
Fターム[5H301GG03]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 位置認識用固定設備検出用撮像手段 (117)
Fターム[5H301GG03]に分類される特許
21 - 40 / 117
移動体位置検出システムおよび方法
【課題】撮像した画像が照合用のデータベースにない場合でも位置検出を円滑に継続できる移動体位置検出システムおよび方法を提供する。
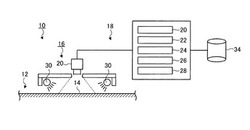
【解決手段】平面12上を移動する移動体16の位置を検出する移動体位置検出システム10であって、平面12上に配置された複数のドットからなるドットパターン14と、移動体16に備えられ、移動体16が位置する平面12上の領域を撮像する撮像手段20と、撮像手段20が時間的に連続して取得した2画像中に共通して含まれるドットパターンの位置関係に基づいて、2画像間の位置および方向関係を求め、移動体16の現在位置および方向を推定する推定手段28と、を備えるようにする。
(もっと読む)
ステレオカメラによる平面検出方法とこの方法を用いた移動ロボット

【課題】Hパラメータ推定の安定性を高めることができ、舗装路、砂利道、泥地、砂地、草原等の様々な帯域の模様をもつ平面領域を検出でき、撮影位置の変化による平面検出上の抜けを防ぐことができ、これにより、平面検出の安定性を高めることができるステレオカメラによる平面検出方法とこの方法を用いた移動ロボットを提供する。
【解決手段】異なる標準偏差を有する複数のLOGフィルタを設定し、最大の標準偏差を有するLOGフィルタを用いて画像情報取得ステップと射影変換行列算出ステップを実行し、最大の標準偏差による射影変換行列を動的に推定し(S101〜S104)、次いで、推定した射影変換行列を初期値として、順次小さい標準偏差を有するLOGフィルタを用いて画像情報取得ステップと射影変換行列算出ステップを実行して順次小さい標準偏差による射影変換行列を動的に推定し、これを最小の標準偏差を有するLOGフィルタまで繰り返して最終の射影変換行列を動的に推定する(S111〜S112)。
(もっと読む)
ランドマーク識別のための自動標識付け
【課題】画像においてランドマークを識別する方法を提供する。
【解決手段】作業現場の画像を受け取り、この画像において示唆された作業現場の特徴の識別を判定するために画像を分析する。作業現場の特徴の示唆された識別を、通信ユニットを通じて送る。確認された識別を形成するために、作業現場の特徴の示唆された識別を受け取る。確認された識別、およびこの確認された識別と関連のある複数の属性を、データベースに格納する。
(もっと読む)
無人走行システム
【課題】簡易な構成で、低コストで、かつメンテナンスが容易な無人走行システムを提供すること。
【解決手段】無人走行車1と複数のターゲット2とカメラ3と画像認識処理装置とを備えた無人走行システム。第1のターゲットがカメラの視野に入った状態で無人走行車の走行を開始する。第nのターゲットがカメラの視野中の左右目標範囲に入るように、無人走行車が自身の向きを変えながら、第nのターゲットの視野中における大きさが所定の大きさとなるまで走行する。次いで、第nのターゲットの視野中における大きさが所定の大きさとなったときに視野中にある第n+1のターゲットが左右目標範囲に入るように、無人走行車が自身の向きを変えながら、第n+1のターゲットの視野中における大きさが所定の大きさとなるまで走行する。これにより、無人走行車が所望の軌道に沿って走行する。
(もっと読む)
自律移動体、自己位置推定装置、およびプログラム
【課題】自律移動体が自己位置を推定する際に移動障害物の影響を受け難くするとともに、平らな壁面以外の障害物の計測情報も自己位置推定に利用できる自律移動体およびその自己位置推定方法を提供する。
【解決手段】自律移動体100は、移動環境計測用の視覚センサ2と、視覚センサ2による計測結果を用いて移動環境内に存在する障害物の3次元の位置データ群を含む環境データを生成する3次元環境データ生成部4と、環境データを用いて、移動環境内に存在する平らな壁面を検出する壁面検出部6と、環境データに含まれる位置データ群のうち第1の高さ範囲に属する位置データによって特定される障害物の位置情報及び壁面の位置情報を、移動環境内に固定的に存在する固定障害物の位置を示す参照マップと照合することで、自己の位置を推定する自己位置推定部8と、を備える。
(もっと読む)
2次元図形マッチング方法
【課題】逐次性を有する高速な2次元図形マッチング方法を提供することを目的とする。
【解決手段】入力地図および参照地図に新たな点を挿入し(S102,S108)、入力地図および参照地図の局所特徴を抽出し(S104,S110)、抽出された参照地図の局所特徴を記憶し(S112)、抽出された入力地図内の局所特徴の一つをクエリとし、類似する参照地図内の局所特徴を検索し(S114)、検索結果から解候補としての仮説を含む仮説集合を生成し(S116)、仮説集合に含まれる各仮説の確からしさを評価する(S118)。この際、参照地図の局所特徴のLSH関数によるハッシュ値に対応するビンに記憶し(S112)、クエリに関する局所特徴のLSH関数によるハッシュ値に対応するビンを検索し(S114)、点と仮説との対である点仮説ペアを評価する順序を計画し(S118a)、最良の仮説を選出する(S118b)。
(もっと読む)
遠隔操縦システム
【課題】移動体と遠隔操縦装置を備えた遠隔操縦システムにおいて、移動体の遠隔操縦性を高める。
【解決手段】オンボードカメラ14を搭載した無人車両Bと、画像を表示する表示部33、及び遠隔操縦するための操作部36を備えた遠隔操縦装置Cを有する遠隔操縦システムにおいて、遠隔操縦装置Cが、受信処理手段31aとデータ処理手段31cとの間に、受信処理手段31aからのデータを蓄積し且つデータ処理手段31cへ出力するデータを所定時間遅延させるFIFOバッファメモリ31bを備えた構成としたことにより、無人車両Bからのデータの受信遅れ時間に変化が生じた場合でも、表示部33の画像が急激に変化するような事態を防いで、無人車両Bの遠隔操縦性の向上を実現した。
(もっと読む)
移動経路計画装置、移動体制御装置及び移動体
【課題】移動体の経路計画効率の向上を図ることが可能な移動経路計画装置を提供する。
【解決手段】移動体の進行方向を撮影する撮影手段と、前記撮影手段から得られる撮影画像を基に所定の画像処理を行うことにより、前記撮影画像に存在する通行痕跡を検出する画像処理手段と、前記画像処理手段によって検出された通行痕跡を基に前記移動体の移動経路を計画する経路計画手段とを備える。
(もっと読む)
誘導装置および誘導装置の制御方法
【課題】使用者の足底反力、関節角度の運動を直接計測し、誘導装置の制御に適用することで使用者の運動を妨げることなく、目的地まで安全に誘導できる誘導装置および誘導装置の制御方法を提供する。
【解決手段】回転車輪1を有する台車部2と、回転車輪1を駆動する駆動部12と、台車部2に取付けられたポール3と、使用者13の力操作を検出する力操作検出手段8と、障害物を検出する障害物検出手段6と、台車部2の位置を検出する位置検出手段7と、駆動部を制御する制御部11と、台車部2と使用者13との距離を計測する距離計測手段5と、使用者13がポール3の先端のグリップ部4を把持する力を計測する把持力計測手段9と、目的地を入力する目的地入力手段10と、を備えた誘導装置14において、使用者13の足底に足底反力を計測する足底反力計測手段15を備え、使用者13の股関節および膝関節に関節角度を計測する関節角度計測手段16を備える。
(もっと読む)
移動体及び移動体の制御方法並びに移動体システム
【課題】教示作業にかかる労力を低減するとともに移動体を走行経路に沿って精度良く走行させることができるようにした、移動体及び移動体の制御方法並びに移動体システムを提供する。
【解決手段】予め走行経路に沿って配設されたガイドライン104を検出するガイドラインセンサ4と、車体2の進行方向を撮像するカメラ4と、車体2の駆動装置3と、駆動装置3を制御する制御装置5とを有し、制御装置5を、ガイドラインセンサ104に基づいて駆動装置3を制御する教示走行を実行する教示走行制御部7と、教示走行実行時に、複数の教示地点のそれぞれにおいてカメラ4を動作させて教示画像を取得する教示画像取得部6と、教示画像を記憶する画像記憶部9と、
教示画像と取得画像との比較結果に基づいて駆動装置を制御する再生走行制御部8とを有して構成する。
(もっと読む)
走行輪独立操舵の無人車両及びその走行制御方法
【課題】目標経路及び目標方向に対してオフセットと姿勢ずれが同時に発生した場合に、スムーズですばやく安定して経路修正する。
【解決手段】
複数の走行輪が独立して操舵可能とする無人車両において、走行制御手段は、オフセット量Lとずれ角φとが同時に生じた際に、オフセット量Lをなくす方向に操舵角θを設定し、無人車両の中心1aから操舵角θに直交するずれ角φの反対側に旋回中心Mを設定し、旋回中心Mから各走行輪の中心までを結ぶ直線rに直交するように各走行輪3,4,5,6の方向を設定する。
(もっと読む)
移動体位置検出システム
【課題】平面上に描いたパターンを利用して移動体の位置の検出を行う。
【解決手段】本発明の移動体位置検出システムは、表面に同一のドットパターンが配置された複数のパネルを並設することにより構成される平面と、複数のパネルのドットパターンを構成する個々のドットの基準特徴量を算出し、この基準特徴量を個々のドットの平面上における座標値と対応付けてデータベースに格納する基準特徴量格納手段と、移動体が位置する平面上の領域を予め決められた時間間隔で撮像する撮像手段と、撮像手段が取得した画像中の複数のドットから所定のドットを選択し、選択したドットの検出特徴量を算出する検出特徴量算出手段と、検出特徴量をデータベース中の所定の大きさの照合範囲の基準特徴量と照合することにより、最も一致度の高い基準特徴量を選択し、選択した基準特徴量の座標値を、平面上における移動体の現在位置として検出する特徴量照合手段とを備える。
(もっと読む)
3次元モデルを用いた自己位置認識手法及び自己位置認識システム
【課題】移動空間内のレイアウトを変更しても容易に適用でき、導入コストが小さく、さらに、高速且つ正確に自己位置認識する。
【解決手段】移動空間の3次元モデルを作成する手段21と、所定時間における移動体の位置及び方向からカメラ画像を取得する手段10と、所定時間における目標軌道上の目標位置及び方向を算出する手段17と、3次元モデルから目標位置及び方向の所定範囲内における複数の位置及び方向のモデル画像を形成する手段15と、この複数のモデル画像とカメラ画像との色情報の一致度を算出する手段16と、この各一致度に基づいて、移動体の位置及び方向を認識する手段18とを備えた。
(もっと読む)
移動装置および、その位置認識方法
【課題】従来技術では、カメラと投光する平面との相対位置関係から傾きや距離を算出しているため、平面とカメラの絶対位置が変化すると平面の絶対的な傾きを算出することができない課題がある。
【解決手段】本発明は、移動装置が活動する領域の天井に設けられた認識用マークをカメラで撮像した画像から認識し、前記領域内の前期移動装置の位置を認識する自己位置認識方法において、前記移動装置が、重力方向に垂直な面を保つ屈折板を透過した天井に投光したパターンの形状と位置をカメラの撮像した画像から認識し、重力方向に対する移動装置の傾斜角を判断することにより、移動装置とマークの正確な相対位置認識を行うことを特徴とする移動装置の自己位置認識方法、および、自己位置認識移動装置を提供することを目的とする。
(もっと読む)
移動体、移動体システム、及びその故障診断方法
【課題】確実に発信機の故障を検出することができる移動体、移動体システム、及び故障診断方法を提供すること。
【解決手段】本発明の一態様にかかる移動体は、環境中に設けられた発信機161から発信された信号に基づいて移動する移動体であって、発信機161から発信された識別情報を含む信号を受信する受信機126と、位置を推定する自己位置推定部111と、地図上での発信機161の位置情報を参照して、推定位置が発信機161からの識別情報を取得可能な取得可能領域にあるか否かを判定する判定部112と、推定位置が取得可能領域にある場合に、受信機126が識別情報を取得できたか否かに応じてカウント動作を行う故障カウンタ113と、故障カウンタ113のカウント値に基づいて発信機161の故障を診断する診断部114と、を備えるものである。
(もっと読む)
自律移動ロボット及び地図更新方法
【課題】誤認識を含む精度の低い地図によって環境地図が更新されることを防止する。
【解決手段】移動空間内を移動する自律移動ロボット1は、更新箇所判定部18、画像表示部20、採否指示入力部22及び地図更新部23を備える。更新箇所判定部18は、新環境地図131と旧環境地図130とを比較して更新箇所を判定する。画像表示部20は、更新箇所に対応する移動空間内の地点が撮影された撮影画像を表示する。採否指示入力部22は、オペレータによる前記更新箇所の採否指示を入力する。地図更新部23は、オペレータの採否指示に従って更新箇所が採用又は棄却された更新後の環境地図を生成する。
(もっと読む)
配膳車
【課題】保温庫を備えた自走式の配膳車において、配膳車に異常が発生した場合に、サービスセンター又はサービスマンの通信端末装置に異常発生及び配膳車の現在位置を通報し、サービスマンが現場に到着するまでに要する時間を短くする。
【解決手段】保温庫3の保温状態又は移動装置2による走行状態に異常が生じたことを検出する異常検出装置4と、あらかじめ登録されているサービスセンター及び/又はサービスマンの通信端末装置10との間で双方向通信が可能であり、異常検出装置4により異常が発生したと判断されたときに、異常が発生したこと及び現在位置情報を通信端末装置10に送信するとともに、通信端末装置10から送信された信号を受信する無線通信装置5と、無線通信装置5が受信した信号に応じて、保温庫3又は移動装置2を制御する異常状態回復装置6を備える。
(もっと読む)
充電制御装置、充電制御システム及びそれらに用いる充電制御方法並びにそのプログラム
【課題】 自律型駆動装置がバッテリ切れで動作不能となることを事前に防ぎ、充電ステーションでの充電作業をスムーズに行うことが可能な充電制御装置を提供する。
【解決手段】 充電制御装置(1)は、自律型駆動装置のバッテリ状況及び消費電力を管理する管理手段(充電管理部111)と、自律型駆動装置におけるバッテリ切れを起こす時期を事前予測する予測手段(バッテリ切れ時間予測部112)と、管理手段で管理する情報及び予測手段の予測結果を基に充電ステーションにおける自律型駆動装置のバッテリへの充電のスケジュールを作成する作成手段(充電スケジューリング部114)と、作成手段で作成されたスケジュールを自律型駆動装置及び充電ステーションに通知する手段(ロボット通信部13及び充電ステーション通信部14)とを有する。
(もっと読む)
車両の位置を決定する方法および装置、コンピュータプログラムおよびコンピュータプログラム製品
【課題】本発明は、経路に沿って移動する車両の位置を決定するための装置および方法に関連する。
【解決手段】この経路に沿ってマーカ、特にコードキャリアまたはバーコードが配置されている。この方法は、車両に搭載されたデジタルカメラによってマーカが検出され、デジタルカメラの検出範囲またはカバー範囲内にある少なくとも一つのマーカ像の位置の画像処理から、一つの所定のマーカまたは複数の所定のマーカに対する、経路に沿った車両の主移動方向および主移動方向に対して直角をなす少なくとも一つの方向における車両の相対位置が決定されることを特徴とする。本発明はまた、コンピュータプログラムおよびコンピュータプログラム製品に関する。
(もっと読む)
移動体の誘導システム
【課題】安価な構成で処理負荷が少なく経路変更が容易で、なおかつ移動体を正確に前記経路に沿って誘導制御できる移動体の誘導システムを提供する。
【解決手段】環境中に敷設した電子タグに対し、該電子タグの敷設地点周辺で実行すべき環境情報処理に必要な処理パラメターを対応付けて保持する。環境情報処理部にて前記処理パラメターを取得し、各々の環境に応じた環境情報処理を適宜選択して実行する。環境情報処理結果を利用して誘導制御部で移動体を誘導制御する。
(もっと読む)
21 - 40 / 117
[ Back to top ]