
Fターム[5H301AA10]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の可動空間、領域、経路 (2,962) | 所定の空間、領域を自由に移動可能なもの (867)
Fターム[5H301AA10]に分類される特許
181 - 200 / 867
経路生成装置と方法および経路生成装置を備える移動装置
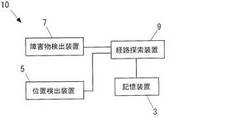
【課題】移動経路の探索において、より高速で移動可能な移動経路を見つけ出すことで、移動装置の高速移動を可能にすることにある。
【解決手段】自律移動する移動装置の移動経路を生成する経路生成装置10であって、移動開始位置から目標到達位置までの間に設定され移動経路の生成の指標となる複数の経由位置を記憶した記憶装置3と、移動装置の現在位置を検出する位置検出装置5と、移動装置の移動中において、現在位置に基づいて、複数の経由位置のうち移動装置が次に通過する経由位置に向かうための移動経路を生成する経路探索装置9とを備える。経路探索装置9は、複数の移動経路候補を生成するとともに、これら移動経路候補の各々について高速走行可能度を算出し、これら高速走行可能度を互いに比較することで、複数の移動経路候補の中から、最も高速走行可能度が高い移動経路候補を選択し、選択した移動経路候補を実際に使用する移動経路として設定する。
(もっと読む)
自動運転装置

【課題】 自車両の自動運転を行うにあたり、自車両の周囲における交通環境に応じた走行制御を行うことにより、自車両の周囲における交通環境の妨げを防止することができる自動運転装置を提供する。
【解決手段】 自動運転装置における自動制御ECU1は、走行中の道路に対して道なりに走行させる自動運転制御を行うにあたり、自車両が走行する車線の状態を検出し、検出した車線の状態に基づいて、自動運転制御を行う。たとえば、自車両が走行する道路に自車走行車線が道なり走行可能である道なり車線があるにも係わらず、自車両が道なり車線でない車線を走行している場合には、自車両を道なり車線に移動させる進路を生成する。また、自車両が走行する道路に道なり車線が複数ある場合には、道なり走行に好適となる道なり車線に自車両を移動させる進路を生成する。
(もっと読む)
移動体及びその制御方法
【課題】移動体に搭乗者が乗降する際の安定性を向上させることができる移動体及びその制御方法を提供すること。
【解決手段】本発明にかかる移動体1は、駆動輪11、補助輪12、状態センサ13、制御部14、車体15、制動装置163を備える。車体15は、駆動輪11に支持され、搭乗者が搭乗可能である。補助輪12は、断面が円形状であり、少なくとも走行停止時に接地可能に配置される。また、補助輪12は、駆動輪11に対して、搭乗者の乗降時における車体15への搭乗者の荷重による荷重位置に対応する方向に配置される。状態センサ13は、車体15の走行状態を検出する。制御部14は、走行状態に基づいて駆動輪11を制御し、車体15の倒立制御を実行する。制動装置163は、補助輪12の回転を制動する。
(もっと読む)
無人移動体の制御方法及び無人移動体
【課題】自律移動可能な半自律走行車を遠隔操縦するに際して、一旦停止させたり大幅に減速させたりすることなく、障害物の回避動作や交差点での進路変更を安全に行わせることが可能である無人移動体の制御方法及び無人移動体を提供する。
【解決手段】測距データから移動経路を作成して、移動経路上を自律して移動可能な半自律走行車Bの制御方法であって、移動中に新規操舵指令及び新規速度指令を得た時点で、これに基づく新規移動経路T上で且つ現在速度及び新規速度のうちの大きい方の移動速度に対応する制動距離内に障害物Dが有るか否かを判定し、障害物Dが有る場合には、新規移動経路Tの横に障害物回避経路Rを設定すると共に回避経路R上の障害物Dの有無を判定し、以降、障害物Dのない障害物回避経路Tが設定されるまで上記処理を繰り返し、障害物回避経路Tを設定し得ない場合には、半自律走行車Bを停止させる。
(もっと読む)
無人移動体の制御方法及び遠隔操縦装置
【課題】遠隔操舵部を有する遠隔操縦装置に、他の遠隔操縦装置から操舵主導権を移管するに際して、無人移動体を停止させずに操舵主導権を移管し得る無人移動体の制御方法及び遠隔操縦装置を提供する。
【解決手段】ジョイスティックタイプの遠隔操舵部50及び自律走行車Cの遠隔操縦用カメラ14で得た画像を映し出すディスプレー40を有する遠隔操縦装置Bに操舵主導権を移管するに際して、遠隔操縦装置Bのディスプレー40の画面に、自律走行車Cの操舵範囲SAと、自律走行車Cの実際操舵位置SPと、この実際操舵位置SPに基づいて設定される安全許容範囲SZを表示させると共に、遠隔操縦装置Bにおける遠隔操舵部50の指示スティック51の位置51Aを重ねて表示させ、遠隔操縦装置Bのディスプレー40画面における指示スティック51の位置51Aを安全許容範囲SZ内に入れた状態で、管制局Aから遠隔操縦装置Bへの操舵主導権の移管を許可する。
(もっと読む)
毛状体で移動する教材用ロボット
【課題】
ロボット教材を使用した教育においては児童の興味をそそる事が重要であり、
タイヤを使った駆動方式では、動きが単調な動きとなり、利用者の興味を引きにくいと言った問題がある。
ロボット教材のプログラミングにおいて、パーソナルコンピューターなどのプログラミング装置が必要になり、ものづくり教室などの運営に必要な設備が多くなり運営の必要経費が高くなる。
【解決手段】
複数の毛状体推進装置を使用して移動することでユーモアがある動きができる教材用自走ロボットを作成した。
本発明は手書きが可能な二次元バーコードの書式と、教材用自走ロボット自体にバーコードリーダーを搭載することで、パーソナルコンピューターなどを使用しなくても、教材用自走ロボット本体だけでプログラミングを行う事を可能とした。
(もっと読む)
無人車両の半自律走行システム
【課題】走行環境の違いや通信環境の変化に関わらずに、無人車両を適切に走行させられるようにする。
【解決手段】本発明は、走行領域内の測距データを取得するための測距部を有し、この測距部により取得した測距データに基づき自律走行可能な無人車両と、この無人車両と無線通信回線を介して接続され、その無人車両の遠隔操縦を行うための遠隔操縦装置とを有する無人車両の半自律走行システムにおいて、測距部により取得した測距データに基づき、走行領域内の走行環境を評価する走行環境評価手段10cと、走行環境の評価結果に基づいて、無人車両の走行を担う自律走行機能と遠隔操縦との混成割合を決定する混成割合決定手段50aと、決定された混成割合の自律走行機能と遠隔操縦に従って、無人車両を走行させる混成走行手段30aとを有している。
(もっと読む)
自律型移動体
【課題】移動障害物のゴーストを適時に除去することにより、効率的な移動を行うことができるようにする。
【解決手段】障害物検出手段30aと、その検出した障害物が移動障害物であるか否かを判定する移動障害物判定手段30bと、移動障害物データを含む地図を作成する地図作成手段20aと、移動障害物データが存在する地図上の座標位置をマーキングするマーキング手段30cと、所定の時間経過前に、上記マーキングした座標位置における移動障害物を検出する移動障害物検出手段30dと、所定の時間経過毎に、そのマーキングした座標位置の移動障害物データを残置し、かつ、他の座標位置の移動障害物データを消去する移動障害物消去手段20bと、マーキングに係る移動障害物データを残置した地図に基づき経路計画を作成する経路計画作成手段20cと、経路計画に従い移動領域内を移動させるための移動手段10aとを有する。
(もっと読む)
ロボットおよびロボットシステム
【課題】
本発明はロボットを複数台運用するロボットシステムに関する。
【解決手段】
第1のロボットは、物体の反射光強度を計測する計測部と、計測部により得られた計測結果を解析する演算部と、第1のロボットを移動させる駆動部と、を備える。第2のロボットは再帰性反射特性を有する複数のマーカを備え、第1のロボットの演算部は、計測部の計測結果に基づき第2のロボットの複数の前記マーカの位置を算出し、算出の結果に基づき第2のロボットの位置および姿勢を認識し、第2のロボットの位置および姿勢の認識の結果に基づき第1のロボットを移動させるためのパラメータを算出し、第1のロボットの駆動部は、パラメータに基づき第1のロボットを移動させる。
(もっと読む)
経路生成装置と方法および経路生成装置を備える移動装置
【課題】移動経路の探索において、移動装置の設定進行方向変化速度を考慮することで、移動装置が、より確実に移動経路に沿って走行できるようにする。
【解決手段】自律移動する移動装置の移動経路を生成する経路生成装置10であって、移動開始位置から目標到達位置までの間に設定され移動経路の生成の指標となる複数の経由位置を記憶した記憶装置3と、移動装置の現在位置を検出する位置検出装置5と、移動装置の移動中において、現在位置に基づいて、複数の経由位置のうち移動装置が次に通過する経由位置に向かうための移動経路を所定の経路探索条件の下で探索し生成する経路探索装置9と、を備える。経路探索条件は、移動装置の設定進行方向変化速度が、移動経路の曲率と移動装置の移動速度とにより定まる必要進行方向変化速度以上であるという進行方向変化速度条件を含む。
(もっと読む)
自律移動ロボットシステム
【課題】自律移動ロボットの操作を通じて、高い移動速度や複雑な移動経路であっても、
それらに適応させた移動を次第に行うことができるようにする。
【解決手段】
自律移動ロボットBの移動態様を指示するための指示情報を生成する指示情報生成手段
65cと、生成した指示情報を自律移動ロボットBに向けて送信するための指示情報送信
手段を遠隔操作装置Cに設ける一方、遠隔操作装置Cからの指示情報の入力頻度を算出す
る指示情報入力頻度算出手段70bと、算出した指示情報の入力頻度に基づき、自律移動
ロボットBの自律移動に関わる自律移動用パラメータを変更する自律移動用パラメータ変
更手段70cと、変更した自律移動用パラメータに基づき、駆動機構によって自律移動ロ
ボットBを移動させる自律移動手段10mとを自律移動ロボットBに設けている。
(もっと読む)
移動装置及び方法
【課題】カメラ画像から段差や障害物を認識することにより遠距離でも認識できると共に、床色や模様等に拘わらず正確に認識することが可能な移動装置及び方法を提供する。
【解決手段】AF駆動部3によりレンズ2を移動させて焦点距離を変化させながら撮像素子5で撮像を行う。また、カメラ撮像画面を複数のエリアに分割し、焦点距離を変化させながら撮像素子5で得られた画像データ及び焦点距離に基づいてエリア毎にコントラストピークを計測する。そして、エリア毎のカメラと各エリアの対象物との距離を検出し、エリア毎に得られた対象物との距離データに基づいて3次元データ化を行い、地図データを作成する。
(もっと読む)
移動ロボットの走行領域判別装置及び走行領域判別方法
【課題】移動ロボットの前方領域を走行可能領域及び走行不能領域に正しく区分けし得るうえ、隣接して存在する走行可能領域間の境界部分の段差をも検出して走行の可否を判定し得る走行領域判定装置及び方法を提供する。
【解決手段】移動ロボットRの前方側を走行可能及び走行不能の各領域に分ける処理部30では、外界計測部10のレーザレンジファインダ11を用いて取得した移動ロボットRの前方側プロファイルデータの幾何的特徴量から領域の分割を行い、分割後の領域内の計測点データから勾配や表面粗さなどの幾何的特徴量を評価して、分割した領域を走行可能領域及び走行不能領域に区分けし、加えて、区分けによる走行可能領域G1,G2が隣接している場合、走行可能領域G1,G2間の境界部分Nのデータから、段差Hなどの幾何的特徴量を評価することで、移動ロボットRの境界部分Nでの走行の可否を判定処理する。
(もっと読む)
無人搬送車、および、その走行制御方法
【課題】レーザにより位置認識をおこなう無人搬送車において、停止位置で精度よく停止することのできるようにすることができる。
【解決手段】地図データと、走行速度が設定された経路データとを保持し、レーザにより周辺環境の状況を計測して、地図データと計測されたデータとをマッチングして、現在位置を求める無人搬送車において、経路データには、無人搬送車の走行を停止させる終点、予め設定しておく。そして、無人搬送車の現在位置と操舵角により定まる目標停止線が、終点上にのるか、終点を越えたときに、前記無人搬送車を停止させるように制御する。
(もっと読む)
区域分解を用いるエリア・カバレッジ・システムおよび方法
【課題】移動ロボット・デバイスの経路計画を効率的かつ低コストで作成できるエリア・カバレッジ・システムを提供する。
【解決手段】区域分解を用いてエリア・カバレッジ経路計画を作成する方法は、複数のランドマークを有する作業現場地図上で、開始点を特定する。複数のランドマークのうち、第1ランドマークを特定する。障害物を検出するまで、第1ランドマークの周囲において経路を発生する。障害物の検出に応答して、次のランドマークまで経路を直線状にする。次のランドマーク周囲において経路を発生する。
(もっと読む)
移動ロボットの遠方環境認識装置及び方法
【課題】小型かつ安価な装置を用いて、高速走行時に検出が必要な検出必要距離内に存在する平面及びある程度小さな障害物も検出することができ、かつ走行路に対して前方の走行可能領域が傾いており、検出必要距離内に存在する障害物を検出できない場合でも、走行安全性を確保することができる移動ロボットの遠方環境認識装置及び方法を提供する。
【解決手段】移動ロボット10に走行経路の生成に必要な環境地図データ5を出力する遠方環境認識装置。移動ロボット10に固定して配置され前方の平面領域を含む相互に重複する領域の画像を撮像する一対の車載カメラ22と、移動ロボットに固定して配置され前方正面及び所定の検出必要距離に相当する下向き角度でレーザ光を前方左右に走査しその反射光から障害物の位置を検出するレーザセンサ24と、車載カメラとレーザセンサの出力から単一の座標系に定義された平面領域1及び障害物4を含む環境地図データ5を生成するコンピュータ26とを備える。
(もっと読む)
移動可能領域抽出装置、移動可能領域抽出システム、移動可能領域抽出方法、およびプログラム
【課題】自律移動ロボットの移動に障害となる障害物の位置を事前に検出し、自律移動ロボットが目的地まで移動する経路を生成するための移動可能領域を抽出する移動可能領域抽出装置、移動可能領域抽出システム、移動可能領域抽出方法、およびプログラムを提供する。
【解決手段】予め定められた床面の高さを表す床面判定値に基づいて、移動体と異なる位置で移動体の移動範囲内に設置された距離センサの情報に基づいて算出された観測点の高さの情報に基づいて、移動体が移動できる床面を示す床面観測点を判別する床面判別手段と、距離センサの情報に基づいて算出された観測点の位置の情報に基づいて、予め定められた二次元のグリッドマップに、床面観測点が含まれるか否かを示すフラグをマッピングする床面マッピング手段と、床面観測点が含まれることを示しているグリッドマップの領域に基づいて、移動可能領域を抽出する領域抽出手段と、を備える。
(もっと読む)
光学式自己位置検知装置及び方法
【課題】検知位置精度が高く、自己の姿勢も検知可能な技術であって、簡易に実現可能な技術を提供することを目的とする。
【解決手段】移動フィールド20を移動する移動体10には、エリアセンサカメラ12が搭載されている。この移動フィールド20内の適当な位置に、少なくとも2つ以上の色彩変化発光体30が固定装備されており、かつその位置関係は既知である。
色彩変化発光体30は、各発光体毎に個別の色彩変化パターンで発光している。この色彩変化パターンで、各色彩変化発光体30a、30b、が識別される。エリアセンサカメラ12が2以上の色彩変化発光体30をキャプチャすることによって、それらの画像中の位置を知ることができる。それらの位置関係から、移動体の位置・向きを算出することができる。色彩変化パターンで各色彩変化発光体30a、30bを識別するので、形状に歪みが生じたり等しても、その識別を行うことができる。
(もっと読む)
自律移動装置
【課題】障害物が存在しなくても進入を回避すべき領域を自律的に回避して移動することが可能な自律移動装置を提供する。
【解決手段】自律移動装置は、周囲の障害物情報を取得するレーザレンジファインダ13と、障害物が存在する障害物領域を示す環境地図211、及び、進入を禁止する進入禁止領域を示す進入禁止領域地図212を記憶する記憶部21と、レーザレンジファインダ13によって取得された障害物情報と環境地図211とを用いて自己位置を推定する自己位置推定部25と、推定された自己位置、環境地図211、及び進入禁止領域地図212に基づいて、障害物領域及び進入禁止領域を回避して目的地まで自律移動するように制御する移動制御部28とを備える。
(もっと読む)
方位角推定装置、方法及びプログラム
【課題】方位角計測センサを用いずに、位置計測センサの計測値のみから、方位角を推定する。
【解決手段】時刻ステップt−1において方位角Φs(t−1)の対象物が行動a(t−1)を取ったときに、時刻ステップt−1において(Zxa(t−1),Zya(t−1))に位置し、時刻ステップtにおいて(Zxa(t),Zya(t))に位置する確率P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))を用いて、Bel(Φs(t−1))=P(Zxa(t),Zya(t),Zxa(t−1),Zya(t−1)|Φs(t−1),a(t−1))・Bel0(Φs(t−1))の関係を満たす、時刻ステップt−1において対象物の方位角がΦs(t−1)である更新後確率Bel(Φs(t−1))を計測更新部18が計算する。
(もっと読む)
181 - 200 / 867
[ Back to top ]