
Fターム[5H180CC24]の内容
Fターム[5H180CC24]に分類される特許
21 - 40 / 328
道路曲率推定装置
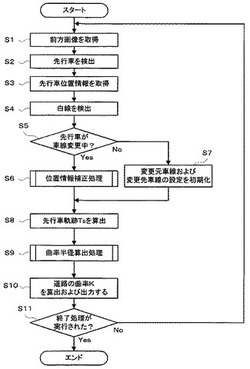
【課題】自車両が進行する道路の曲率を正確に推定可能とする道路曲率推定装置を提供する。
【解決手段】自車両の前方の道路の曲率を推定する道路曲率推定装置であって、自車両の前方を走行する先行車の走行軌跡を算出する先行車軌跡検出手段と、自車両の前方を写した前方画像を撮像する撮像手段と、先行車が車線変更したか否かを、前方画像中における先行車および白線の位置関係に基づいて判定する車線変更判定手段と、先行車が車線変更中である場合、先行車の走行軌跡を当該車線変更先の車線に沿うように補正する先行車軌跡補正手段と、先行車の走行軌跡に基づいて道路の曲率を推定する曲率推定手段とを備える道路曲率推定装置である。
(もっと読む)
画像認識システム、方法、及び、プログラム

【課題】処理量で、対称線分図形を検出することができる画像認識システムを提供する。
【解決手段】検出対象の対称線分図形は、左右対称であり、垂直線分対と斜線分対とを有する。垂直線分対検出手段22は、対称線分図形を含む入力画像から、垂直線分対上を通る一対の垂直線を検出する。中央線検出手段23は、検出された一対の垂直線の中央を通る中央線を検出する。対称斜線分対検出手段24は、検出された中央線上の切片をパラメータの1つとした直線パラメータ表現に基づき、入力画像から、斜線分対上を通る一対の斜線を検出する。判定手段25は、入力画像における、検出された一対の垂直線及び斜線の周囲に対応する領域内の画素と、周囲外の領域の画素とに基づいて、対称線分図形の存在の有無を判定する。
(もっと読む)
車両用運転特性検出装置、車両用運転特性検出方法および自動車
【課題】運転者の特性をより高精度に検出すること。
【解決手段】自動車1Aは、車両用運転特性検出装置1を備え、車両走行状態の分布を取得する。そして、取得した分布について複数の統計指標を算出し、これらの組み合わせを基に、車両走行状態の分布に歪みがあるか否かを判定する。自動車1Aは、車両走行状態の分布に歪みがあると判定した場合、その分布を基に、運転者の限界値を検出する。このとき検出した運転者の限界値は、そのときの走行状況において、運転者が積極的な運転操作を行い、適正であると考える範囲からの逸脱を回避したことに依拠した値である。したがって、運転者の特性をより高精度に検出することができる。
(もっと読む)
車両用運転状態検出装置、車両用運転状態検出方法および自動車
【課題】運転者の運転状態をより適切に検出すること。
【解決手段】自動車1Aは、車両用運転状態検出装置1を備え、車両走行状態(車間時間THW)の分布を取得する。そして、取得した分布について複数の統計指標を算出し、これらの組み合わせを基に、車両走行状態の分布に歪みがあるか否かを判定する。自動車1Aは、車両走行状態(車間時間THW)の分布において歪みを検出した場合、運転者が先急ぎ運転を行っていると判定し、音および表示によって、運転者が先急ぎ運転を行っていることに対する報知を行う。したがって、運転者の運転状態をより適切に検出することができる。
(もっと読む)
車両用運転状態検出装置、車両用運転状態検出方法および自動車
【課題】運転者の運転状態をより適切に検出すること。
【解決手段】自動車1Aは、車両用運転状態検出装置1を備え、車両走行状態(車線内横位置L)の分布を取得する。そして、取得した分布について複数の統計指標を算出し、これらの組み合わせを基に、車両走行状態の分布に歪みがあるか否かを判定する。自動車1Aは、車両走行状態(車線内横位置L)の分布において歪みを検出した場合、運転者が漫然運転を行っていると判定し、音および表示によって、運転者が漫然運転を行っていることに対する報知を行う。したがって、運転者の運転状態をより適切に検出することができる。
(もっと読む)
ドライバ状態判定装置及びプログラム
【課題】ドライバの意識低下状態を精度良く判定することができるようにする。
【解決手段】操舵角センサ12、横位置検出部14、及び車速センサ16を用いて、自車両の走行状態及びドライバが自車両を操作したときの操作状態を検出する。無操舵判定部28によって、検出された走行状態又は操作状態に基づいて、無操舵状態であるか否かを判定する。逸脱危険度算出部30によって、自車両が車線を逸脱する可能性の高さを示す車線逸脱危険度を算出する。運転意識低下状態判定部32によって、無操舵判定部28による判定結果、及び算出された車線逸脱危険度が閾値以上であるか否かに基づいて、ドライバの意識低下状態を判定する。
(もっと読む)
運転支援装置
【課題】 車両後退時に最終的に達成したい操作目標に対する進捗状況を暗示的に音を用いて運転者に簡単かつ効果的に報知する運転支援装置を提供することである。
【解決手段】車両後退時にリバース音を出力して運転を支援する運転支援装置50。車両状態及び車両周辺状態を含む運転支援情報を取得する情報取得部51と、リバース音を主音とみなした音階に属するリバース音を音階リバース音として管理するリバース音管理部52と、運転支援情報に適応する時系列的なリバース音の音階の流れを決定する出力リバース音決定部53と、リバース音管理部によって管理されているリバース音から出力リバース音決定部によって決定された音階の流れに適するリバース音を選択してスピーカに出力するリバース音出力制御部54とが備えられている。
(もっと読む)
運転支援装置
【課題】輪留めとタイヤとの位置関係などを運転者に表示する運転支援装置を低コストにて提供可能とする。
【解決手段】CCDカメラによって撮影された画像と、車両のタイヤ位置や車体位置などの基準位置を示す画像とを組み合わせた合成画像を生成し、その合成画像上に、目印マーカーを表示する。目印マーカーは、車両が移動したとき、車両の移動方向とは逆方向に、車両の移動距離分だけ合成画像上を移動するように表示される。このため、車両の周囲に輪留めや障害物があった場合に、それらが車体の陰に隠れるなどして、CCDカメラの撮影範囲外となっても、輪留めや障害物に対応する位置に表示された目印マーカーを用いることにより、合成画像上において、その目印マーカーと車両との基準位置との接近度合を確認することができる。
(もっと読む)
駐車支援装置及び方法
【課題】複数の駐車枠位置や複数の駐車経路が存在するような場合でも、運転者の操作負担を最小化できる駐車支援装置を提供する。
【解決手段】駐車枠位置取得部21は、車載のカメラ3〜6の画像から一つもしくは複数の駐車枠位置を取得する。車両状態検出部22は、車輪速度センサ7〜10の検出信号から自車両の位置及び姿勢を検出する。駐車経路生成部23は、車両状態検出部22が検出した自車両の位置及び姿勢と、駐車枠位置取得部21が取得した駐車枠位置に基づいて、それぞれの駐車枠位置への駐車経路を生成する。評価部24は、それぞれの駐車経路に対する運転者の操作負担を評価し、この評価結果に基づいて、駐車経路選択部25は、運転者の操作負担が最小な駐車経路を選択し、車載モニタ13へ表示する。
(もっと読む)
車線認識装置、及び車線認識方法
【課題】走行車線の認識結果を取扱う制御系の信頼性を向上させる。
【解決手段】先ずレーンマーカの候補点が、明らかに誤検出であるか否かを判断し、候補点の誤検出が明らかであれば(ステップS104の判定が“Yes”)、道路モデルを初期化するリセット処理を行う(ステップS105)。一方、候補点の誤検出が不明であれば(ステップS104の判定が“No”)、候補点の検出結果に連続性があるか否かを判断し、候補点の検出結果に連続性がないと判断したら(ステップS106、S109、S110の何れかの判定が“Yes”)、一時的に外乱の影響を受けている可能性があるので、道路モデルの更新を中止する、つまり道路パラメータの今回値を削除し、前回値を保持するロスト処理を行う(ステップS107)。
(もっと読む)
路面標示認識装置
【課題】従来の路面標示認識装置は、カメラでの撮影画像全体を領域分割した後、2次元平面への投影などの変換処理を行うので、CPU負荷が大きく、また、検知ライン上の明るさの変化位置に基づき路面標示を認識する計算量抑制方法は、自車両前方に他車両が位置し、路面標示の一部を隠蔽した場合、路面標示を正しく認識できない。
【解決手段】画像入力手段で得られた自車両の走行路を含む所定領域を撮影した画像中の、部分領域を監視領域とし監視領域設定手段で設定し、監視領域から、画像特徴を画像特徴抽出手段で抽出し、この特徴抽出手段で得られた特徴と、路面標示モデル記憶手段に予め格納されている路面標示モデルとをHMMを用いてHMM識別手段で比較評価して路面標示の認識を行う。
(もっと読む)
生体状態推定装置
【課題】運転者の覚醒度が低下し始める初期状態を推定することができる生体状態推定装置を提供する。
【解決手段】運転者の生体状態を推定する生体状態推定装置1であって、運転者の操舵を取得し、走行車線に対する車両の走行位置を取得する入力部10と、走行車線内において運転者が走行車線からの逸脱を意識する範囲である通常走行域R及び走行位置に基づいて通常走行域Rからの逸脱を判定し、通常走行域Rの逸脱に対する操舵変化に基づいて、運転者の覚醒度の低下を判定する覚醒度低下判定部11と、を備えることで、運転者の覚醒度が低下し始める初期状態を推定することができる。
(もっと読む)
分岐路進入判断装置及び分岐路進入判断方法
【課題】道路上の指標が認識できない場合であっても、車両が分岐路に進入したことを判断できる分岐路進入判断装置等を提供する。
【解決手段】分岐路に進入する位置P1にて、(1)分岐情報を取得し、(2)車線幅平均値LaneW_AVEを算出し、(3)右側白線種別と左側白線種別を認識しておく。位置P2まで進行すると、(4)車線幅の広がりを検出し、位置P3にて、(5)左側白線は実線検出を継続するが右側白線はロスト状態となる。その後、位置P5まで進入すると、(6)右側白線のロスト状態から復帰し、これにより、分岐路に進入したことを判定できる。
(もっと読む)
運転誘導装置
【課題】潜在的な危険に対する安全性をより向上させ、有益な情報を提供することが可能な運転誘導装置を提供する。
【解決手段】判定処理ECU40が、自車両V0の通過領域である移動領域TRと、自車両V0の周辺に潜在的に存在する移動体V1等について、移動体V1等の通過領域である移動領域TRを予測する。判定処理ECU40は、予測した自車両V0と移動体V1等との移動領域TRとの重複領域に基づいて、移動領域TRの重要度Iを算出するため、潜在的な危険に基づいて自車両V0が通過する領域における運転の難易度を算出できる。判定処理ECU40は、算出した重要度IとドライバーDの運転技量Tとに応じて自車両V0が将来走行すべき経路を設定し、運転支援ECU50が設定した経路にドライバーDを誘導するため、潜在的な危険に対する安全性をより向上させ、有益な情報を提供することが可能となる。
(もっと読む)
分岐路進入判断装置及び分岐路進入判断方法
【課題】自車両が分岐路に進入したことを確実に検出することができる分岐路進入判断装置等を提供する。
【解決手段】自車両の前方方向に分岐路が存在することを検出した場合に、単眼カメラ3により撮像した撮像画像に基づいて、カメラコントローラ4により認識された右側白線認識結果と左側白線認識結果との組み合わせから、コントローラ10が、自車両が分岐路に進入したと判断する。自車両が分岐路に進入した場合に、ナビゲーション装置2の位置補正部2dにより位置を補正できる。
(もっと読む)
走行制御装置
【課題】退出路の手前で退出の意図が検出されても減速を開始せず、退出路の先頭位置を通過してから減速を行う走行制御装置を提供する。
【解決手段】走行制御装置1は、本線110から退出路120への退出意図を検出し、車両2が退出路120の先頭位置123を通過したか否かを判断し、退出意図が検出されかつ車両2が退出路120の先頭位置123を通過したと判断された場合に車速制御部50により減速制御を行わせる。
(もっと読む)
車線認識装置、及び車線認識方法
【課題】車線認識による道路曲率の算出において、ノイズの影響を抑制しつつ、応答性を向上させる。
【解決手段】画像から道路曲率ρを算出し(ステップS1)、旋回挙動から旋回曲率κを算出する(ステップS2)。そして、道路曲率ρと旋回曲率κとの差分が閾値th1よりも大きく、且つ旋回曲率κに対して道路曲率ρが接近傾向にあれば(ステップS4又はS9の判定が“Yes”)、道路曲率ρに対するノイズの影響度合が小さく、単なる応答遅れであると判断し、道路曲率ρに対する平滑度合を弱める(ステップS5、S10)。一方、旋回曲率κに対して道路曲率ρが離間傾向にあれば(ステップS4又はS9の判定が“No”)、道路曲率ρに対するノイズの影響度合が大きく、単なる応答遅れではないと判断し、道路曲率ρに対する平滑度合を強める(ステップS6、S11)。
(もっと読む)
車線判定装置及びナビゲーションシステム
【課題】片側複数車線の道路を走行している自車の走行車線を迅速且つ正確に判定することができる車線判定装置を提供する。
【解決手段】車線判定装置100は、片側複数車線道路Bの進入口に予め設定された基準位置402、502を検出し、その基準位置402、502からの進入距離Lと地図情報に基づいて、自車400が片側複数車線道路Bの走行車線B1〜B3のいずれを走行しているのかを判定する。
(もっと読む)
車線判定装置及びナビゲーションシステム
【課題】自車が走行している車線を短時間で判定することは困難である。
【解決手段】片側複数車線道路を走行している自車の走行車線を判定する車線判定装置は、道路形状を取得する道路形状取得手段と、道路を撮像する撮像手段と、撮像手段により撮像された画像から区画線を認識する区画線認識手段と、区画線認識手段により認識された区画線から撮像手段までの距離を繰り返し算出して自車の軌跡を算出する第一の軌跡算出手段と、道路形状取得手段により取得された道路形状及び自律航法に基づいて自車の軌跡を算出する第二の軌跡算出手段と、第一の軌跡算出手段により算出された第一の軌跡及び第二の軌跡算出手段により算出された第二の軌跡に基づいて自車の軌跡を算出する第三の軌跡算出手段と、第三の軌跡算出手段により算出された第三の軌跡に基づいて自車の走行している車線を判定する走行車線判定手段と、を備える。
(もっと読む)
車両用運転支援装置
【課題】車線逸脱に対する警報をよりドライバのフィーリングに合致したタイミングで行うことができる車両用運転支援装置を提供する。
【解決手段】制御ユニット5は、自車両1前方で認識した白線に沿って警報判定用ラインを設定し、当該警報判定用ラインと自車両との相対的な位置関係に基づいて車線逸脱警報を行う場合において、左右の白線H1,H2に沿って設定した基準となる警報判定用ラインwl,wrに対する補正量Dl,Drを予め設定された条件に基づいてそれぞれ演算し、白線H1,H2の外側或いは内側に対して各警報判定用ラインwl,wrを補正量Dl,Drだけオフセットさせて最終的な警報判定用ラインWl,Wrを設定する。
(もっと読む)
21 - 40 / 328
[ Back to top ]