
Fターム[5H180LL06]の内容
Fターム[5H180LL06]の下位に属するFターム
音による警報であるもの (2,307)
音以外の警報であるもの (2,573)
Fターム[5H180LL06]に分類される特許
241 - 260 / 581
車載電子装置、車両用通信システム
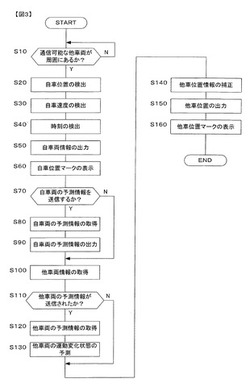
【課題】他車両の位置を正確に求めることができる車載電子装置を提供する。
【解決手段】他車両から送信される他車両情報を取得し(ステップS100)、取得した他車両情報に含まれる他車位置情報を、その他車両情報に含まれる他車位置の検出時刻情報および他車速度情報に基づいて補正する(ステップS140)。さらに、他車両から予測情報が送信された場合は、その他車両の予測情報を取得し(ステップS120)、取得した予測情報に基づいて、他車両の運動状態の変化を予測する(ステップS130)。この予測結果に基づいて他車位置情報を補正する。
(もっと読む)
情報提供判定装置、車載装置および電子化交差点システム

【課題】交差点で発生する衝突事故を未然に防止することを目的とし、移動体に必要な警告情報のみを提供することが可能な情報提供判定装置、車載装置および電子化交差点システムを得る。
【解決手段】本発明の電子化交差点システムは、交差点に進入する第1移動体9bの交差点進入前の挙動情報、および交差点に進入する第2移動体9aの挙動情報を取得する移動体挙動情報取得手段と、少なくとも交差点付近の一部を覆う通信エリア2a−1に進入する第2移動体9aと通信する通信手段と、第1移動体9bの挙動情報、第2移動体9aの挙動情報、信号情報、交差点情報、警告情報、配信制御情報、および時刻情報に基づいて、第1移動体9bに関する警告を第2移動体9aの車載装置で再生するか否かを判定する情報出力判定手段とを備えたものである。
(もっと読む)
歩行者警報装置
【課題】運転者あるいは歩行者が気付いている場合においては警報を発生せず、衝突の可能性があり、真に危険と判断される場合に限定して警報を発生する歩行者警報装置の実現を目的とする。
【解決手段】対象を検知するレーダ1、及び対象の画像を取得する赤外線カメラ2を備え、更に、レーダ1からの対象検知データ、及び赤外線カメラ2からの画像データに基づき検知した対象を歩行者と認識し、その座標を認識する歩行者認識手段3と、歩行者認識手段3により認識した歩行者の相対移動方向を算出する歩行者相対移動方向認識手段4と、歩行者の相対移動方向に基づき警報発生を判定する警報判定手段5と、警報判定手段5の出力に基づき警報を発生する警報手段6とを備えた歩行者警報装置で、歩行者の当該自車両の進行方向に対する直角方向の移動成分があると判断された場合に限定して警報する。
(もっと読む)
車載用走行環境認識装置
【課題】
より精度の高い車載用画像認識処理装置を提供する。
【解決手段】
車両の外部を撮像する車載カメラ3a,3bからの信号を入力する入力部3と、入力部3で入力した画像信号を処理して外部環境の認識を妨げる要因を有する第1の画像領域を検出する画像処理部16と、画像処理部16によって検出された第1の画像領域の大きさ,位置、または第1の画像領域を有する車載カメラ3a,3bの設置場所の少なくともいずれか一つに基づいて、環境認識処理を行う第2の画像領域を決定する処理画像決定部17と、処理画像決定部17によって決定された第2の画像領域に基づいて車両の外部環境を認識する環境認識部20とを有する車載用走行環境認識装置。
(もっと読む)
車両周辺監視装置
【課題】的確な運転を支援し得る車両周辺監視装置を提供する。
【解決手段】監視装置20では、モニタECU21は、障害物を検出したソナーユニット23aから距離データDtaを取得した場合、それまでにディスプレイ27に表示されていた画像に換えて撮像カメラ25aによる画像データCtaに基づいて前右コーナ部分の周囲状況で障害物を含む前右画像をディスプレイ27に表示させる。これにより、車両の前右コーナ部分100aの周囲に障害物が存在している場合には、当該障害物が存在する角部の周囲が他の画面に優先してディスプレイ27に表示されるので、当該障害物が存在しない他の角部等に惑わされることなく、当該車両の運転者は障害物が存在する角部に対して注意を向けることができる。したがって、的確な運転を支援することができる。
(もっと読む)
通信システム、車載機、車両及び送信機
【課題】自車の走行位置を精度良く特定することができ、自車の進行方向前方の所定位置までの距離を精度良く求めることができる通信システム、該通信システムを構成する車載機及び送信機並びに該車載機を備える車両を提供する。
【解決手段】車載機20で自車が光ビーコン10との通信可能な領域Aに存在すると判定した場合、車載機20が記憶している領域Aの位置情報、送信機30、40の位置情報、領域Aの上流端から停止線Pまでの距離、送信機30、40から送信された各信号の到達時間差に基づいて、領域Aにおける自車の位置を高精度に特定するとともに、停止線Pまでの距離を高精度に算出する。
(もっと読む)
障害物検出装置、車両用表示装置及び障害物検出方法
【課題】コストの増大を抑制し、車両に設置された撮像装置によって得られる画像中の多様な障害物を検出することができる障害物検出装置を提供すること。
【解決手段】本発明の一態様に係る障害物検出装置は、車両に設置されたカメラ101によって連続して撮像された画像に基づいて、画像に含まれる検出対象点の画面上での動きベクトルを算出する動きベクトル算出部113と、車両の走行情報に基づいて、検出対象点の期待動きベクトルを算出する期待動きベクトル算出部114と、動きベクトルが、期待動きベクトルよりも第1の閾値より大きい場合、検出対象点が障害物上の点であると判定する異常動きベクトル検出部116とを備える。
(もっと読む)
警戒対象検出装置、警戒対象検出機能を有する車両および警戒対象検出装置を用いた警戒対象存在情報提供システム
【課題】電波の反射がある環境下においても状況の変化に対応して迅速に警戒対象の存在位置や方向を判定することができる警戒対象検出装置および警戒対象検出装置を用いた警戒対象存在情報提供システムを提供する。
【解決手段】本発明の警戒対象検出装置は、車両の周辺に存在する警戒対象を検出する警戒対象検出装置であって、少なくとも一対以上であり、車両に対して対の位置関係に設置される複数のアンテナと、前記複数のアンテナの各アンテナで受信した電波の受信レベルを検出する受信レベル検出手段と、前記複数のアンテナのうち、対の位置関係に配置された各アンテナに対応する前記受信レベル検出手段により検出した受信レベルを比較し、比較結果に基づいて、車両に対する電波の発信源の相対方向を判定する方向判定手段とを備える。
(もっと読む)
飲酒運転防止装置および飲酒運転防止システム
【課題】低い通信コストで常時監視を行い、飲酒運転を防止する。
【解決手段】運転席内の大気中のアルコール濃度を測定する大気中アルコール濃度測定機10と、運転者の呼気を吹き込むことにより呼気中のアルコール濃度を測定する呼気中アルコール濃度測定機11と、大気中アルコール濃度測定機10により常時測定される運転席内の大気中のアルコール濃度を監視し、所定の閾値を超えた場合に監視センタへ通知する飲酒可能性通知手段12と、大気中アルコール濃度測定機10により測定される運転席内の大気中のアルコール濃度が所定の閾値を超えた場合に呼気中アルコール濃度測定機11により測定した呼気中のアルコール濃度のデータを監視センタへ送信する呼気中アルコール濃度送信手段13とを備える。
(もっと読む)
車両用乗員保護装置
【課題】車両の衝突回避操作に際し、シートベルト未装着の乗員を確実に保護する車両用乗員保護装置を提供する。
【解決手段】乗員保護装置において、障害物との衝突可能性を予測する衝突発生予測手段と、上記衝突発生予測手段による衝突発生予測に応じて、衝突を回避するよう車両制御する衝突回避手段と、シートベルトを装着していない乗員を検知するベルト未装着乗員検知手段と、上記ベルト未装着乗員検知手段により検知されたベルト未装着の乗員に対し、該乗員に安全姿勢をとらせるよう誘発する安全姿勢誘発手段と、を設ける。上記ベルト未装着の乗員を検出したとき、上記安全姿勢誘発手段を作動させた後、所定条件の成立時に上記衝突回避手段を作動させる。
(もっと読む)
状態推定装置および車両
【課題】小型かつ低価格を維持しながら、車両の周囲の状態を自動的に監視することができる装置を実現する。
【解決手段】所定形状の図形を所定の方向に複数投影し、投影された図形を撮影し、撮影された複数の投影された図形を予め用意された基準パターンと比較し、この比較結果に応じて図形の投影先の状態を推定する。基準パターンは、予め用意する。あるいは、複数撮影された画像の中から最も重複枚数の多い図形パターンを基準パターンとして決定する。あるいは、基準パターンを用いずに、前回撮影された図形と今回撮影された画像とを比較する。この状態推定装置を車両に備え、車両の左右側面または左右後端から地面に向けて所定形状の図形を投影することにより、投影先の状態がほぼ平坦路であるか否かを推定させ、ほぼ平坦路ではないと推定されたときには、警報を出力する。
(もっと読む)
前方監視装置、前方監視プログラム、及び前方監視方法
【課題】車両に接近している障害物を確実に検出する。
【解決手段】動き検出器15において、現画像は前画像と比較され、動きベクトルが検出される。現画像は抽出器16に送られ、フレーム左半分から、動きベクトル左右方向成分が右向きの互いに隣接する複数の画素ブロックが一体として抽出され、フレーム右半分から、動きベクトル左右方向成分が左向きの互いに隣接する複数の画素ブロックが一体として抽出される。さらに、フィルタ17において、抽出器16によって抽出された画素ブロックであって、車両近傍を表示する空間的範囲の外から抽出されたものが除外される。抽出器16によって抽出され、且つ、フィルタ17によって除外されなかった画素ブロックが、車両に接近している障害物として検出される。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援プログラム
【課題】車両周囲の障害物情報をユーザにわかり易く提供する運転支援装置を提供する。
【解決手段】車両周囲の障害物情報をユーザに提供する運転支援装置であって、車両周囲を撮像した撮像画像を処理することによって、及び/又は照射した音波、電波、又はレーザの反射波を受信することによって、車両周囲の障害物の有無、障害物までの方向、及び距離を検知する物体検知部と、物体検知部の位置から車両周囲の障害物の位置までの少なくとも方向を表す線分図形を生成する線分図形生成部と、撮像画像に、線分図形生成部が生成した線分図形を重畳表示して、当該車両周囲の障害物情報をユーザに提供する表示制御部とを備える。
(もっと読む)
車両通信装置及びコンピュータプログラム
【課題】車両間での通信に際し、通知情報の送信先となる車両の選択等の操作を運転者が行うことにより生じる危険な状態を回避し、安全性を向上させることが可能な車両通信装置及びコンピュータプログラムを提供する。
【解決手段】複数台の撮影装置20,20,…を車両1の周囲に配設する。そして車両通信装置10は、方向指示器操作、前照灯点滅操作等の運転操作に関する情報、走行速度、後方の車両との車間距離等の走行に関する情報、及び走行している車線位置、道路区分、歩道との位置関係、他の車道との位置関係等の道路に関する情報から自車両の状況を検出し、検出した状況に基づき所定のテーブルを参照して、通知すべき通知情報及び他車両の存在有無を確認すべき方向を決定し、決定した送信方向の車両を検出する撮影装置20により検出した他の車両へ、通知情報を送信する。
(もっと読む)
移動体周囲危険度判定方法、装置、およびプログラム
【課題】予想される移動体の周囲の状況の変化をふまえて移動体の周囲の危険度を判定することができ、移動体の安全な走行を実現させることができる移動体周囲危険度判定方法、装置、およびプログラムを提供する。
【解決手段】障害物がとりうる進路を確率的に予測する一方、移動体の進路を生成し、障害物がとりうる進路のうち、移動体の進路と干渉する進路を求めることにより、移動体と障害物との衝突確率を計算する。移動体の周囲の危険度を判定する際には、移動体と周囲の障害物との最新の衝突確率、および当該最新の衝突確率と所定時間前の衝突確率との時間変化量を用いて判定を行う。
(もっと読む)
画像認識装置、画像認識方法および電子制御装置
【課題】画像認識において対象物の位置の認識精度を向上すること。
【解決手段】入力画像に対して探索窓F1を横方向移動させながら、探索窓F1内の画像と歩行者像に対応する基準パターンとの一致度の推移を取得する。そして、一致度が高い領域の幅W11〜W13のうち、探索窓F1の大きさを基準とした所定範囲内の幅を有する領域に歩行者が存在すると判定する。また、上下方向についても同様であり、探索窓を移動させながら基準バターンとの一致度の推移を取得し、一致度の高い領域の幅(W21,W22)とその高さにおける探索窓の縦方向の幅とを比較して、歩行者の有無を判定する。
(もっと読む)
車両用周辺監視装置
【課題】車両の衝突の回避又は軽減を図るために、車両の前方及び前側方の物体を監視する車両用周辺監視装置を提供することを課題とする。
【解決手段】
車両用周辺監視装置は、車両の前方で物体を検知する前方監視レーダ110、車両の左前側方で物体を検知する左前側方監視レーダ120、車両の右前側方で物体を検知する右前側方監視レーダ130、自車両の進行方向を検知する進行方向判定部143、及び、監視部144を備える。監視部144は、静止物体については、前方監視レーダ110、左前側方監視レーダ120及び右前側方監視レーダ130のうち、進行方向判定部143によって検知された自車両の進行方向に検知範囲を有する監視レーダのみで監視し、移動物体については、自車両の進行方向に応じて、前方監視レーダ110、左前側方監視レーダ120及び右前側方監視レーダ130に優先順位をつけて監視する。
(もっと読む)
車両衝突管理装置
【課題】車両同士の衝突事故時に加害車両から送信される車両情報や事故情報を確実に記録し、衝突事故の原因解明や事後処理に役立てる。
【解決手段】車両に加わる衝撃を検知する衝撃センサ24と接続される処理部26と、前記処理部26と接続され、車外との送信装置21bおよび受信装置21aとをそれぞれ接続する送信部23および受信部22と、前記処理部26と接続され、衝撃検出時における前記自車両の車両情報および前記受信部22で受信する他車両の車両情報を記録する記録部25を備えて車両衝突時に衝突車両間で互いの車両情報を送受信し、夫々の車両の記録部25に衝突相手方の車両情報を記録させる。
(もっと読む)
車両用周辺監視装置
【課題】車両の衝突の回避又は軽減を図るために、車両の前側方の物体を監視する車両用周辺監視装置を提供することを課題とする。
【解決手段】
左前方監視レーダ110は、車両の左前方に検知範囲を有し、右前方監視レーダ120は、車両の右前方に検知範囲を有する。左前方監視レーダ110の検知範囲の中心軸と車両中心軸とのなす第1の角度は、右前方監視レーダ120の検知範囲の中心軸と車両中心軸とのなす第2の角度よりも大きく設定されている。これは左側通行の道路環境用の設定である。PSC・ECU130は、監視部131と設定部132を有する。監視部131は、左前方監視レーダ110と右前方監視レーダ120から受ける検知信号に基づき車両前側部の物体を監視する。設定部132は、車両の仕向国の交通環境に応じて、左前方監視レーダ110と右前方監視レーダ120の検知範囲と車両中心軸との関係を切り換える。
(もっと読む)
車両用運転支援評価システム
【課題】車両の走行状態だけでなく個々のドライバの主観を反映した最適な運転支援を実行できる車両用運転支援評価システムの実現。
【解決手段】ドライバの状態を検出するドライバ状態検出部23と、車両の走行状態を検出する車両状態検出部24と、車両の走行状態に応じてドライバに対する運転支援を実行する運転支援制御部11〜14と、運転支援の実行後に当該運転支援に関するドライバの主観評価を取得する主観評価取得部22と、主観評価、ドライバ状態及び車両の走行状態から運転支援の有効性を評価し、評価結果に基づき運転支援制御を最適化する有効性評価部25とを有する。
(もっと読む)
241 - 260 / 581
[ Back to top ]