
Fターム[5H301FF02]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の位置認識用固定設備 (875) | 移動経路に沿って配置されるもの (205) | 磁気又は電磁誘導を利用するもの (97)
Fターム[5H301FF02]の下位に属するFターム
Fターム[5H301FF02]に分類される特許
1 - 20 / 30
操舵制御装置
【課題】搬送車両に多数の車軸が設けられている場合でも、その搬送車両を走行経路に沿って円滑に走行させることができる操舵制御装置を提供すること。
【解決手段】本実施形態では、各走行装置5a〜5lの車軸6aに対して操舵角θ1〜θ12を設定する場合に、操舵角設定テーブル72cから、各操舵角θ1〜θ12を取得している。よって、計算式により各操舵角θ1〜θ12を算出する場合よりも、演算量を少なくできるので、CPU71の演算時間も短くできる。従って、本実施形態のように、走行装置5a〜5lの数が多い場合でも、CPU71に掛かる負担が大きくならず、演算時間も長くならない。故に、各操舵角θ1〜θ12の設定を短い周期で実行することができ、走行経路R上に沿って無人搬送車両1を円滑に走行させることができる。
(もっと読む)
搬送車システム

【課題】左右の車輪を独立して駆動可能な搬送車において、曲線部走行時にモータの過負荷を防止する。
【解決手段】搬送車システムにおいて、速度パターン発生部62は、搬送車が曲線部を走行するときに2個の走行車輪に対して基準速度に対して内外輪にそれぞれ速度差が生じるように、速度指令を発生して2個のモータ26,29に与える。速度パターン発生部62は、搬送車が加速中に曲線部に進入することを光電センサ47が検出すれば、第1速度比率変化区間において、外輪となる走行車輪に対応するモータに対して進入時の加速度a01以下の加速度となるような速度指令を生成して与え、内輪となる走行車輪に対応するモータに対して外輪となる走行車輪の速度より速度差分以上を減らした速度となるような速度指令を生成して与える。
(もっと読む)
無人搬送車の走行制御装置、および無人搬送車
【課題】屈曲部を過ぎた後の姿勢修正を早期に終了させることができる無人搬送車の走行制御装置、および無人搬送車を提供する。
【解決手段】本発明に係る走行制御装置2Aは、走行経路に沿って敷設された走行ガイドの位置を検知しながら走行する無人搬送車1Aの走行制御装置であって、走行ガイドとの相対位置に応じたセンサ出力信号をそれぞれ出力する前部ガイドセンサ3aおよび後部ガイドセンサ3bと、現在位置を特定する位置特定手段4a、4b、10と、位置に対応した前部ガイドセンサ用の目標センサ出力値と後部ガイドセンサ用の目標センサ出力値とが予め格納された記憶部11と、記憶部11を参照して現在位置に対応する目標センサ出力値を取得し、各ガイドセンサ3a、3bから出力されたセンサ出力信号の値と目標センサ出力値との差が極小となるように操舵方向を変化させる操舵制御部12とを備えている。
(もっと読む)
磁気マーカ検出装置
【課題】磁気マーカの誤検出の低減と、どの角度から進入しても磁気マーカを検出可能な磁気マーカ及び磁気センサからなる磁気マーカ検出装置を提供する。
【解決手段】路面に埋設した路面垂直方向の磁極の異なる2列の磁気マーカと、少なくとも3つ以上の磁気検出素子を多角形に配置した磁気センサと、前記磁気センサの検出結果に基づき前記2列の磁気マーカを検出したか判断する磁気マーカ検出手段とを備え、前記磁気センサで少なくとも2つの磁気検出素子が磁極の異なる磁気を検出した場合に前記磁気マーカ検出手段が前記2列の磁気マーカを検出したと判断する。
(もっと読む)
移動体システム
【課題】 移動体の位置を連続的に監視しながら、移動体を駆動するリニアモータの1次側を連続的に制御する。
【構成】 リニアモータの2次側部材を備えた複数の移動体と、移動体の移動経路に沿って2次側部材の長さ以下のピッチで複数設けられたリニアモータの1次側部材とを設ける。移動体の位置を検出するセンサを2次側部材の長さ以下のピッチで設けると共に、センサからの位置信号により1次側部材を制御するコントローラを設ける。
(もっと読む)
移動機械の位置決め制御方法及び装置
【課題】比較的安価に且つ安定性良く、移動機械の位置決めを高精度に行うことができる位置決め制御方法及び装置を提供する。
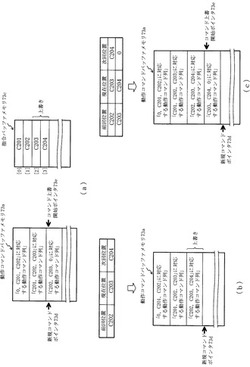
【解決手段】本発明に係る位置決め制御方法は、絶対位置情報が書き込まれ、移動機械10の設定され得る複数の目標停止位置の数と同数のICタグ3を、移動機械の移動方向に沿って、各目標停止位置に対応する減速開始点と最終制動点との間にそれぞれ設置し、ICタグに書き込まれた絶対位置情報を読み取るためのICタグリーダ4を移動機械に設置し、移動機械の現在位置が、設定された目標停止位置に対応する減速開始点を通過してから最終制動点に達する前に、ICタグリーダでICタグに書き込まれた絶対位置情報を読み取り、該読み取った絶対位置情報に基づき移動機械の現在位置を補正し、該補正後の移動機械の現在位置が最終制動点に達すると、移動機械を制動して停止させる。
(もっと読む)
無人車両
【課題】走行位置及び方位のズレを低減させた無人車両の位置方位測定システムを提供すること。
【解決手段】自らの位置と方位を位置方位演算装置21によって算出しながら走行制御装置28を介して車輪装置を駆動し、指定された走行ルートに沿って無人車両10の走行させるものであって、車体の前後それぞれに搭載された情報受信装置25は、走行ルート上の情報発信素子15を検出した検出時に位置方位演算装置21へ検出信号TPを送信し、位置方位演算装置21は、検出信号TPを受信した時に算出した位置と方位の位置方位データを記憶し、位置方位補正装置27から得られる検出時の検出値に基づく位置方位補正データとを比較して、無人車両10の位置及び方位を補正するようにした無人車両の位置方位測定システム。
(もっと読む)
搬送装置
【課題】例えば半導体装置製造用の各種基板等が収容された容器などの被搬送物を、カーブを含む軌道上で搬送する搬送装置において、カーブにある障害物との衝突を回避する。
【解決手段】搬送装置(20)は、カーブ用速度で走行すべきカーブした第1軌道区間、及び第1軌道区間に隣接し且つ第1軌道区間の上流側にあると共にカーブ用速度で走行すべき第2軌道区間を有する軌道に沿って、被搬送物を搬送する。搬送装置は、被搬送物が積載される積載部を有すると共に軌道上を走行する搬送手段(3)と、搬送手段が第2軌道区間に進入したか否かを判定する判定手段(6,10)と、第2軌道区間に進入したと判定された場合に、カーブ用速度で走行するように搬送手段を制御する走行制御手段(10)とを備える。
(もっと読む)
自走式機器およびそのプログラム
【課題】機器本体と障害物との相対位置を確保して自動的に走行する自走式機器を提供すること。
【解決手段】機器本体100周辺の障害物108を検知するセンサ部103と、障害物108に設置された無線タグ107から送信された無線タグ情報を読み取る無線タグ読取部105と、センサ部103及び無線タグ読取部105からの出力信号に基づいて移動手段102を駆動し機器本体100の移動を制御するコントロール部101と、無線タグ107へ情報を書き込む無線タグ書込部106とを備え、コントロール部101は、無線タグ017からの無線信号を受信した時、障害物108までの離間距離情報および機器本体の位置情報を、無線タグ書込部106を介して無線タグ107に書き込むように制御する。
(もっと読む)
無人搬送車の横行姿勢制御装置及び横行姿勢制御方法
【課題】装置を複雑化することなく、また製造コストを安価に抑えることができる無人搬送車の横行姿勢制御装置及び横行姿勢制御方法を提供する。
【解決手段】車両の前側に設けられた駆動ユニットと後側に設けられた駆動ユニットとが異なる軌道を移動する横行モードを有する無人搬送車の横行姿勢制御装置であって、車両が正しい姿勢であるときは前側の駆動ユニットと後側の駆動ユニットとが同時に通過するように軌道に設けられたチェックポイントを、前側の駆動ユニットと後側の駆動ユニットとが通過する時間差に基づいて車両の横行状態を推定する横行状態推定手段(S2)を有する。
(もっと読む)
無人搬送車の走行モード切替制御装置及び切替制御方法
【課題】製造コストを安価に抑えることができる無人搬送車の走行モード切替制御装置を提供する。
【解決手段】駆動ユニット11に設けられた軌道検出センサ11bで、床面に敷設された軌道20を検出しながら走行する無人搬送車1の走行モード切替制御装置であって、走行モードの切り替え指令があったら駆動ユニット11の方向転換を開始するユニット方向転換手段と、軌道検出センサ11bが軌道不検出状態から軌道検出状態になったら駆動ユニット11の方向転換完了を判定する方向転換完了判定手段と、方向転換完了を判定したら駆動ユニットの方向転換を停止して切り替え後のモードで走行する走行制御手段と、を有する。
(もっと読む)
無人搬送車の横行姿勢補正装置及び横行姿勢補正方法
【課題】製造コストを安価に抑えることができる無人搬送車の横行姿勢補正装置を提供する。
【解決手段】車両の前側に設けられた駆動ユニットと後側に設けられた駆動ユニットとが異なる軌道を移動する横行モードを有する無人搬送車の横行姿勢補正装置であって、横行モード時に前側の駆動ユニットと後側の駆動ユニットが独立して停止位置で停止指令の有無を判定する停止判定手段(ステップS10,S20)と、停止指令を受けて、対応する前側の駆動ユニット又は後側の駆動ユニットが停止するユニット停止手段(ステップS11,S21)と、前側の駆動ユニット及び後側の駆動ユニットのうちで車両の移動方向に対して先行する駆動ユニットが停止指令を受けて停止後、後行する駆動ユニットが停止指令を受けて停止するまで、先行する駆動ユニットの停止状態を維持する停止維持手段(ステップS11,S21)と、を有する。
(もっと読む)
移動体システム
【課題】リニアモータのリニアスケールからの座標を用いて、移動体間の干渉を防止する。
【解決手段】走行ルートに沿ってリニアモータの1次側コイルを配列すると共に、移動体にリニアモータの2次側を設ける。走行ルートを複数のゾーンに分割して、各ゾーンのゾーンコントローラによりゾーン内のコイルを制御する。コイルのリニアスケールを基準とする移動体の座標を、走行ルートを基準とする座標に変換し、移動体の速度と先行の移動体との距離を求める。求めた距離と先行の移動体の速度とから、先行の移動体との干渉防止速度を求めて、コイルを制御する。
【効果】先行の移動体との間隔を不必要に大きくする必要が無く、システムの効率が改善する。
(もっと読む)
搬送システム、及び搬送システムの制御方法
【課題】搬送システムにおいて、簡単な構成で、確実に搬送車同士が衝突してしまうことを防止する。
【解決手段】搬送システムは、合流箇所を有する軌道(100)と、軌道を夫々走行する複数の搬送車(210、220)と、搬送車の走行方向を基準として、軌道のうち少なくとも合流箇所の手前にある二つの軌道部分の各々の左側の縁に設けられた左部及び右側の縁に設けられた右部を有し、二つの軌道部分の一方における左部及び他方における右部間並びに一方における右部及び他方における左部間で、信号を伝達可能な伝達手段(310、320)とを備える。搬送車は、信号を右部及び左部の一方を介して送信する送信手段(410、420)、並びに信号を右部及び左部の他方を介して受信する第1受信手段(510、520)及び信号を右部及び左部の一方を介して受信する第2受信手段(610、620)を備える。
(もっと読む)
車両状態量推定装置及びその装置を用いた車両操舵制御装置
【課題】本発明は、車両の運動状態を表す状態量の推定精度を向上させる車両状態量推定装置の提供を目的とする。
【解決手段】車両の運動状態を表す所定状態量を観測するGPS受信機11等のセンサと、それらのセンサによって観測された所定状態量を車両の運動状態のモデルに入力して前記所定状態量を含む車両の運動状態を表す状態量を推定するカルマンフィルタ200とを有する、車両状態量推定装置であって、前記推定された状態量を各センサのモデルに入力して各センサによって観測可能な所定状態量が推定され、前記所定状態量のカルマンフィルタ200での反映度合いが前記推定された所定状態量と実際に観測された所定状態量との偏差に基づいて設定されることを特徴とする、車両状態量推定装置。
(もっと読む)
位置検出システム
【課題】現在位置に至るまでの位置情報の有無や進行方向に制限されることなく、簡易なセンサを用いて現在位置を正確に検出することができる位置検出システムを提供する。
【解決手段】フォークリフト1の磁気センサ5〜8の個数に対応した線形最大周期列の2値の数列を2次元平面に配置した所定のパターンで床面上に24個の磁性体Mが配列された磁性エリア13が形成されている。荷Wが荷置き位置S1の直上に位置するようにフォークリフト1の機台2を荷置き位置S1の手前に停止させて荷置き位置S1に荷Wを載置すると、機台2の底部に配置されている4つの磁気センサ5〜8でそれぞれ検知された床面の磁性エリア13の磁性体Mの極性が読み取られ、これらの極性の組み合わせに対応するセンサ配列パターンの位置が読み出される。これにより、フォークリフト1の機台2の位置並びに荷Wを載置した位置が把握される。
(もっと読む)
自走式装置及び自走式掃除機
【課題】1台で、ペット等の対象物の状態をユーザに確実に知らせることができる自走式装置及び自走式掃除機を提供する。
【解決手段】自走式掃除機1のおいて、所定の対象物に取り付けたICタグから識別情報等を読み取るICタグ読取部131と、ICタグ読取部131により読み取られた識別情報等を含む監視情報を、ユーザ所有の携帯電話機に送信する通信部134と、を備えるよう構成した。
(もっと読む)
搬送装置
【課題】 段ボール製造工場の原紙の供給やシート搬送に、フォークリフトを使用しないので安全で作業環境をよくする。 また、シート搬送では電動トラバーサやコンベアを使用しないでスペースの有効利用を図り、シンプルで低コストかつトラブルの主原因になりメンテナンスも大変な多数のセンサを使用しないシステムを提供する。
【解決手段】 ICタグ1を通路2に埋め込み、バッテリ駆動の搬送台車4に設けたタグリーダ3でデータを読み込み位置を把握し、高速走行、加減速や停止の制御を行い、原紙や積載シートの搬送を行う。
(もっと読む)
顧客移動経路情報収集装置
【課題】 簡易な構成で顧客の移動経路を正確に検出する顧客移動経路情報収集装置を提供する。
【解決手段】 ショッピングカートに取付けた床面を撮像する撮像手段7及び角速度を検出する角速度検出手段9と、撮像した床面画像から走行方向及び走行速度を検出する走行状態検出手段、ショッピングカート移動開始時に初期情報を設定する初期情報設定手段及び撮像した画像情報から床面に設けた絶対位置及び方位を表す位置マーカを検出する位置マーカ検出手段10と、角速度と走行方向及び走行速度と位置マーカの絶対位置及び方位とを収集して記憶する経路情報記憶手段11と、位置マーカの絶対位置及び方位から少なくとも角速度を補正する角速度補正手段と、前記初期情報と走行方向及び走行速度と補正された角速度とから移動位置及び方位を演算する移動位置演算手段と、移動位置及び方位を蓄積して移動経路情報を形成する移動経路情報形成手段とを備えている。
(もっと読む)
顧客移動経路情報収集装置
【課題】 簡易な構成で自動的にメンテナンスを行うことができる顧客移動経路情報収集装置を提供する。
【解決手段】 顧客が使用するショッピングカート3に取付けた走行状態を検出する走行状態検出手段と、前記ショッピングカートのカート置場4に配設されて当該ショッピングカートの移動開始時に初期位置及び方向を設定する初期情報設定手段17と、前記走行状態検出手段で検出した走行状態に基づいて移動経路情報を形成する移動経路情報形成手段と、前記カート置場に配設されて移動経路情報形成手段のメンテナンスを行う自動メンテナンス手段16,18とを備えている。
(もっと読む)
1 - 20 / 30
[ Back to top ]