
Fターム[5H180LL06]の内容
Fターム[5H180LL06]の下位に属するFターム
音による警報であるもの (2,307)
音以外の警報であるもの (2,573)
Fターム[5H180LL06]に分類される特許
181 - 200 / 581
運転補助装置
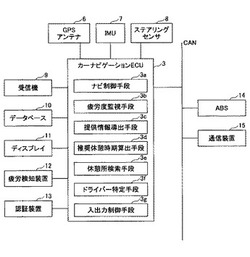
【課題】より効果的に運転の安全性を高めることができる運転補助装置を提供すること。
【解決手段】本発明による運転補助装置1は、ドライバーの入力した目的地と地図情報から前記目的地までのルート情報を探索するナビ制御手段3aと、ドライバーの疲労度を監視して疲労度が所定閾値以上である場合にドライバーが疲労していると判定する疲労度監視手段3bと、路側のセンターからドライバーの嗜好情報を取得する提供情報導出手段3cを備えることを特徴とする。
(もっと読む)
運転者支援装置

【課題】個々のドライバに応じて適切な支援を行う運転者支援装置を提供する。
【解決手段】車両周辺に存在する予め定められた対象物の位置を含む対象物情報を検出する対象物情報検出手段と、前記車両を運転する運転者の視線の方向、及び当該方向を前記運転者が目視していた時間を含む視線関連情報を検出する視線関連情報検出手段と、前記運転者の記憶保持時間を示す記憶保持時間情報が予め記録された記録手段と、前記対象物検出手段により検出された前記対象物情報、前記視線関連情報検出手段により検出された前記視線関連情報、及び前記記録手段により記録された前記記憶保持時間情報に基づき危険度を算出する算出手段と、前記算出手段により算出された危険度が予め定められた閾値を超えた場合に、前記運転者に対して警告を発生する警告発生手段と、を有する。
(もっと読む)
脇見検出装置および方法、並びに、プログラム
【課題】運転者の脇見の危険度をより正確に認識する。
【解決手段】視線方向検出部21は、カメラ11により撮影された運転者の顔画像に基づいて、運転者の視線の方向を検出する。脇見検出部22は、運転者の視線の方向に基づいて運転者の上下方向および左右方向の脇見を検出するとともに、運転者が上下左右のいずれの方向に脇見をしているかに基づいて危険度を判定する。本発明は、例えば、車載用の脇見検出装置に適用することができる。
(もっと読む)
運転支援装置及び警告情報伝達装置
【課題】合図の誤りによって発生する事故を防止することができるようにする。
【解決手段】情報受信部34によって、自車両の周辺に存在する他車両から、他車両が提示しているウィンカ合図を示すウィンカ合図情報と、他車両に搭載されたカーナビゲーション装置によって案内されている経路を示す経路案内情報及び他車両の経路履歴を示す経路履歴情報とを含む他車両情報を受信する。そして、第1行動予測部38によって、受信したウィンカ合図情報に基づいて、他車両の行動を予測し、第2行動予測部40によって、受信した経路案内情報及び経路履歴情報に基づいて、他車両の行動を予測する。そして、ミスマッチ判定部42によって、第1行動予測部38によって予測された行動と、第2行動予測部40によって予測された行動とがミスマッチであると判定されたときに、出力部44によって警告メッセージを音声出力する。
(もっと読む)
外界認識装置
【課題】
衝突判定を行う場合、自車情報に異常が発生するとシステムの機能が著しく低下する。
【解決手段】
外界認識装置は、自車の情報を取得する自車情報取得手段と、外界認識センサが検知した物体の情報を取得する物体情報取得手段と、自車情報取得手段が取得した自車情報に基づいて自車の予測進路を設定する予測進路設定手段と、物体情報取得手段が取得した物体情報と予測進路設定手段が設定した予測進路に基づいて外界認識センサが検知した物体と自車との衝突可能性を判定する第1の衝突判定手段と、物体情報取得手段が取得した物体情報に基づいて外界認識センサが検知した物体と自車との衝突可能性を判定する第2の衝突判定手段と、自車情報取得手段が取得した自車情報の異常を判定する自車情報判定手段と、自車情報判定手段が、自車情報取得手段が取得した自車情報が異常と判定した場合、第2の衝突判定手段を選択する衝突判定選択手段とを備える。
(もっと読む)
進路評価装置
【課題】予測進路をグループ化して評価することにより、適切な進路を選択できる進路評価装置を提供すること。
【解決手段】複数の予測進路を生成し(S12、S14)、予測進路について類似するものを一つの予測進路グループとして設定し、少なくとも二以上の異なる複数の評価基準によって予測進路グループごとに進路評価を行う(S16)。これにより、予測進路ごとでは複数の評価基準について所定以上の評価を得られない場合であっても、予測進路グループで評価することによって複数の評価基準について所定以上の評価を得ることができる。このため、所定以上の評価の予測進路グループを選択することにより適切な進路を選択することが可能となる。
(もっと読む)
ドライバ状態推定装置及びプログラム
【課題】ドライバが運転不適状態であるか否かを推定でき、将来の事故発生を防ぐことができるようにする。
【解決手段】レーン位置センサ12によって、レーン中心からの距離を示すレーン位置信号の時系列データを出力する。信号抽出部22によって、レーン位置信号の時系列データから、各区間の区間最大値を抽出する。分布パラメータ推定部24によって、抽出された区間最大値に基づいて、一般極値分布を表わす確率分布関数を決定するパラメータを推定する。リスク推定部26によって、推定されたパラメータによって決定される確率分布関数から、レーン中心からの距離が所定値以上となる逸脱確率を事故発生リスクとして推定し、不適運転推定部28によって、推定された逸脱確率に基づいて、ドライバが運転不適状態であるか否かを推定する。
(もっと読む)
カーナビゲーションシステム
【課題】危険な運転状態であったとき、その位置を危険箇所として登録し、運転技量の向上により危険個所でなくなった場合には、その個所を危険個所から消去することができるカーナビゲーションシステムを提供する。
【解決手段】ステアリングセンサ10やブレーキセンサ11の検出信号から危険な運転状態と判定された場合、その位置をメモリ部8に危険箇所として登録する。このとき、併せて現在位置の天気を送受信部9により情報センタから取得し、現在時刻を時計部22から取得して危険箇所と共に登録する。危険箇所として登録された位置であっても、運転技量の向上により、運転状態、その時の天気、時刻などを総合的に判断して危険運転でないと判定されたときには、メモリ部8に登録されている危険箇所から消去する。
(もっと読む)
車両用逆走防止装置
【課題】逆走の検出が容易な車両用逆走防止装置を提供すること。
【解決手段】車両周辺を撮像した撮像画像を用いて、自車両の逆走を判定し、警報を出力する車両用逆走防止装置10において、撮像画像から、車両用防護柵Dの継ぎ目構造が、順走時に対応する継ぎ目構造と同じか否か判定する継ぎ目構造判定手段31と、継ぎ目構造判定手段31により車両用防護柵Dの継ぎ目構造が順走時に対応する継ぎ目構造と異なると判定されると、自車両が逆走していると判定する第1の逆走判定手段32と、を備える。
(もっと読む)
車両用追従装置
【課題】不要に移動体が先行車として設定されることを低減し、制御精度の向上が図られた車両用追従装置を提供すること。
【解決手段】設定された先行車に追従する追従制御を行う車両用追従装置において、自車両100前方の他車両102の方向指示器が作動中であると判定された場合に、他車両102の方向指示器が作動中であると判定されなかった場合より、他車両102を先行車と設定し難くするように設定条件を変更する設定条件変更手段を備える構成とする。これにより、自車両100前方の他車両102が車線を離脱する可能性が高いにも関わらず、不要に先行車として設定されることを防止する。また、他車両102が先行車として設定されている場合には、設定された他車両102が車線を離脱する前に、先行車としての設定を解除し易くする。
(もっと読む)
移動体の衝突防止システムおよび衝突防止方法
【課題】移動体の加速時に、加速方向に存在する障害物をより早く検知する移動体の衝突防止システムを提供する。
【解決手段】移動体110に設置された複数のカメラ101により障害物130を含む画像をそれぞれ撮影する撮影手段100と、移動体のZMP150を算出する算出手段100と、画像における障害物の位置とZMPの位置とを照合する照合手段100と、を有することを特徴とする。
(もっと読む)
情報通知システム、携帯端末装置、車載装置及び情報送信方法
【課題】車載装置の演算処理負荷を低減させる。
【解決手段】歩行者が有する携帯端末装置10は、当該携帯端末装置10が存在する現在の位置を特定する現在位置情報を取得し、当該携帯端末装置10の移動速度、移動方向を検出し、検出される移動速度、移動方向から推定される当該携帯端末装置10を有する歩行者の挙動が、この歩行者の近傍を走行する車両にとって、注意を要するかどうかを判定し、注意を要すると判定されたことに応じて、取得された現在位置情報を無線通信により車載装置20に送信するよう制御することで実現する。
(もっと読む)
車両用運転支援装置
【課題】この発明は、パターンマッチング処理を利用して障害物を検出するものにおいて、車両から遠く離れた障害物を精度良く検出することができる車両用運転支援装置を提供することを目的とする。
【解決手段】車両周辺を所定タイミング毎に撮影する(S1)撮像手段と、撮影された画像を複数フレームに渡って時系列的に記憶する(S2)第1の記憶手段と、特定時点の画像中の障害物を、記憶されているパターンマッチング用データと比較することで検出する(S3)障害物検出手段と、上記障害物が検出された場合(S4)、上記特定時点から時系列的に過去に遡り、過去画像から上記障害物に対応する過去の障害物画像を抽出する(S7)過去画像マッチングデータ抽出手段と、上記過去の障害物画像を新たなパターンマッチング用データとして追加記憶する(S13、S16)第2の記憶手段とを備える。
(もっと読む)
走行支援装置
【課題】実際の道路環境に合致したより精密な走行支援を行う走行支援装置を提供する。
【解決手段】自車両2に設けられたECU10では、車両(自車両2及び周囲車両80)の形状情報や走行軌跡情報を例えば車車間通信により取得し、車両の運動を直方体の運動として捉え、その直方体の走行軌跡である三次元空間を形成し、その形成した三次元空間からなる道路地図を生成する。ECU10は、この実際に車両が移動した走行軌跡である三次元空間からなる道路地図に基づき、自車両2がその道路地図から外れた領域を走行している場合には、その旨を報知し、或いは自車両2が例えばその道路地図が表す領域(走行可能であることが保証される安全な領域)に戻りやすくなるように制御支援を行う。
(もっと読む)
運転支援装置
【課題】初めて走行する道路であってもドライバの異常運転を検出する。
【解決手段】運転支援装置は、車両が走行する道路の形状を検出する道路形状検出部22と、道路形状検出部22により検出された道路形状と、車両の過去の最大加速度と、に基づいて道路の最大曲率地点における適正速度を算出する適正速度予測部26と、車両の走行速度を検出する速度検出部24と、道路形状検出部22により検出された道路形状と、速度検出部24により検出された走行速度とに基づいて、道路の最大曲率地点における速度を予測する速度予測部27と、適正速度予測部26により算出された適正速度と、速度予測部27により予測された速度と、に基づいて、走行状態が異常であるかを判定する速度異常判定部28と、を備えている。
(もっと読む)
無線周波数近接センサ及びセンサ・システム
【課題】車両の死角における物体検知を行い、他の検知システムと干渉しない、近接センサを提供する。
【解決手段】周波数が異なる複数の無線周波数(RF)信号を送信し、反射したRF信号を受信し、中間周波数(IF)信号を送るように、構成される。各IF信号は反射RF信号の1つを代表し、各反射RF信号はセンサの検出領域内の物体によって反射された送信RF信号に対応する。センサは、IF信号を用いて、物体がその検出領域内にあるかどうか及びその移動方向を決定する。
(もっと読む)
歩車間通信システム
【課題】 携帯通信装置のバッテリ残量の不足により、危険度の通知が不能になることを防止できる歩車間通信システムを提供する。
【解決手段】 歩車間通信システムは、携帯通信装置10と、車両に搭載される車載通信装置とから構成される。携帯通信装置10は、バッテリ残量検出部12と、歩車間距離取得部13と、通信周期設定部14と、表示・警報制御部15と、通信制御部17とを備えている。表示・警報制御部15は表示・警報条件設定部16を備えている。通信周期設定部17は、バッテリ残量検出部12が取得したバッテリ残量が所定値未満の時には、バッテリ残量が第1の所定値以上の時の通信周期よりも長い通信周期を設定する。これにより、バッテリ残量が少ない時には通信の頻度を少なくすることができるので、バッテリの電力消費を抑制できる。
(もっと読む)
脇見状態判定装置
【課題】運転者が脇見をしているか否かをより正確に判定できる脇見状態判定装置を提供すること。
【解決手段】脇見状態判定装置100は、運転者の視線に関する情報と、運転操作に関する情報又は走行状態に関する情報のうちの少なくとも一つとを観測量として取得する観測量取得手段10と、脇見状態と観測量との間の確率的関係及び観測量取得手段10が取得した観測量に基づいて脇見状態を判定する脇見状態判定手段12と、を備える。また、脇見状態判定手段12は、運転者が脇見をしている確率を算出し、算出した確率が閾値を超えた場合に運転者が脇見をしていると判定する。
(もっと読む)
安全運転支援システム
【課題】ドライバの運転操作と外部環境との関連性を随時学習し、ドライバの普段の内部状態からの逸脱を認識して安全な運転を支援する。
【解決手段】車外環境認識部2で認識した走行環境のリスクと、操作特徴量量子化部3で量子化した運転操作データの特徴量との対応関係をモデル学習部4で学習し、モデルパラメータを取得する。状態推定部5は、学習済みのモデルパラメータを用いて操作特徴量と走行環境リスクレベルとの関連性からドライバの内部状態を推定する。この内部状態の推定結果は、信頼度評価部6で評価されて警報・支援部7に出力される。警報・支援部7は、ドライバの内部状態と走行環境リスクレベルとを比較し、車両が本質的に安全か危険な状態にあるかを評価して警報や操作支援等を行う。
(もっと読む)
物体検出装置
【課題】検出信号のピーク値を的確に検出して適切な物体検出が行える物体検出装置を提供すること。
【解決手段】電波を送信し物体で反射した受信波を送信波とミキシングして検出信号を出力し、その検出信号において物体に対応したピーク値を検出する際に、ピーク値の検出予測位置に所定範囲の探索領域を設定し(S10)、その探索領域においてピーク値を検出し(S12)、その探索領域にピーク値を検出できない場合に検出信号の信号値の増加する側に探索領域をシフトさせてピーク値の検出を行う(S12〜S16)。これにより、探索領域を大きくすることなく広い範囲でピーク検出が可能となり、確実なピーク検出が行え、物体の検出精度の向上が図れる。
(もっと読む)
181 - 200 / 581
[ Back to top ]