可能なスイッチ6と、運転者の視点位置を検知する注視方向検出部5と、道路標識および道路標示の位置と運転者の視点位置とが一致した状態でスイッチ6からの入力があったことを判定する注視対象判定部7とを備え、速度制御部8は、注視対象判定部7により道路標識および道路標示の位置と運転者の視点位置とが一致した状態でスイッチ6からの入力があったと判定された場合に、自車両の速度が制限速度になるように速度制御を行うことを特徴とする。
(もっと読む)
駐車場施設コンピュータ管理システム
【課題】
利用者への情報照会、支払精算及び割引、予約等の便宜を提供する駐車場施設用コンピュータ管理システムを提供すること。
【解決手段】
入場発券時に車両番号を撮影し、画像から車両番号を抽出し、車番認証システムで車両番号を特定した情報と、駐車場の各駐車スペース1箇所当り1台ずつ設置された車両撮影用カメラによって、入庫した車両の車両番号から車番認証システムで特定した情報とをネットワーク上に設置したシステム制御用コンピュータによって管理把握し、入庫時間、料金精算、入庫場所の管理を効率化すると共に、インターネット経由で利用者の携帯電話WEBサービスから利用者に情報提供をする。
(もっと読む)
道路標示認識システム
【課題】処理負荷を増大させることなく、道路標示の認識精度を向上させることが可能な道路標示認識システムを提供すること。
【解決手段】道路標示認識システムは、道路標示に対する過去認識結果データ123に基づいて認識用パラメータを設定し(S240)、認識用パラメータを用いて画像230から道路標示Pを認識し、その認識結果と認識用パラメータに基づいて過去認識結果データ123を更新する処理を行う。これによれば、かすれ状況を含む不鮮明な道路標示Pに対して、同一地点を再走行したときに、過去認識結果データ123を用いて設定された認識用パラメータを用いて再度の認識処理を実行でき(S250)、道路標示Pの種別を積極的に認識することができる。従って、道路標示Pの認識率を向上させることができ、自車位置精度の向上を図ることができる。
(もっと読む)
61 - 80 / 328
[ Back to top ]