
Fターム[5H301FF15]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の位置認識用固定設備 (875) | 制御情報を含む位置情報認識のためのもの (127)
Fターム[5H301FF15]の下位に属するFターム
停止位置情報を含むもの (46)
速度制御情報(加減速点等)を含むもの (13)
方向転換情報を含むもの (26)
Fターム[5H301FF15]に分類される特許
1 - 20 / 42
自動搬送システム
【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
自動走行車および自動走行システム

【課題】走行位置検出におけるノイズの影響を受けにくく、トラブル発生時の再発車等も容易な自動走行車を用いた自動走行システムを提供する。
【解決手段】自動走行車1は、走路上の走行が可能な車台部10と、走路上に設けられた誘導線21を検出する誘導線センサ2と、誘導線センサにより検出された誘導線に沿って車台部を走行させるとともに、誘導線に設けられた制御情報24,25を読み取る情報読み取り部を備えたコントローラ4と、走路上に誘導線とは別に設けられた色ガイド31,32の色を検出する色センサとを有する。コントローラは、色センサにより検出された色ガイドの色と情報読み取り部により読み取った制御情報とに応じて車台部の制御を行う。
(もっと読む)
モータ駆動装置
【課題】ガイドレールで規定される軌道上を走行する、複数の車輪を備えた走行台車において、従来は車載コントローラから直接個々の駆動車輪の制御を行っているが、この方式では駆動軸数が増えるほどコントローラの処理能力が必要となる。
【解決手段】モータ駆動装置の制御演算部101は、コントローラ部102とドライバ部103を備えている。コントローラ部102は、車載コントローラ401から出力された台車位置指令104を入力として、指令分周逓倍比105で車輪位置指令106に変換され、これとモータ位置119を入力とする位置制御器107で車輪速度指令108を生成する。これに速度指令出力ゲイン109を乗じた結果が、速度指令出力110としてコントローラ部102から出力される。
(もっと読む)
無人搬送車の走行制御装置、および無人搬送車
【課題】屈曲部を過ぎた後の姿勢修正を早期に終了させることができる無人搬送車の走行制御装置、および無人搬送車を提供する。
【解決手段】本発明に係る走行制御装置2Aは、走行経路に沿って敷設された走行ガイドの位置を検知しながら走行する無人搬送車1Aの走行制御装置であって、走行ガイドとの相対位置に応じたセンサ出力信号をそれぞれ出力する前部ガイドセンサ3aおよび後部ガイドセンサ3bと、現在位置を特定する位置特定手段4a、4b、10と、位置に対応した前部ガイドセンサ用の目標センサ出力値と後部ガイドセンサ用の目標センサ出力値とが予め格納された記憶部11と、記憶部11を参照して現在位置に対応する目標センサ出力値を取得し、各ガイドセンサ3a、3bから出力されたセンサ出力信号の値と目標センサ出力値との差が極小となるように操舵方向を変化させる操舵制御部12とを備えている。
(もっと読む)
無人搬送車の走行制御装置、および無人搬送車
【課題】走行ガイド、ステーション等の位置ずれを修正しなくても、安定して走行・荷役を行うことができる無人搬送車の走行制御装置、および無人搬送車を提供する。
【解決手段】本発明に係る走行制御装置2は、複数の区間に区分けされた走行経路に沿って敷設された走行ガイドの位置を検知しながら走行する無人搬送車の走行制御装置であって、走行ガイドとの相対位置に応じたセンサ出力信号を出力するガイドセンサ3a、3bと、現在走行中の区間である現区間を特定する区間特定手段4a、4b、10と、区間毎の目標センサ出力値が予め格納された記憶部11と、記憶部11を参照して現区間に応じた目標センサ出力値を取得し、ガイドセンサ3a、3bから出力されるセンサ出力信号の値と目標センサ出力値との差が極小となるように操舵方向を変化させる操舵制御部12とを備えている。
(もっと読む)
ルート決定システムおよび移動装置
【課題】予め定められた複数のラインによって構成されるルートに沿って移動する移動装置において、所望の移動ルートを決定できるルート決定システムを提供する。
【解決手段】ルート決定システムは、複数のラインによって構成されるルートに沿って移動する移動装置に設けられる。ルート決定システムは、複数のラインを記憶しておき、カメラで標識を撮影し(S11)、その内容を認識し(S12)、ライン情報と、認識した標識とから、複数のラインによって構成されるルートを移動可能なルートの決定を行なう(S13)。
(もっと読む)
地図作成方法とロボットの移動経路決定方法
【課題】地図情報の作成及び教示を極めて簡単かつ直観的な操作により実現する。
【解決手段】ユーザは複数のランドマーク装置を任意の位置に配置する。設置が完了すると、各ランドマーク装置が周囲のランドマーク装置の番号とその方位を調査して隣接装置情報を生成し、さらにランドマーク装置同士が隣接装置情報を交換することによって自動的に地図情報が生成される。その後、ロボットに対しゴール地点のランドマーク装置の番号を指示すると、ロボットは最寄りのランドマーク装置からゴール地点までの経路を計算し、ランドマーク装置を順に辿ることでゴール地点に到達する。
(もっと読む)
方向傾き検出装置、および搬送システム
【課題】床面に貼付したテープを検出して進行方向を制御する従来の自動搬送車では、テープを検出できなくなる場合があった。
【解決手段】異なる高さに配置された第1の光センサ30、第2の光センサ31、32、第3の光センサ33を含み、搬送車の側面に取付けられる光センサユニット12を有する光センサ部と、第1の光センサの光が照射される、等間隔で配置された複数の直線状の第1の溝21と、第2の光センサの光が照射される、少なくともいずれかの第1の溝を延伸した位置に配置された直線状の第2の溝22、23と、第3の光センサの光が照射される反射面24とを有し、搬送路に沿って所定の間隔をおいて複数個配置される立体マーカ20とを備える。第2の溝は搬送路における前記立体マーカの位置を表しており、光センサ部は、搬送路における搬送車の位置を検出する位置検出部と、反射面に対する搬送車の傾きを検出する傾き検出部とを有する。
(もっと読む)
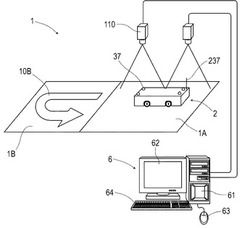
自動走行ルートガイドツールおよび自動走行装置
【課題】簡単に設置が可能で、かつ、安価な走行ガイドツールと、該ガイドツールを基に方向転換しながら予め決められたルートを自動走行可能な自動走行装置を提供する。
【解決手段】識別情報が記憶されたRFIDチップを内蔵した走行ルートガイドツールであって、前記走行ガイドツールの視認可能な面に走行をガイドすべき自動走行装置が方向転換する時に基準となる位置と方向を示す印が表示されているように構成した。自動走行装置は、RFIDリーダと、カメラと、カメラ画像分析部と、識別情報に対応づけられた方向情報と、画像分析の結果得られた方向情報を基に転換方向を確定する制御部と、方向転換操舵機構とを有するように構成した。
(もっと読む)
無線タグシートおよび移動台車システム
【課題】 自律走行する無人搬送車の経路を絶対位置情報やマップデータを使用せずに補正できるようにする。
【解決手段】 目標点までの距離と方向の情報を記憶した複数の無線タグを並べた無線タグ群12を、前記目標点と前記無線タグ郡の中央とが指示経路上になるように指示経路に対して対称となるように法線方向に予め走行面に施設し、無人搬送車が前記無線タグ群12を通過する際に前記無線タグ群12の無線タグから記憶されている情報を読み取り、計算装置で前記情報に基づいて走行経路を補正しながら駆動装置に指令する。
(もっと読む)
自律走行車の走行システム
【課題】自律走行車の作動制御が容易に設定及び変更できる自律走行車の走行システムを提供することにある。
【解決手段】自律走行車10が走行する床面2と対向する天井部3に走行経路Lと対応して自律走行車10の作動制御の種別に対応する着色テープ21〜25を布設し、自律走行車10に着色テープ21〜25を撮像する撮像部18及び撮像部18によって撮像された着色テープ21〜25の画像データに基づいて撮像された着色テープ21〜25の色識別により判定した着色テープ21〜25に対応して自律走行車を作動制御する制御部20を備える。適宜着色テープ21〜25を天井部3に布設或いは取り外す簡単な作業により自律走行車の作動制御を設定或いは変更することができる。
(もっと読む)
無人搬送車の経路の補正システム
【課題】 自律走行する無人搬送車の経路を絶対位置情報やマップデータを使用せずに補正できるようにする。
【解決手段】 基準となる基準無線タグ23と前記基準無線タグ23からの相対的な位置情報を記憶した複数の無線タグとを、前記基準無線タグ23を中心として直線状に無線タグ間を等間隔に並べた無線タグ群12を前記基準無線タグ23が指示経路11上になるように前記指示経路11に対して法線方向に予め走行面に施設し、無人搬送車1が前記無線タグ群12を通過する際に前記無線タグ群12の無線タグから記憶されている情報を読み取り、計算装置6で前記情報に基づいて前記指示経路からのずれ量を計算して、前記ずれ量に基づいて走行装置4に指令する。
(もっと読む)
無人搬送車
【課題】路面に敷設された誘導線に沿って前後走行及び横行走行をする無人搬送車において、横行走行用の誘導線を1本にする。
【解決手段】無人搬送車10は、車体11の前後部に配設された換向自在な駆動輪12、13と、路面に敷設された誘導線31を検知する誘導線センサ14と、誘導線センサ14の出力に基づいて駆動輪12、13を制御する制御部16とを備え、制御部16により誘導線31に沿ってステアリングが制御されて前後走行及び前後方向に直交する横行走行をする。制御部16は、前後走行時には、駆動輪12、13を独立ステアリング方式で制御し、横行走行時には、駆動輪12、13を互いに横行用の平行な向きに保持すると共に、2輪速度差ステアリング方式で制御する。これにより、横行走行用の誘導線31を1本にでき、敷設の手間とコストが減る。
(もっと読む)
自律旋回装置
【課題】操舵輪が接地する床等に影響されることなく適切に操舵できる自律旋回装置を提
供する。
【解決手段】自律旋回装置2は、車両が旋回を開始する始点を検知する位置検知手段6と
、車両の走行した距離を検出する距離検出手段8と、操舵輪36を操舵する操舵装置10
と、操舵輪36が操舵される操舵角を検出する角度検出手段12と、車両の走行する距離
の累積値を車両が旋回するときの操舵輪36の目標操舵角に対応させた旋回データを記録
した記憶手段14と、操舵装置10の動作を制御する制御装置16とを備える。制御装置
16は、車両の始点から走行した距離が旋回データの累積値に達した時点で、操舵輪36
の操舵角が旋回データの目標操舵角に合致するように、操舵装置10を動作させる。
(もっと読む)
搬送システム及び搬送車
【課題】例えば半導体装置製造用の各種基板等が収容された容器等の被搬送物を、合流箇所を含む軌道上で搬送する搬送システムにおいて、搬送車同士の衝突を防止しつつ、搬送車を効率良く稼働する。
【解決手段】搬送システム(100)は、軌道(1)と、複数の搬送車(3)と、軌道上における合流箇所を含む所定範囲内へ、複数の搬送車のうち一の搬送車が軌道の一部を介して進入した場合に、所定範囲内へ、複数の搬送車のうち他の搬送車が軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段(7,9)とを備える。進入制御手段は、進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、一の搬送車の停止位置を基準として他の搬送車が一の搬送車に衝突するか否かを判定し、他の搬送車が衝突しないと判定されると、進入禁止信号を解除する。
(もっと読む)
自律移動体制御システム、自律移動体制御方法、自律移動体制御プログラム、および記録媒体
【課題】目標物の位置まで自律移動体を移動させる際に必要なスペースの省スペース化とともに、移動時間の短縮を図ることができる自律移動体制御システム、自律移動体制御方法、自律移動体制御プログラム、および記録媒体を提供する。
【解決手段】レーザレンジセンサ110は、所定角度範囲内に光を照射し、照射した光の反射光から警備ロボット周辺に存在する充電装置200を含む物体の位置を示す複数の位置情報を検出し、レーザレンジセンサにより検出された複数の位置情報から、レーザレンジセンサにより照射された光の反射光の反射率が所定反射率よりも低い領域を特定し、当該領域の距離とNDフィルタ210の長さとが略同一であることを条件に、当該領域をNDフィルタと特定し、特定されたNDフィルタに基づいて、警備ロボットを充電装置200まで移動させる。
(もっと読む)
搬送システム
【課題】例えば半導体装置製造用の各種基板等が収容された容器などの被搬送物を、搬送する搬送システムにおいて、バーコードラベル等の識別マークを利用して制御を実行する際の実行位置や実行内容についての自由度を高める。
【解決手段】搬送システム(100)は、軌道(1)と、軌道に相互に間隔をおいて夫々付けられた複数の識別マークと、軌道に沿って走行して被搬送物を搬送すると共に、複数の識別マークのうち通過した識別マークを読み取る読取手段を有する搬送手段(3)と、軌道に沿った複数の識別マーク間に予め仮想的に夫々付けられた複数の仮想マークのうち、搬送手段が通過した仮想マークを、読み取られた識別マークに基づいて、特定する仮想マーク特定手段(10)と、特定された仮想マークに基づいて、搬送手段を制御する搬送制御手段(10)とを備える。
(もっと読む)
走行ロボット
【課題】監視巡回する走行ロボットにおいて、カーブを支障なく通り抜けるとともに、不審者でない小動物を不審者と誤認することがない走行ロボットを提供する。
【解決手段】巡回ルートのカーブにさしかかると、走行ロボットはカーブ入り口標識を検出し、レーダを起動させ進行方向の左右にレーダ波を送出する。このレーダ波の反射によって左右の通り抜け可否を判断し、進行方向を変える。また焦電センサで小動物らしき熱源を検出したら、走行ロボットは搭載しているレーダとカメラを起動しこの情報を無線で警務者に送出する。警務者は小動物であると判断したら走行ロボットにレーダの停止と警報をオフする命令を送出する。
(もっと読む)
走行機器、無線タグ装置及びそのプログラム
【課題】走行機器と連携する装置が非接触で誘導や回避などの動作を、少ない電力消費でも安定に動作する走行機器及び無線タグ装置を提供すること。
【解決手段】この本体周辺の無線タグの情報を読み取る無線タグ読取手段を備えた走行機器と、この本体と連携する無線タグ装置であって前記無線タグ読取手段と通信可能な無線タグと、前記無線タグのアンテナから受信した電力から制御する装置からなり、前記走行機器が前記無線タグ装置に接近したときに、無線タグのアンテナから受信した電力によって、前記無線タグ読取手段へ応答すると共に、無線タグに備えている装置を動作させることで、走行機器が無線タグ装置に接近したときのみ無線タグ装置に備え付けてある装置を動作させる。
(もっと読む)
移動体システム
【課題】リニアモータのリニアスケールからの座標を用いて、移動体間の干渉を防止する。
【解決手段】走行ルートに沿ってリニアモータの1次側コイルを配列すると共に、移動体にリニアモータの2次側を設ける。走行ルートを複数のゾーンに分割して、各ゾーンのゾーンコントローラによりゾーン内のコイルを制御する。コイルのリニアスケールを基準とする移動体の座標を、走行ルートを基準とする座標に変換し、移動体の速度と先行の移動体との距離を求める。求めた距離と先行の移動体の速度とから、先行の移動体との干渉防止速度を求めて、コイルを制御する。
【効果】先行の移動体との間隔を不必要に大きくする必要が無く、システムの効率が改善する。
(もっと読む)
1 - 20 / 42
[ Back to top ]