
Fターム[5H301BB02]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 用途、移動体の種類 (1,798) | 土木用 (19)
Fターム[5H301BB02]に分類される特許
1 - 19 / 19
特徴の配置のための位置制御システム
【課題】 作業位置の間を自発的に往来することが可能な作業機械の位置を決定する作業機械に使用するシステムを提供する。
【解決手段】 本体を備える作業機械と、本体に連結されるコンピューティングシステムと、本体から延びる器具であって、作業機械が位置する作業場所の地面を変更するために構成される、器具と、本体に連結されコンピューティングシステムと通信する測位システムであって、コンピューティングシステムが作業機械の位置および作業機械の配向を決定するようにコンピューティングシステムに渡されるデータを提供する、測位システムと、コンピューティングシステムに電気的に連結されてメモリに格納されるソフトウェアと、を含む。
(もっと読む)
自走式作業機の遠隔操作装置
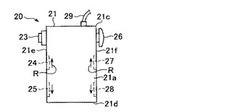
【課題】オペレータの直進操作の負担を軽減することができる自走式作業機の遠隔操作装置を提供する。
【解決手段】それぞれ独立して駆動制御される左側及び右側の走行体を有する自走式作業機の遠隔操作装置であって、遠隔操作装置20の本体21と、遠隔操作装置の本体21の左側面に設けた左前進スイッチ24と、遠隔操作装置の本体21の左側面に設けた左後進スイッチ25と、遠隔操作装置の本体21の右側面に設けた右前進スイッチ27と、遠隔操作装置の本体21の右側面に設けた右後進スイッチ28とを備える。
(もっと読む)
遠隔操作用マーキング装置

【課題】マーキング部の位置決めを的確に行う上で有利な遠隔操作用マーキング装置を提供する。
【解決手段】遠隔操作用マーキング装置200は、被マーキング位置にマーキングを行うマーキング部12と、作業車両110で支持されマーキング部12を移動させるマーキング部用移動機構14とを備える。マーキング部用移動機構14は、遠隔操作によってガイド部材20を旋回させる旋回機構18と、直線状に延在するガイドロッド2002と、マーキング部12を支持すると共に、ガイドロッド2002にその延在方向に沿って移動可能に支持された移動体22と、移動体22をガイドロッド2002に沿って移動させる移動体用移動機構24とを備えている。
(もっと読む)
無人車両の走行システムにおける走行制御方法および無人車両の走行システム
【課題】作業現場が施工された後、無人車両を走行させるまでに行なわれる作業現場の詳細な地形データを計測する工程、走行経路を生成する工程を不要とし、作業現場施工後、即座に走行経路に沿って無人車両を走行可能として、無人車両の生産性を向上させるとともに作業現場の運用コストを低減させる。
【解決手段】作業現場の地形データを作成して新たな走行経路の情報を生成する。次に、作成された地形データに基づいて新たな走行経路を含む作業現場を施工する。次に、生成された新たな走行経路の情報を車両に与え、仮の走行制御データに従い当該新たな走行経路に沿って走行させて、新たな走行経路の実際の地形データを取得する。次に、取得された新たな走行経路の実際の地形データに基づいて前記仮の走行制御データを修正する。次に、修正された走行制御データに従い無人車両を走行させる。
(もっと読む)
無人車両の走行システムおよび走行経路生成方法
【課題】経由点を最適な地点に設定する。
【解決手段】走行経路10上にあって積込点12の手前のスイッチバック点13を、積込点12の位置移動に応じて位置移動する移動地点としてその初期位置情報を指示する。指示されたスイッチバック点13の初期位置情報と、積込点12の位置情報とに基づいて、積込点12とスイッチバック点13との相対位置関係Aの情報を生成する。積込点12の位置が移動すると、当該位置移動後の積込点12´の位置情報と、当該積込点12´における無人車両20´の向きの情報と、相対位置関係Aの情報とに基づいて、当該相対位置関係Aを維持できる位置に新たなスイッチバック点13´を設定し、新たなスイッチバック点13´を経て位置移動後の積込点12に至る走行経路10´を生成する。
(もっと読む)
無人車両の走行システムおよびその走行制御方法
【課題】両側積込みで無人車両に走行指令を与えるに際して、左右の判断や左右指示ボタンによる操作を不要とし、作業性を向上させる。また、両側積込みで積込み点の位置を設定するに際して、左右の判断や左右指示ボタンによる操作を不要とし、作業性を向上させる。
【解決手段】両側積込みで無人車両に走行指令を与えるに際して、走行指令が指示されたときの作業機の向きまたは位置と、境界線の方向または位置とを対比して、積込機の作業機が左積込み点側に位置されたか、あるいは右積込み点側に位置されたかを判別する。また、両側積込みで積込み点の位置を設定するに際して、積込み点の位置設定が指示されたときの作業機の向きまたは位置と、境界線の方向または位置とを対比して、積込機の作業機が左積込み点側に位置されたか、あるいは右積込み点側に位置されたかを判別する。
(もっと読む)
自律走行装置
【課題】鉱山における土砂運搬用トラックなどの車両の自律走行技術が求められている。安全かつ高効率の土砂運搬作業実現のため、鉱山で高速走行する車両同士が安全に擦れ違えるように車両の走行を制御する必要がある。
【解決手段】通常は単独走行用の道路を車両が走行し、対面車両が来た場合は擦れ違い用の道路に走行路を切り替えるために、各車両が走行時に自車付近の路面状態を測定して得た路面情報を、運行管理を行っている運行管理センタに送信してセンタ側で集約し、地点ごとの路面状態がセンタから取得できるようにする。そして、擦れ違う自律走行トラック同士が擦れ違い用の道路に切り替える際には、センタからの路面情報を元に路面状態が悪化している地点を避けて走行レーンを切り替える。
(もっと読む)
車両の誘導装置
【課題】
走行コースの修正を作業効率よく行うようにする(ティーチングによる方法よりも作業効率よく走行コースの修正を行う)。
【解決手段】
走行位置計測手段で計測される無人車両の走行位置と、該無人車両の誘導コースを規定するコースデータとに基づいて、前記無人車両を前記誘導コースに沿って誘導走行させる無人車両の誘導装置であって、コースエリアの境界線のデータを入力する手段と、移動起点の位置とその位置における前記無人車両の方向および移動目的点の位置とその位置における車両進行方向とをそれぞれ指示する手段と、前記移動起点の位置および移動目的点において、前記指示された位置と車両進行方向が満足されるコースデータを作成する手段と、前記作成されたコースデータで規定される誘導コースで無人車両を走行させた場合の該無人車両と前記コースエリアの境界線との干渉を推認する手段と、前記干渉が推認された場合に、前記コースデータを変更するコースデータ変更手段と、を備える。
(もっと読む)
遠隔操作システムおよび遠隔操作装置
【課題】不慣れな操作者でも移動体を容易に遠隔操作できる遠隔操作システムおよび遠隔操作装置を提供する。
【解決手段】遠隔操作システム10に含まれる遠隔操作装置14のCPU44は、移動体12からの過去情報および最新の移動体情報に基づいて過去情報を選択し仮想視点Vを決定する。CPU44は、グローバル座標系GCに、選択された過去情報に基づいて3次元環境画像Kと仮想視点Vとを生成し、最新の移動体情報と移動体モデルMに関するデータとに基づいて移動体モデルMを生成し、最新の移動体情報と操舵ユニット52からの入力量とに基づいて第1補助モデルM1と第2補助モデルM2とを生成する。そして、CPU44は、3次元環境画像Kと移動体モデルMと第1補助モデルM1と第2補助モデルM2とを仮想視点Vから切り出し中心点Q方向に透視投影して合成画像を生成し、当該合成画像をモニタ36に表示する。
(もっと読む)
無人車両の走行経路生成方法
【課題】車両走行可能な最低の制約条件を満たしつつ、更に、タイヤや車体への負荷を小さく抑えたり、走行に要する所要時間を短くしたり、低燃費で走行させたりすることができる最適な走行経路を生成することによって、走行に伴うコストを最小に抑える。
【解決手段】無人車両の車幅、最小旋回半径を含む車両拘束条件を入力するとともに、無人車両が走行すべき走行経路生成範囲、回避すべき障害物、入口点および出口点の位置と方向を含む幾何学的拘束条件を入力する(ステップ201)。車両拘束条件および幾何学的拘束条件を満足し、かつ走行経路の曲率あるいはステアリング角または/および走行経路の曲率の変化率あるいは無人車両のステアリング操作量を少なくともコスト要素とするコスト関数の関数値が最小になるように、走行経路を生成する(ステップ202)。
(もっと読む)
ロボットクローラのための可変プリミティブマッピング
高レベル(オペレータ入力)プリミティブ42、64から低レベルプリミティブ46、70への可変マッピングを用いることによって、ロボットクローラ10の種々の動作モードが与えられる。そのマッピングは、ロボットクローラ10によって検知される環境データ74、94の関数であり、それにより、動作モードを環境に合わせることができるようになる。 (もっと読む)
遠隔操縦作業機の画像処理システム
【課題】無線により遠隔操縦が可能な遠隔操縦作業機において、簡素な構成で、対象地形と作業機との位置関係を容易かつ正確に把握することができるようにした、遠隔操縦作業機の画像処理システムを提供する。
【解決手段】無線信号で遠隔操縦される作業機の画像処理システムにおいて、該作業機の絶対位置を計測する第1GPS受信手段1aと、該作業機の姿勢を計測する第1姿勢計測手段2aと、該作業機とは別設され周囲の対象地形の形状を計測する地形計測装置3と、地形計測装置3の絶対位置を計測する第2GPS受信手段1bと、地形計測装置3の姿勢を計測する第2姿勢計測手段2bと、該作業機の絶対位置及び姿勢に基づいて該作業機の三次元形状を演算する作業機演算手段4と、地形計測装置3の絶対位置及び姿勢に基づいて該対象地形の三次元形状を演算する地形演算手段5と、該対象地形及び該作業機の三次元形状を重畳表示する表示手段6とを備える。
(もっと読む)
自走式掃除機
【課題】障害物の周り、部屋の隅、壁際等に掃除残しが無く掃除するように走行する自走式掃除機を提供する。
【解決手段】自走式掃除機は、第1移動範囲22aの外周の壁21に沿って点P1まで走行する。点P1に到達すると、X軸25a方向に旋回し、掃除機本体1の幅である点P2まで走行する。点P2まで走行したら、掃除機本体1をY軸25b方向に旋回し、往復走行を開始する。往復走行中、検出センサ7が障害物23を検出すると、自走式掃除機は、点P5まで走行し、掃除機本体1をX軸25a方向に旋回し、障害物23に沿って掃除機本体1の幅分走行し、掃除機本体1をY軸25b方向に旋回する。
(もっと読む)
車両の誘導装置
【課題】コースエリアの形状変更や移動目的位置の変更に対応した誘導コースを容易に作成し、かつ、無人車両がコースエリアの境界や切り羽面に干渉することを防止する。
【解決手段】走行位置計測手段で計測される無人車両の走行位置と、無人車両の誘導コースを規定するコースデータとに基づいて、無人車両を誘導コースに沿って誘導走行させる無人車両の誘導装置であって、コースエリアの形状を入力する手段と、移動起点の位置と無人車両の方向および移動目的点の位置と車両進行方向とをそれぞれ指示する手段と、移動起点および移動目的点において、指示された位置と車両進行方向が満足されるコースデータを作成する手段と、作成されたコースデータで無人車両を走行させた場合の無人車両とコースエリアの干渉を推認する手段と、干渉が推認された場合に、コースデータを変更するコースデータ変更手段と、を備える。
(もっと読む)
騒音低減装置
【課題】移動可能で遮音性能が高く、道路工事等に適した騒音低減装置を提供する。
【解決手段】騒音低減装置1は、車輪2を備えたベースフレーム3上に遮音壁4を搭載し、その一面に収音マイク5を配置し、他の面にスピーカを取付けている。ベースフレームにはアクティブ騒音制御回路及び増幅器と電源部、走行モータを内蔵している。任意の台数の騒音低減装置を連結してアスファルトフィニッシャ11の側方に配置し、アスファルトフィニッシャの進行に同期させて走行させる。アスファルトフィニッシャが生じる騒音は、収音マイクにて収音され、騒音とは逆位相の音響がスピーカから放射されて、アスファルトフィニッシャの側方へ伝播する騒音が低減される。
(もっと読む)
自走式の作業機械及び自走式の作業機械の遠隔操縦システム
【課題】一つのGPSの移動で車体の向きに係る情報を取得する場合に同情報の中から正確な情報を選別して取得できる自走式の作業機械を提供する。
【解決手段】遠隔操作器25で遠隔操縦されGPSアンテナ14及びGPSレシーバ15を有するGPSを車体1に設置し、GPSでのGPSアンテナ14の位置の検出結果を工事事務所20側へ逐次送信しながら移動する自走式の作業機械において、GPSアンテナ14を第1の位置から第2の位置へ水平移動させる水平移動装置17と、走行停止を検出する走行状態検出手段と、走行状態検出手段での検出結果に基づいて走行停止が判別されたときに水平移動装置17でGPSアンテナ14を第1の位置から第2の位置へ移動させる制御用コントローラ12とを設け、走行停止が判別されたときにGPSアンテナ14の第1の位置及び第2の位置に係る各水平位置のデータを取得するように構成した。
(もっと読む)
スタンプ式マーキング装置
【課題】遠隔操作される無人の建設機械により土砂掘削線等のマーキングポイントにマーキングを行う場合に、従来のようなノズル詰まり等が無くマーキングを常に確実に行え、また建設機械の移動によるマーキング装置の振れを短時間に確実に抑止できるスタンプ式マーキング装置を提供する。
【解決手段】昇降ロッドの下端に、マーキング材を染み込ませたスポンジ等のスタンプ部を設けたスタンプ式マーキング装置2をバックホウ等の建設機械のアーム先端に設けられた支持部8にXYテーブル25と鉛直を保持するジンバル機構を介して取付け、電動シリンダ等のZ軸シリンダにより昇降ロッドを下降させ、スタンプ部を地面等に押し付けてマーキングを行う。ジンバル機構の回転軸には振れ止めダンパーを接続し、制動により直交2方向の振れを抑制する。
(もっと読む)
移動作業機の自動化構造
【課題】 高い処理能力を要することなく、高い精度で高速化に対応できる移動作業機の自動化構造を提供する。
【解決手段】 移動作業機1の位置を検出する位置検出手段3と、移動作業機1の作動を制御する制御手段49とを備え、移動作業機1の作業領域A0に複数の制御領域A1〜A8を設定するとともに、各制御領域A1〜A8に対応する複数の制御プログラムを備え、制御手段49が、位置検出手段4の検出に基づいて移動作業機1の各制御領域A1〜A8への到達を検知するのに伴って、到達した制御領域A1〜A8に対応する制御プログラムを実行して移動作業機1の作動を制御するように構成した。
(もっと読む)
作業車両に於けるポジション制御装置
【課題】 車体のエンジン始動時に作業機昇降用のアクチュエータの駆動を禁止する牽制装置を設けた作業車両に於いて、牽制装置の作動を解除するタイミングを改善して確実な牽制解除を実行する。
【解決手段】 ポジションセンサの計測値とリフトアーム角センサの計測値が一致する設定点(A)を中心として、その上方に所定範囲の上部制限領域(+B)を設けるとともに、その下方に上部制限領域と同一幅の下部制限領域(−B)を設けておく。牽制装置が作動しているときに、リフトアーム角センサの計測値が設定点(A)にあり、ポジションセンサの計測値(C1)が上部制限領域(+B)の外にある場合、または下部制限領域(−B)の外にある場合は、この制限領域の外から一方の制限領域を通り抜けて他方の制限領域に入ったときに、牽制装置の作動を解除する。
(もっと読む)
1 - 19 / 19
[ Back to top ]