
Fターム[5H301GG16]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の方位検出手段 (413)
Fターム[5H301GG16]の下位に属するFターム
ジャイロ (272)
Fターム[5H301GG16]に分類される特許
121 - 140 / 141
移動ロボット、移動ロボットの移動方法および移動プログラム

【課題】処理負担の増加を抑えつつ、正確にかつ効率的に移動することのできる移動ロボットを提供する。
【解決手段】ランドマークを検出可能な経路であるアークと、当該アークにおいて検出可能な前記ランドマークとを対応付けて格納する地図情報格納手段120と、所定の位置間隔でランドマークの有無を検出するランドマーク検出手段106と、検出したランドマークが地図情報格納手段120においてアークに対応付けられているランドマーク以外のランドマークである場合に、ランドマークを検出したときの移動ロボットの位置を特定するロボット位置特定手段100と、ロボットの位置に基づいて作成したアークと、ランドマークとを対応付けて前記地図情報格納手段120に新たに格納させる地図情報更新手段110とを備えた。
(もっと読む)
自律機械
自律真空掃除機(10)などの電気機械は、ケーブル(95)によって電力を供給される。この機械の本体に対するケーブルの向きを検出するための手段が、電位差計(76)に接続された振子(74)などの旋回可能部材の形態で備えられている。電位差計は、振子の自由端の位置に比例する出力信号を提供する。こうして、機械はケーブルの位置を検出することができ、したがって、ケーブルを避けるかまたはこれをたどることができる。ケーブルの極端な位置を検出するためにマイクロスイッチを備えることもできる。  (もっと読む)
(もっと読む)
物品運搬システム

【課題】 ロボットが人から物品を受け取る際に、人に違和感を与えることなく受取動作を行うことが可能な物品運搬システムを提供する。
【解決手段】 物品を把持する開閉可能な把持部と、把持部に作用する外力を検出する外力検出手段と、把持部の開度を検出する開度検出手段と、自律移動手段と、を備えたロボットと、物品受取/受渡作業におけるロボットの行動を決定する受取/受渡行動決定手段240と、を備え、把持部により物品の受取/受渡を行う物品運搬システムであって、受取/受渡行動決定手段240は、把持部が物品を把持していない状態で外力検出手段が第一の所定値以上の外力を検出した場合に、把持部に受取動作を開始させる受取開始判定手段243と、受取動作中において、外力検出手段が検出した外力と、開度検出手段が検出した開度と、の少なくとも一方に基づいて、物品の受取動作完了を判定する受取動作完了判定手段244と、を備えている。
(もっと読む)
自律移動ロボット
【課題】 省スペース化を図るとともに、赤外線照射とスリット光照射とを適切なタイミングで切り換えることができる自律移動ロボットを提供する。
【解決手段】 ロボットRに、自己位置認識手段たるジャイロセンサSR1と、スリット光を照射するレーザ装置71と、赤外線を照射する赤外線LED72と、探索域を撮像するカメラ73と、マークMの位置データを含む地図データを記憶する地図データ記憶部81と、マークMの設置領域と自己位置とを比較してスリット光の照射と赤外線の照射とを切り換える切換判定部82と、を設ける。
(もっと読む)
移動作業ロボット
【課題】作業状態・作業内容などに合わせて、最適な清掃能力で作業することが可能で、作業効率を向上させることができる移動作業ロボットを提供することを目的としている。
【解決手段】本体部11は、本体部11を移動走行させる走行手段12と、走行手段12を制御する走行制御手段25と、床面の塵埃を吸引する電動送風機13と、電動送風機13の吸引力を制御する吸引制御手段24と、吸引した塵埃を検知する塵埃検知手段21と、塵埃検知手段21を制御する検知感度制御手段20とを備え、前記検知感度制御手段20は、作業状態・作業内容により塵埃検知手段21の検知感度を変更する。これによって、作業状態・作業内容に合わせ、その状況時に最適な電動送風機13の吸引力の制御や、走行手段12の走行速度の制御を行い、最適な清掃能力で作業効率を向上させる。
(もっと読む)
自走式移動体の制御方法
【課題】 自走式移動体が自ら作業時間を判断して行動を抑制し、作業する時間帯により、走行や作業に伴って発生する騒音を低減させることができる自走式移動体の制御方法を提供する。
【解決手段】 電源スイッチをON(S1)の後、制御部2に予め与えられた時間帯に関する情報の呼出し(S3)の後、時間帯制御が必要かどうかの判断を行う(S4)。時間帯制御が必要な場合、駆動装置3の駆動速度量と作業装置4の作業速度量の制御を行う(S5,S6)。作業開始してから一定時間tが経過した後、現在時刻の確認(S10)と時間帯入力確認(S11)の後、作業中に予定時間数の超過に起因して時間帯制御が必要か否かを判定し(S12)、時間帯制御が必要な場合、駆動速度量の制御(S13)と作業速度量の制御(S14)を行う。終了時刻が到来か否かを判定し(S17)し、到来時にはフローを終了し、到来していなければ、S9に戻って上記のフローを繰り返す。
(もっと読む)
店舗ロボット
【課題】 スーパーマーケット等の店舗において買い物客による商品購入の利便性を向上させることのできる店舗ロボットを提供する。
【解決手段】 本発明の店舗ロボット1は、商品を収容するカゴ2と、このカゴを自立走行駆動させる移動手段6と、カゴ周囲の障害物を検出する障害物センサー5と、カゴの使用者を認識すると共に、使用者との距離を算出する使用者認識手段4とを有し、使用者認識手段によって算出された距離に基づいて、使用者に追従するよう移動する。
(もっと読む)
移動制御装置および移動制御方法
【課題】 駆動対象の場所によらず、精度よく位置および角度を制御可能な移動制御装置を提供する。
【解決手段】 本発明に係る移動制御装置は、滑り係数記憶部11と、滑り係数に基づいて目標地点までの目標値を演算する目標値演算部12と、滑り係数を同定する同定部13と、温度・湿度計14と、目標地点までの目標値と実際の到達位置とのずれを検出する位置補正計算部15と、位置補正計算部15の計算結果に基づいて補正目標値を生成する補正目標値演算部16と、補正目標値に基づいてアクチュエータ5の目標駆動量を生成する駆動制御部17と、サーボ制御部18と、デッドレコグニング計算部19と、現在地を同定可能な環境認識センサ20と、環境認識センサ20の出力に基づいて現在地を検出する現在地検出部21と、を有する。メッシュごとに設定される滑り係数を、目標値と実際の到達位置とのずれを考慮に入れて同定し、同定された滑り係数を用いて移動ロボットの位置および角度を制御するため、位置および角度の制御を高精度に行える。
(もっと読む)
ロボット制御装置
【課題】 通常時のロボットの移動に影響を与えることなく、必要時にのみロボットの移動経路を変更し、ロボット同士の衝突を避けることが可能なロボット制御装置を提供する。
【解決手段】 ロボット制御装置3は、地図データを取得する地図取得手段380と、ロボットの現在位置データを取得する現在位置取得手段320と、サブゴールデータを取得するサブゴール取得手段350と、サブゴールデータに基づいて、2台のロボットが衝突する可能性があるか否かを判定する衝突可能性判定手段360と、衝突可能性がある2台のロボットのうち、少なくとも1台のロボットの移動経路を、地図データ、現在位置データ及びサブゴールデータに基づいて、衝突可能性がある他のロボットとの衝突を避けるように変更させる移動経路変更命令信号を生成する移動経路変更命令手段390と、移動経路変更命令信号を対応するロボットに送信する入出力手段100と、を備えている。
(もっと読む)
位置把握、追跡および分離のためのオーディオビデオセンサー融合装置および融合方法
【課題】 オーディオおよびビデオセンサーを融合して、複数の音源として存在する特定物体の正確な位置および方向を把握して追跡し、この音源を分離する装置および方法を提供する
【解決手段】 異なる方向から受信した複数のサウンドが追跡する物体のものである尤度を表す音声尤度を求める音声尤度モジュールと、映像内の異なる方向に配置する複数のイメージが追跡する物体である尤度を表す映像尤度を決定する映像尤度モジュールと、音声尤度と映像尤度とが一致するかどうかを判断し、音声尤度と映像尤度とが一致すると判断すれば、音声尤度および映像尤度の決定した対を使用して、物体を認識して追跡し、一致しなければ、前記音源またはイメージ源には追跡する物体が存在しないと判断する、認識および追跡モジュールとを備えることを特徴とする装置。
(もっと読む)
自律移動システム
【課題】自律移動システムにおいて、複数の自律移動装置が他の自律移動装置との干渉でデッドロック等を起こすことのない、全体として安全で効率良い稼働を可能とする。
【解決手段】自律移動システム1における各自律移動装置2は、自律走行するための自律走行手段3、自己の識別情報や自己の稼働状態を示す情報を記憶した装置情報記憶手段4、他の自律移動装置2との通信及びユーザによる目的地や走行指令入力を行うためのインターフェイス5、次ノードに向かう際に当該自律移動装置の経路と交差する経路を移動する他の自律移動装置を抽出する対象装置抽出手段6、他の自律移動装置2が抽出された場合に両装置が交差部に到達する時間が所定の時間内になるかを判断する時間判断手段7、及び、交差部に到達する時間が所定の時間内になる場合に両装置の優先度に基づいて何れを先に移動させるかの判断を行う移動判断手段8を備えている。
(もっと読む)
ロボット掃除機の座標補正方法及びこれを用いたロボット掃除機システム
【課題】 本発明は、角度センサを利用して走行するロボット掃除機の経路追従性能を向上させるために、充電ステーションの絶対座標を基準としてロボット掃除機の座標を補正する方法を提供する。
【解決手段】 本発明に係るロボット掃除機の座標補正方法は、ロボット掃除機が充電ステーションで待機する段階と、ロボット掃除機が作業領域に移動して所定の作業を行う段階と、ロボット掃除機が作業を行う間に、累積角度が設定値の以上になれば、作業を中断し、充電ステーションに復帰する段階と、ロボット掃除機の現在座標を充電ステーションの基準座標と一致させる座標補正段階と、ロボット掃除機が充電ステーションに復帰する前の作業位置に移動して作業を行い続ける段階とを含む。
(もっと読む)
ピッチ変調による車両制御
下地表面上の特定方向への運動に対する車両の前後安定化のための方法。車両は、少なくとも1つの前輪と少なくとも1つの後輪とを有し、前輪は車両の運動の瞬間的な方向に垂直である力により特徴付けられる。モーター作動器は、各々の後輪を駆動し、コントローラは、一律の制御規則に従い、該前輪が該下地表面と接触していても、そうでなくても、該車両を動的に安定化させるように、1つ以上のモーター作動器を支配する。トルクは、車両ピッチまたは運動方向に垂直な前輪にかかる力を基礎として、後輪に適用される。さらに、周期的な回転変調は、後輪に適用され得、車両ピッチまたは前輪にかかる垂直な力のどちらかについて検出された応答に基づいて安定しているトルクが提供される。左右のモーター作動器は、別個に左後輪および右後輪を制御し得、前輪がグランドに接触していても、そうでなくても、ユーザーの操縦により支配される通りにターンを続ける。 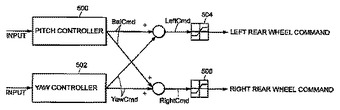 (もっと読む)
(もっと読む)
移動体操作システム
【課題】操作を容易にし、しかも、移動体に対して常に正しい移動指示を行う。
【解決手段】遠隔操作端末は赤外線LEDから偏光板を介して赤外線を発信するとともに超音波発信器から超音波を赤外線と同じタイミングで発信する。移動体は遠隔操作端末からの赤外線を、それぞれ異なる偏光角度を持った偏光板13,14を介してホトディテクタ11,12で受光するとともに超音波を超音波受信器10で受信する。CPU30は赤外線を受信してから超音波を受信するまでの時間をカウンタ31にカウントさせる。そして、このカウントした時間から遠隔操作端末との距離を測定し、この距離がメモリ32に初期設定されている所定の距離に常に一致するように移動体を走行制御する。また、2つのホトディテクタの受光出力のピーク値を検出し、そのピーク値の関係から遠隔操作端末との方向角度を検出し、その方向角度が例えば0°になるように移動体を制御する。
(もっと読む)
航空機の昇降舵の電気飛行制御システム
本発明は航空機の昇降舵用電気飛行制御システムに関する。本発明によれば、飛行制御システムは負荷因子あるいは傾き率で制御できる。本発明のシステムは負荷因子、入射および傾き姿勢であらわされる組み込み式保護手段を備える。 (もっと読む)
移動体検出方法及びシステム
【課題】 マーカーを配置する天井の形状によらずに位置検出が行え、かつ天井へのマーカーの設置コストが安価な移動体位置検出方法及びシステムを提供する。
【解決手段】 本発明の移動体位置検出方法は、移動体に搭載され、画像を撮影してデジタル画像データを出力する撮影手段と、この画像データを画像処理する画像処理手段と、移動体の上方に設置され、色及び形状で各々の座標位置を示し、設置位置の絶対座標を示すマーカで構成された移動体検出システムで移動体の位置を検出する方法であり、撮影部が1以上のマーカを1つの画像で撮影する撮影過程と、画像処理手段が、撮影されたマーカの色,形状を検出及び認識する画像処理で、マーカの絶対座標を検出する座標検出過程と、画像処理手段が、撮影された画像上の中心と、マーカとの相対座標を計算し、検出した絶対座標と相対座標との関係から撮影点の位置を検出する撮影点検出過程とを有する。
(もっと読む)
自走式移動車
【課題】 移動手段とそのための移動制御装置とを備え、1つの光学式変位センサーを用いて前進距離と旋回角度を検知して自動走行をすることができ、省スペース化と、低コスト化とを図ることができる自走式移動車を提供する。
【解決手段】 自走式移動車は、本体1を移動させるための移動手段2と、本体1に設けられている変位センサーとしての一つの光学式変位センサー7と、光学式変位センサー7が検出した移動量に基づいて移動手段2の制御を行う移動制御手段とを備えている。移動制御手段は、光学式変位センサー7が検出した検出量から本体1の直進距離と旋回角度を求める。光学式変位センサー7は、走行床面上の模様等を所定の時間間隔で撮像し時間前後の画像を比較することで移動量を検出する。車輪の回転を検出するための回転センサーを設ける必要がなく、スペースの制約がなくなり、コスト的にも安価となる。
(もっと読む)
移動作業機の自動化構造
【課題】 高い処理能力を要することなく、高い精度で高速化に対応できる移動作業機の自動化構造を提供する。
【解決手段】 移動作業機1の位置を検出する位置検出手段3と、移動作業機1の作動を制御する制御手段49とを備え、移動作業機1の作業領域A0に複数の制御領域A1〜A8を設定するとともに、各制御領域A1〜A8に対応する複数の制御プログラムを備え、制御手段49が、位置検出手段4の検出に基づいて移動作業機1の各制御領域A1〜A8への到達を検知するのに伴って、到達した制御領域A1〜A8に対応する制御プログラムを実行して移動作業機1の作動を制御するように構成した。
(もっと読む)
移動体
【課題】 安価で高精度に、閉じられた活動領域を設定された誘導予定経路に沿って移動することができる移動体を提供する。
【解決手段】 本発明の移動体1は、閉じられた所定の活動領域を自動的に移動する移動体であって、活動領域の地図情報を記憶する地図情報記憶部12と、地図情報記憶部12に記憶された地図情報に対応して移動体1の誘導予定経路を設定する誘導経路設定部13と、誘導経路設定部13により設定された誘導予定経路に基づいて移動体1を誘導制御する制御部17とを備えてなる。
(もっと読む)
輸送手段の位置、姿勢、および/または飛行方向を推定するシステムおよび方法
輸送手段の位置、姿勢、および飛行方向のうちの少なくとも1つを推定するシステムを開示する。このシステムは、輸送手段の3つの相互に直交する軸の回りの慣性角速度を示す信号を出力するように構成された少なくとも3つのジャイロスコープと、輸送手段の3つの相互に直交する軸に沿った加速度を示す信号を出力するように構成された少なくとも3つの加速度計とを含む。このシステムは、さらに、輸送手段の3つの相互に直交する軸への周囲磁場の射影を示す信号を出力するように構成された3軸磁力計を含む。このシステムは、輸送手段高度を示す信号を出力するように構成されたセンサと、輸送手段の対気速度を示す信号を出力するように構成された差圧センサとも含む。このシステムは、さらに、諸信号を受け取り、輸送手段の位置、姿勢、および飛行方向のうちの少なくとも1つを推定するように構成されたデバイスも含む。 (もっと読む)
121 - 140 / 141
[ Back to top ]