
Fターム[5H301GG16]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の方位検出手段 (413)
Fターム[5H301GG16]の下位に属するFターム
ジャイロ (272)
Fターム[5H301GG16]に分類される特許
101 - 120 / 141
位置検出システム

【課題】移動体が発光手段の略真下方向の領域に移動した場合でも、移動体の位置を精度よく検出することが可能な信頼性にすぐれた位置検出システムを提供する。
【解決手段】移動体2が光学ビーコン♯2の略真下方向の領域に移動した場合、移動体2における2次元光学センサ32の受光面には、光学ビーコン♯2から発せられた光ではなく、光学ビーコン♯2以外の光学ビーコンから発せられた光が集光する。このときの2次元光学センサ32の受光面における集光点Dは、受光面の中心点Oに近い位置でなく、受光面の中心点Oからある程度離れた位置に生じる。
(もっと読む)
無人車両の誘導走行制御装置

【課題】 排土場における整地作業を作業効率よく車両コストの増加を招くことなく行うことができ、しかも走行コースの生成を短時間かつ低コストに簡易に行えるようにする。
【解決手段】 排土場21のサーベイライン20の各計測位置データに基づいて、サーベイライン20に対する垂線Lcが求められ、この垂線Lcに基づいて、サーベイライン20に対して排土場21の内向きに所定距離だけ離れた位置が、目標排土点26′となり、目標排土点26′に進入するときの基準進入方向31が、サーベイライン20に対して垂直方向となる走行コース27のデータが生成される。
(もっと読む)
自動上空旋回飛行のための制御システム
【課題】 航空機を、コマンドされた中心及び半径の円(サークル)をぐるりと回るように、コマンドされた高度及び速度で、自動的に飛行させる飛行制御システムを提供する。
【解決手段】 航空機のための飛行制御システムが、円形の地上航跡を画定するための、地理空間上の点の位置及び地理空間上の点を中心とする円の半径の両コマンド値を表すコマンド信号を受信するように構成されている。センサが、航空機の地理空間上の位置を決定し、航空機の位置を表す位置信号を供給する。航空機上で飛行制御装置にコマンドするためのコントローラが、航空機の飛行を制御し、コマンド信号及び位置信号を受信するように構成されている。コントローラは、コマンド信号及び位置信号を用いて飛行制御装置を操作し、概ね円形の地上航跡の接点の方へ航空機を向けるように、そして次に円形の地上航跡に沿って飛行経路を維持するように、航空機の飛行を制御する。
(もっと読む)
自律移動装置及び平面状障害物認識方法
【課題】自律移動装置において、平面状障害物の位置を容易に認識可能とし、自己位置を特定して、効率的で安全な自律走行を可能とする。
【解決手段】レーザビームを用いて水平面内をスキャンし、反射波を受信して複数のスキャンポイントの座標を取得し、得られた順番が時系列的に前後する2つのスキャンポイントについて、前のスキャンポイントを始点とし後のスキャンポイントを終点とする要素ベクトルを形成し、時系列的に前後し、かつ互いに連続する複数の要素ベクトルであって、要素ベクトルの長さがそれぞれ第1所定長以下であり、振れ角度が第1所定角度以下であり、振れ角度の積算値が第2所定角度以下であるものを選択し、ベクトル合成して1つのスキャンセグメントベクトルし、スキャンセグメントベクトルの始点と終点により定義される線分が第2所定長以上であるときに、そのスキャンセグメントベクトルに沿って平面状障害物が存在していると認識する。
(もっと読む)
移動装置
【課題】2輪駆動の移動装置において、高価なセンサを用いずに、駆動輪が障害物に接触したことを駆動輪毎に検出することを可能とし、安価に障害物や移動装置自身の損傷を防止することを可能とする。
【解決手段】移動装置は、制御部の制御により駆動輪が駆動されて移動を開始する(S1)。移動装置は、駆動モータの出力トルクが制御部により制御されることにより、移動経路を移動する(S2)。移動装置1が移動中に、障害物が駆動輪に接触したとき、移動を継続させるために必要な駆動モータの出力トルクが大きくなる。制御部は、左右2つの駆動モータのうち、何れか一方の出力トルクが所定値を超過したときに(S3でYES)、その駆動モータにより駆動される駆動輪に路面上の障害物が接触していることを検出する(S4)。制御部は、この障害物を回避するように2つの駆動モータの駆動を制御し、障害物を回避する動作を実行させる(S5)。
(もっと読む)
物品搬送設備
【課題】 物品搬送車に対する衝撃を抑えながら物品の搬送効率を向上させることができる物品搬送設備を提供する。
【解決手段】 物品搬送車の上下方向での加速度を検出する加速度検出手段を設け、加速度検出手段の検出情報に基づいて、走行経路中における物品搬送車の上下方向での加速度が減速用設定加速度より大きい走行経路部分についての目標走行速度を設定量減速側に補正する。
(もっと読む)
物品処理設備
【課題】 救援車による救援作業の作業性を向上させることができる物品処理設備を提供する。
【解決手段】 床面上を走行自在な物品搬送用の搬送車4を予め設定された物品搬送用の走行経路L2に沿って走行させるべく搬送車4の走行を制御し、且つ、物品処理設備内の機器の異常発生が異常検出部にて検出されると、床面上を走行自在な機器救援用の救援車6を物品搬送用の走行経路L2とは異なる経路として予め設定された救援用走行経路L3に沿って異常発生箇所に走行させるべく救援車6の走行を制御する制御手段を備える。
(もっと読む)
運動体の姿勢角検出装置
角速度センサ(10)で検出された角速度は、微小角行列演算器(12)、行列加算演算器(14)で積分され、行列姿勢角演算器(16)で姿勢角(角速度姿勢角)に復元される。加速度センサ(20)で検出された加速度は、傾斜角演算器(22)、加速度行列演算器(24)で姿勢行列が演算され、行列姿勢角演算器(26)で姿勢角(加速度姿勢角)に復元される。ローパスフィルタ(18)、(28)はそれぞれの低域成分を抽出し、差分器(30)で両者の差分を演算してドリフト分のみを抽出する。減算器(32)で角速度姿勢角からドリフト分を除去して出力装置(34)から出力し、また姿勢角行列演算器(36)で姿勢行列に変換して行列加算演算器(14)にフィードバックする。  (もっと読む)
(もっと読む)
GPSを利用した浄化装置の移動ルート制御法
【課題】浄化装置の移動ルートを複雑な形状を有する湖沼に対応させることを課題とする。
【解決手段】位置発信器6、GPS受信機2の信号にて湖沼中における浄化装置の位置を場所算出手段で算出し、予め設定した移動ルートに従って移動する様、移動方向算出手段4で算出した結果を推進装置駆条件算出手段5で浄化装置に設置した推進方向を制御する制御装置7の制御量を計算し制御装置を駆動する。また、磁石で浄化装置の推進方向を測定し磁石情報14とし移動方向算出手段に信号を伝送し浄化装置の推進方向制御を円滑にする。尚、湖沼形状、浄化装置の移動ルートを情報入力装置10で入力する。入力情報は、表示装置9の表示画面内に出力させ、情報保管装置8で保管する事ができる。
(もっと読む)
移動ロボットの経路生成装置
【課題】ドア通過などの作業を情報に含んだ自律移動経路を自動的に生成して経路移動を実行することができ、また、大規模なエリアの経路計画を高速に求めることができるようにすること。 【解決手段】情報を入力する入力手段3、4と、情報を格納する格納手段5と、ロボットの経路を生成する処理手段1とを備え、前記格納手段5に、ロボットの経路となる廊下や部屋等を適当な単位に分割し、該分割した各単位の情報であるノード要素とロボットが移動できる隣接する前記ノード要素間を接続する情報であるコネクタとを備える地図データを格納し、前記入力手段3、4より前記ロボットの移動開始地点と移動目標地点が与えられた時、前記処理手段1は、前記格納手段5の前記ノード要素と前記コネクタの探索から、前記ロボットの通過するコネクタのリストを生成する。 (もっと読む)
移動ロボット
【課題】 車輪半径の変動などによる位置計測の誤差を低減して、現在位置を高精度に算出できる移動ロボットを安価に実現する。
【解決手段】 移動ロボット1は、車輪を駆動して複数区間からなる走行経路を移動する。記憶部15には、所定区間の始点終点間の距離及び角度差を記録した経路情報が記憶されている。そして、所定区間の終点が判別されると、車輪情報算出部57が、所定区間の始点終点間で計測された車輪回転量と、記憶部15の経路情報とに基づき、車輪径や車輪間隔等の車輪特徴量を算出して記憶部15に記憶する。位置算出部55は、計算された車輪特徴量と計測された車輪の回転量とに基づき現在位置を算出する。
(もっと読む)
移動ロボット
【課題】 移動に伴う障害物検出位置のズレの影響を除去して障害物の誤検知を防止可能にする。
【解決手段】 移動ロボット1は、所定の環境に対応する環境地図73と環境地図73を複数の領域に区分し各領域ごとの投票値を記憶する投票テーブル77とを記憶する記憶部15と、自己の位置に対応した環境地図上の位置を認識する自己位置検出部9と、上記環境内を走査して被測定物の相対位置を検出する障害物検知部11と、検出された被測定物の相対位置に対応する領域に投票値を加算し投票テーブル77に記憶する投票部91と、投票テーブル77の投票値が所定のしきい値以上となったときに該当領域に物体が存在すると判定する物体判定部93とを備えている。
(もっと読む)
移動ロボット
【課題】 車輪半径の変動などによる位置計測の誤差を低減して、現在位置を高精度に算出できる移動ロボットを安価に実現する。
【解決手段】 移動ロボット1は、車輪を駆動して複数区間からなる走行経路を移動する。記憶部15には、区間毎に設定した車輪径および車輪間隔等の車輪特徴量が記憶されている。位置算出部55は、現在走行している区間に対して設定された車輪特徴量と、計測された車輪の回転量とに基づき、現在位置を算出する。経路が左右に傾斜している場合に、谷側の車輪径を小さく設定しておけば、特別な処理を行わずに現在位置を正確に求められる。車輪情報算出部57は、区間の始点終点間で計測された車輪回転量と、同区間の距離および区間両端の角度差といった経路情報とに基づき、車輪特徴量を算出して、この車輪特徴量が位置算出部55で使用される。
(もっと読む)
移動ロボット
【課題】 移動に伴う障害物検出位置のズレの影響を低減して障害物の誤検知を防止可能にする。
【解決手段】 移動ロボット1は、所定の環境に対応する環境地図73を記憶する記憶部15と、自己の位置に対応した環境地図上の位置を認識する自己位置検出部9と、上記環境内を走査して被測定物の相対位置を検出する障害物検知部11と、検出された被測定物の相対位置に対応する環境地図上の位置に投票値を加算する投票部91と、検出された被測定物の相対位置に基づいて投票部91による投票値に重み付けする投票値算出部97と、加算された投票値の累積が所定のしきい値以上となったときに環境地図上の該当位置に物体が存在すると判定する物体判定部93と、を備え、投票値算出部97は、検出された被測定物との距離が大きくなるほど重みを小さくする反比例等の減少関数に従った重み付けにより投票値を算出する。
(もっと読む)
ロボットの自動充電システム。
【課題】 RFIDタグを利用して低コストで構成できるものでありながら、ロボットを充電器に正しく接続できるように確実に誘導させることのできるロボットの自動充電システムを提供する。
【解決手段】 放射方向に向いた複数のRFIDタグ4a〜4eで構成される位置認識モジュール4と、この位置認識モジュール4が取り付けられた充電器1と、電池を電源として自律走行する機能を備えたロボット7とからなり、前記RFIDタグ4a〜4eには少なくとも充電器の位置情報とRFIDタグの取付角度情報が記憶され、前記ロボット7にRFIDタグと送受信する手段が設けられていて読み取ったRFIDタグの情報に基づいて充電器1に向かってロボット7が移動するように構成する。
(もっと読む)
移動体の位置情報補正装置及び方法、その装置を制御するコンピュータプログラムを保存するコンピュータで読み取り可能な記録媒体
【課題】比較的簡単にエラーを累積させずに移動体の位置情報を正確に補正できる移動体の位置情報補正装置及び方法、その装置を制御するコンピュータプログラムを保存するコンピュータで読み取り可能な記録媒体を提供する。
【解決手段】移動体の位置及び方位角のうち少なくとも一つについての情報である位置情報を補正する移動体の位置情報補正装置において、少なくとも一つのビームを発生させるビーム発生部10と、測定された位置情報を入力し、発生したビームを検出し、入力した測定された位置情報を、検出したビームを利用して補正する位置情報補正部12と、を備え、位置情報補正部12は、移動体に装着される。
(もっと読む)
清掃ロボット
【課題】床面や周囲環境の状況に応じて清掃部を制御し、きめ細かな清掃を行うことができる清掃ロボットを提供することにある。
【解決手段】制御部20はレーザーレーダー12,超音波センサ13、距離画像カメラ14で取得する環境情報及び清掃対象域の地図情報に基づいて清掃部のサイドブラシ4やメインブラシ5の回転や高さ位置を制御したり、フラップー7の開閉時間間隔や開閉量を制御するとともに、駆動輪2及び偏心キャスタ3による走行を制御する。
(もっと読む)
移動物体の方向検出方法及びそのシステム
【課題】 一つ以上のマグネティックコンパスの磁場情報及び角度情報を同時に用いて、物体の移動空間における磁場干渉を最小化することで、移動物体の方向を正確に検出する移動物体の方向検出方法及びシステムを提供する。また、移動物体の現在位置が地磁場領域にあるかを判断し、現在位置が地磁場領域にある場合、移動物体に設置された一つ以上のマグネティックコンパスの方位角を移動物体の方向として決定する移動物体の方向検出方法及びシステムを提供する。
【解決手段】 一つ以上のマグネティックコンパスが地磁場領域内に位置するかを判断するために、磁場干渉成分のない一つ以上の地磁場条件を設定する段階;一つ以上のマグネティックコンパスを用いて移動物体に印加された磁場の大きさを計算する段階;計算された磁場の大きさが一つ以上の地磁場条件を満足するかを判断することで、移動物体の方向を検出する段階;を含む。
(もっと読む)
自動シャットオフ機能を備えるモバイル・ビデオ会議プラットフォーム
ロボットと遠隔制御ステーションとを含む、遠隔制御されたロボット・システム。ユーザは遠隔制御ステーションからロボットの動きを制御できる。遠隔制御ステーションは、広帯域ネットワークを介して送信されるロボット制御指令を発生させることが可能である。ロボットは、ネットワークを介して遠隔制御ステーションに送信されるビデオ画像を作成するカメラを有する。ユーザは、ロボット・カメラによってもたらされたビデオ画像を見ながら、ロボットの動きを制御することができる。ロボットが時間間隔の間にロボット制御指令を受信しない場合、ロボットは自動的に動きを停止できる。遠隔制御ステーションが時間間隔内に更新されたビデオが画像を受信しない場合、ステーションは停止指令をロボットに送信することができる。  (もっと読む)
(もっと読む)
自律機械
自律機械(10)を作業区域の自由表面の実質的に全てを横切るように、作業区域の方々に自律機械をナビゲートするための制御システムを提供する。制御システムは、機械(10)に作業区域の境界を追従させ、複数の移動を実施させるよう構成されており、各移動は、機械(10)が作業区域の境界から境界に対してある角度で外側へ移動して、境界へ再び戻ることを含む。機械(10)は各移動の間に作業区域の境界に沿って移動し、かつ機械(10)が実質的に作業区域の全境界を追従しながらこれらの移動を繰り返す。 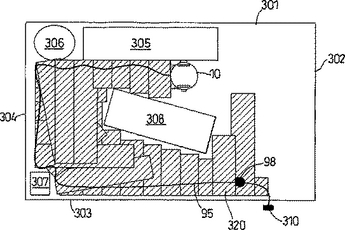 (もっと読む)
(もっと読む)
101 - 120 / 141
[ Back to top ]