
Fターム[5H301GG05]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 走行基準物、障害物、作業対象の検出手段 (1,655)
Fターム[5H301GG05]の下位に属するFターム
接触式検出手段であるもの (105)
非接触式検出手段であるもの (1,408)
Fターム[5H301GG05]に分類される特許
121 - 140 / 142
自律機械
自律機械(10)を作業区域の自由表面の実質的に全てを横切るように、作業区域の方々に自律機械をナビゲートするための制御システムを提供する。制御システムは、機械(10)に作業区域の境界を追従させ、複数の移動を実施させるよう構成されており、各移動は、機械(10)が作業区域の境界から境界に対してある角度で外側へ移動して、境界へ再び戻ることを含む。機械(10)は各移動の間に作業区域の境界に沿って移動し、かつ機械(10)が実質的に作業区域の全境界を追従しながらこれらの移動を繰り返す。 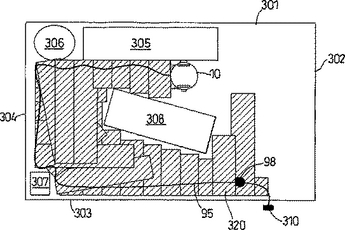 (もっと読む)
(もっと読む)
自律機械
自律真空掃除機(10)などの電気機械は、ケーブル(95)によって電力を供給される。この機械の本体に対するケーブルの向きを検出するための手段が、電位差計(76)に接続された振子(74)などの旋回可能部材の形態で備えられている。電位差計は、振子の自由端の位置に比例する出力信号を提供する。こうして、機械はケーブルの位置を検出することができ、したがって、ケーブルを避けるかまたはこれをたどることができる。ケーブルの極端な位置を検出するためにマイクロスイッチを備えることもできる。  (もっと読む)
(もっと読む)
自走掃除ロボット

【課題】 段差検出センサにより段差を検出すると、この段差を利用して、その時点でのロボット本体の姿勢(走行方向)を修正する。
【解決手段】 掃除中に段差検出手段によって段差を検出(S2でYesと判断)すると一旦停止し(S3)、次にロボット本体を左方向に回転し(S4)、段差検出手段が段差の境界部分を検出(S5でYesと判断)するまで回転して停止する(S6)。次に、その位置から、今度はロボット本体を右方向に回転し(S7)、この回転開始と同時に角度検出手段によってその回転角度の計測を開始する(S8)。そして、段差検出手段が段差の境界部分を再び検出(S9でYesと判断)するまで右方向に回転して、停止する(S10)。次に、このときの検出角度の半分の角度だけ左方向に回転して停止する(S11)。これにより、走行方向が、段差の境界部分に対して直交方向となるように姿勢が修正される。
(もっと読む)
物品運搬システム

【課題】 ロボットが人から物品を受け取る際に、人に違和感を与えることなく受取動作を行うことが可能な物品運搬システムを提供する。
【解決手段】 物品を把持する開閉可能な把持部と、把持部に作用する外力を検出する外力検出手段と、把持部の開度を検出する開度検出手段と、自律移動手段と、を備えたロボットと、物品受取/受渡作業におけるロボットの行動を決定する受取/受渡行動決定手段240と、を備え、把持部により物品の受取/受渡を行う物品運搬システムであって、受取/受渡行動決定手段240は、把持部が物品を把持していない状態で外力検出手段が第一の所定値以上の外力を検出した場合に、把持部に受取動作を開始させる受取開始判定手段243と、受取動作中において、外力検出手段が検出した外力と、開度検出手段が検出した開度と、の少なくとも一方に基づいて、物品の受取動作完了を判定する受取動作完了判定手段244と、を備えている。
(もっと読む)
自走式移動車
【課題】 本体に設けられた撮像センサが検出した画像に基づいて本体の移動が制御される自走式移動車において、撮像センサが占めるスペースの省スペース化を図ることで、自走式移動車の一層の小型化を実現することができる自走式移動車を提供する。
【解決手段】 撮像センサ9は、床面Fを撮像可能な撮像部10を含むセンサ本体9aを自走車としての掃除機本体内に配置しており、導光ケーブル13が床面Fからの光を撮像部10に導いている。掃除機の下部に延びる導光ケーブル13は、占有スペースが小さく、掃除機の小型化に寄与する。導光ケーブル13は、発光部からの光を導いて床面Fに照射する照射用導光ケーブルを、撮像用導光ケーブルと互いに同軸に、好ましくは撮像用導光ケーブルの周囲に配置することで、内包された同軸導光ケーブルとすることができる。センサ本体9aには、撮像部10が撮像した画像データを処理し変位量を算出する信号処理部設けることができる。
(もっと読む)
搬送車、制御装置及び搬送車の制御方法
【課題】搬送車同士の追突を防ぎつつ、搬送路上の搬送効率を向上させる搬送車を提供する。
【解決手段】搬送路に沿って走行する搬送車10は、他の搬送車へ運転状態情報を送信する送信部12と、他の搬送車から送信される運転状態情報を受信する受信部11と、受信部11によって受信された運転状態情報のうち、自車の直前を走行する搬送車の運転状態情報を少なくとも保持する情報保持部16と、自車の直前を走行する搬送車の運転状態情報に基づいて、自車の速度を決定し、当該速度に制御する速度決定・制御部13とを備える。
(もっと読む)
自走式移動体の制御方法
【課題】 自走式移動体が自ら作業時間を判断して行動を抑制し、作業する時間帯により、走行や作業に伴って発生する騒音を低減させることができる自走式移動体の制御方法を提供する。
【解決手段】 電源スイッチをON(S1)の後、制御部2に予め与えられた時間帯に関する情報の呼出し(S3)の後、時間帯制御が必要かどうかの判断を行う(S4)。時間帯制御が必要な場合、駆動装置3の駆動速度量と作業装置4の作業速度量の制御を行う(S5,S6)。作業開始してから一定時間tが経過した後、現在時刻の確認(S10)と時間帯入力確認(S11)の後、作業中に予定時間数の超過に起因して時間帯制御が必要か否かを判定し(S12)、時間帯制御が必要な場合、駆動速度量の制御(S13)と作業速度量の制御(S14)を行う。終了時刻が到来か否かを判定し(S17)し、到来時にはフローを終了し、到来していなければ、S9に戻って上記のフローを繰り返す。
(もっと読む)
移動制御装置および移動制御方法
【課題】 駆動対象の場所によらず、精度よく位置および角度を制御可能な移動制御装置を提供する。
【解決手段】 本発明に係る移動制御装置は、滑り係数記憶部11と、滑り係数に基づいて目標地点までの目標値を演算する目標値演算部12と、滑り係数を同定する同定部13と、温度・湿度計14と、目標地点までの目標値と実際の到達位置とのずれを検出する位置補正計算部15と、位置補正計算部15の計算結果に基づいて補正目標値を生成する補正目標値演算部16と、補正目標値に基づいてアクチュエータ5の目標駆動量を生成する駆動制御部17と、サーボ制御部18と、デッドレコグニング計算部19と、現在地を同定可能な環境認識センサ20と、環境認識センサ20の出力に基づいて現在地を検出する現在地検出部21と、を有する。メッシュごとに設定される滑り係数を、目標値と実際の到達位置とのずれを考慮に入れて同定し、同定された滑り係数を用いて移動ロボットの位置および角度を制御するため、位置および角度の制御を高精度に行える。
(もっと読む)
移動機器
【課題】不特定多数の人が存在する空間において、機敏に動作可能であり、搬送対象物を容易に積載可能であり、かつ自律性を高めて安全に移動する。
【解決手段】移動台車の両側部に駆動車輪を設け、移動機器の揺動角を検知するジャイロセンサーからの信号により駆動車輪の回転制御を行うことにより移動機器の移動面に対する2次元的な移動および移動機器のピッチング方向の揺動角を制御し、かつ移動台車の上部に設けた門型フレームと、該門型フレームと移動台車との間に設けた搬送対象物を積載するの積載部と、該門型フレームの上部に外部環境を検知するための超音波センサーとを設置する構成により、移動台車の寸法を小さくでき移動時の操舵性を向上させ、積載部のスペースを大きく確保でき搬送対象物の積載が容易になり、移動機器の最上部にセンサーを配置することで人物の検出の死角を少なくでき自律性を高められる。
(もっと読む)
車両駐車装置及び車両駐車方法
【課題】簡素な装置構成によって駐車目標位置に車両を駐車させる。
【解決手段】制御部8が、車両の駐車目標位置と、車両の駐車目標位置から運転者の降車位置までの間の車両の走行軌跡とをそれぞれ駐車位置記憶部3及び走行軌跡記憶部4に記憶し、リモートコントローラ9から制御信号を受信した際、記憶されている走行軌跡に沿って車両を駐車目標位置に移動させる。これにより、複雑な演算処理を行う必要性が無くなり、演算負荷を低減させることができるので、簡素な装置構成によって駐車目標位置に車両を駐車させることができる。
(もっと読む)
ロボット制御装置
【課題】 通常時のロボットの移動に影響を与えることなく、必要時にのみロボットの移動経路を変更し、ロボット同士の衝突を避けることが可能なロボット制御装置を提供する。
【解決手段】 ロボット制御装置3は、地図データを取得する地図取得手段380と、ロボットの現在位置データを取得する現在位置取得手段320と、サブゴールデータを取得するサブゴール取得手段350と、サブゴールデータに基づいて、2台のロボットが衝突する可能性があるか否かを判定する衝突可能性判定手段360と、衝突可能性がある2台のロボットのうち、少なくとも1台のロボットの移動経路を、地図データ、現在位置データ及びサブゴールデータに基づいて、衝突可能性がある他のロボットとの衝突を避けるように変更させる移動経路変更命令信号を生成する移動経路変更命令手段390と、移動経路変更命令信号を対応するロボットに送信する入出力手段100と、を備えている。
(もっと読む)
ピッチ変調による車両制御
下地表面上の特定方向への運動に対する車両の前後安定化のための方法。車両は、少なくとも1つの前輪と少なくとも1つの後輪とを有し、前輪は車両の運動の瞬間的な方向に垂直である力により特徴付けられる。モーター作動器は、各々の後輪を駆動し、コントローラは、一律の制御規則に従い、該前輪が該下地表面と接触していても、そうでなくても、該車両を動的に安定化させるように、1つ以上のモーター作動器を支配する。トルクは、車両ピッチまたは運動方向に垂直な前輪にかかる力を基礎として、後輪に適用される。さらに、周期的な回転変調は、後輪に適用され得、車両ピッチまたは前輪にかかる垂直な力のどちらかについて検出された応答に基づいて安定しているトルクが提供される。左右のモーター作動器は、別個に左後輪および右後輪を制御し得、前輪がグランドに接触していても、そうでなくても、ユーザーの操縦により支配される通りにターンを続ける。 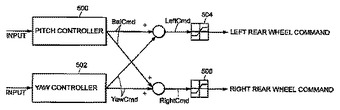 (もっと読む)
(もっと読む)
画像形成装置自走システム
【課題】 地図情報や二次元座標のマップ情報の更新,変更を行なうことなく、またLANに依存することなく、導入やレイアウト変更への対応が可能であるようにした、画像形成装置自走システムを提供する。
【解決手段】 画像形成装置100と、上記画像形成装置の移動範囲内の各所に設けられ、それぞれ固有の識別情報211と隣接するアクセスポイントの識別情報211を記憶するアクセスポイントA〜I(210)と、各移動先に備えられ、その最寄りのアクセスポイントの識別情報211を記憶する識別部400と、この識別部から移動先の最寄りのアクセスポイントの識別情報を受信する通信手段120と、上記画像形成装置と一体的に構成され、上記通信手段で受信した識別情報に基づいて、移動先の最寄りのアクセスポイントまで画像形成装置を移動させる移動手段130と、により画像形成装置自走システム10を構成する。
(もっと読む)
移動体の姿勢保持・転倒防止装置
【課題】少なくとも1方向について移動する移動体が、路面の凹凸にかかわらず転倒防止効果が得られ、かつ転倒の危険がないときには移動の障害とならない姿勢保持・転倒防止装置を提供する。
【解決手段】 少なくとも1方向について移動する移動体101の水平面に対する傾きと傾きの方向を検出する傾き角を検出する傾斜角センサ105と、移動体101から路面に張り出して移動体101を支持する支持部材107と、支持部材107を駆動する直動アクチュエータ106と、傾斜角センサ105で得られた傾き角を基準値と比較して直動アクチュエータ106の動作を決定する判定装置から構成し、移動体101が傾斜したときに速やかにこれを検出して、支持部材107を延ばして転倒防止をする。
(もっと読む)
複数の分散エレメントによる自動探索システム及び方法
地理的探索タスク及び他の探索タスクを行うエージェントチームの分散型協調制御のためのシステム及び方法。このアプローチは挙動ベースであり、探索問題に確率粒子アプローチを用いる。エージェントは、地理的エリア又はデータ空間における関心物体の存在に関する仮説を表す仮想の確率粒子の形態の確率分布に引き寄せられる。定期的な更新メッセージの合間に他のチームメンバ及び関心物体の移動をモデル化することによって信頼性の高い高帯域幅通信に対する依存が低減される。  (もっと読む)
(もっと読む)
自走式掃除機
【課題】移動方向の検出を適正に行い、これにより、走行制御をより適正に行って掃除の効率化を図る。
【解決手段】 自律走行して掃除を行う自走式掃除機100であって、当該自走式掃除機の走行パターンを記憶する記憶部5と、記憶された走行パターンに基づいて、当該自走式掃除機を移動させる走行部2と、走行部による移動中に、第一フローセンサ27から出力された第一流速信号及び第二フローセンサ28から出力された前記第二流速信号のうちの少なくとも何れか一方に基づいて、当該自走式掃除機の移動方向を検出する移動方向検出手段(例えば、CPU7)と、検出された移動方向に基づいて、当該自走式掃除機を走行パターンに従って移動させるように走行部の駆動を制御する駆動制御手段(例えば、CPU7)とを備える。
(もっと読む)
無人搬送車運行制御システム
【課題】 無人搬送車用の走行経路として走行長の異なる複数の分岐経路が設定される生産ラインにおいて、全ての無人搬送車間でのバッテリの消費電力量の平均化及び各無人搬送車の待機時間の短縮化を図り、各無人搬送車が走行すべき分岐経路を選択し得る運行制御システムを提供する。
【解決手段】 運行制御システムにおいて、各無人搬送車が分岐経路手前の分岐地点に到着した時点で、各無人搬送車の消費電力量と、それ以外の無人搬送車の消費電力量とが比較され、分岐地点に到着した無人搬送車の消費電力量の、他の無人搬送車の消費電力量に対する大小関係が求められる。分岐地点に到着した無人搬送車の消費電力量が他の無人搬送車の消費電力量に対して小さいと判断された場合、走行長の長い分岐経路が選択され、他方、分岐地点に到着した無人搬送車の消費電力量が他の無人搬送車の消費電力量に対して大きいと判断された場合には、走行長の短い分岐経路が選択される。
(もっと読む)
自走式掃除機およびそのプログラム
【課題】コーナー部の清掃を重点的に行なうことが可能な自走式掃除機を提供することを目的とする。
【解決手段】特定のアルゴリズムに基づき指定領域を自律走行し、清掃を行なう機器本体1と、機器本体1の移動方向角度を検出するジャイロセンサ9と、ジャイロセンサ9で検知した移動方向角度から壁面形状を判断し、指定領域におけるコーナー部を走行したことを自動検出する壁面角検出部12とを備え、コーナー部を走行した場合、コーナー部手前まで壁面に沿って後退走行し、再度コーナー部を前進走行させてコーナー部の清掃を行なうものである。これによって、壁面付近を自動清掃する場合に、コーナー部を走行したかどうかの判断が可能となり、コーナー部を走行した場合には、コーナー部に適した重点的な清掃が可能である。
(もっと読む)
移動作業機の位置検出装置
【課題】 多種の作業に対応できる移動作業機の位置検出装置を提供する。
【解決手段】 移動作業機1の作業領域A0の全域を外部から撮影する撮影手段64と、この撮影手段64からの画像に画像処理を施す画像処理手段66とを備えて、作業領域A0における移動作業機1の絶対位置を計測するように構成した。
(もっと読む)
無人搬送車による部品供給システム
【課題】
無人搬送車自身で無駄な走行停止を無くし、自動発進を行う動作制御が可能になり、渋滞や物品運搬の遅延による欠品を防ぐとともに、部品供給システムを構築する上での導入や変更に対して複雑な情報を定義すること無く、簡単な設定で対応できる。
【解決手段】
無人搬送車による部品供給システムにおいて、無人搬送車1が停止した時に行う作業内容を認識する作業内容認識手段6の情報により、無人搬送車1が積載している物品の種類および個数を判断し、前記無人搬送車の走行を制御装置で制御する。制御装置は、前記物品の重量を測定する重量測定手段7と、前記作業内容認識手段6および前記重量測定手段7の情報に基づいて物品の種類を識別する前記物品識別手段8と、前記作業内容認識手段6と前記重量測定手段7と物品識別手段8との情報に基づいて無人搬送車1の走行を判断する走行制御手段9とを備えている。
(もっと読む)
121 - 140 / 142
[ Back to top ]