
Fターム[5H301GG16]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の方位検出手段 (413)
Fターム[5H301GG16]の下位に属するFターム
ジャイロ (272)
Fターム[5H301GG16]に分類される特許
61 - 80 / 141
移動体制御システム
【課題】移動体の自己位置や移動方向を正確に算出する移動体制御システムを提供すること。
【解決手段】固有IDを有する複数のタグと、所定方向に伸びる検出ラインを備える位置情報供給領域と、タグのIDを読み取る読み取り手段と、検出ラインを検出する検出部とを備え、位置情報供給領域を含む移動領域を移動する移動体と、複数のタグの各々について移動領域内の基準点に対する相対位置座標を登録したマップ情報を記憶する制御部とから構成される移動体制御システムにおいて、制御部内にマップ情報から特定されたマップ情報から読み取ったタグの位置情報を特定する位置情報特定部と、検出部が検出ラインを検出する第1の時刻と、第1の時刻の後に検出ラインを検出する第2の時刻との時間差を計測する時間計測部と、特定した位置情報と、計測した時間差とに基づいて、基準点に対する移動体の相対位置と方向を算出する算出部を設けた。
(もっと読む)
自律移動装置

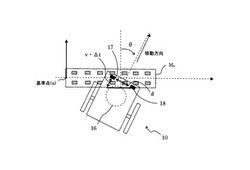
【課題】自律移動装置において、簡単な構成により、自己の側面に障害物が存在する場合であっても、その障害物に衝突することなく、効率的に移動を継続可能とする。
【解決手段】自律移動装置1は、周囲の障害物を検出して障害物位置情報を取得する環境情報取得手段と、障害物位置情報を記憶する記憶手段と、障害物位置情報に基づいて障害物を回避するように移動経路を決定する経路生成手段と、走行のための移動手段とを備えている。環境情報取得手段は、自律移動体1の側方における一定範囲内に障害物Mを検出した際に、仮想の障害物である仮想障害物Xを前方における障害物検出エリアSに仮想的に配置した情報を仮想障害物情報として記憶手段に記憶させる。経路生成手段は、障害物位置情報と仮想障害物情報に基づいて移動経路を決定する。この移動経路に沿って移動することにより、前方障害物とともに側方障害物Mとの衝突を回避しながら効率的に移動できる。
(もっと読む)
座標補正方法、座標補正プログラム、及び自律移動ロボット
【課題】2つの環境地図の間の姿勢ずれを補正することで、一方の環境地図上の点を他方の環境地図の座標系に合わせて座標変換する処理を、自動的に、かつ少ない計算量で行なうことを可能とする。
【解決手段】(a)一方の環境地図の座標系を並進又は回転させることにより、一方の環境地図の姿勢を変動させ、(b)一方の環境地図に含まれる移動不可能な領域である複数の障害物セルの各々について、姿勢変動後の一方の環境地図の各障害物セルから、他方の環境地図における最寄りの障害物セルまでの距離を求める。(c)複数の障害物セルについて算出した最寄りの障害物セルまでの距離の合計値を目的関数として最適化計算を行い、目的関数が最適化される一方の環境地図の姿勢を決定する。(d)最適化計算により得られた一方の環境地図の姿勢に基づいて、2つの環境地図のうちの一方の地図上の座標を、他方の地図上の座標に座標変換する。
(もっと読む)
遠隔制御装置
【課題】被遠隔制御対象体を直感的かつ容易に遠隔制御できる遠隔制御装置を提供する。
【解決手段】遠隔制御装置1は、自走車100とコントローラ200と演算部140,240とを備え、自走車100は、第1の方位基準点101に対する第2の方位基準点102の方位を検知するための方位センサ120を有し、コントローラ200は、第3の方位基準点201に対する第4の方位基準点202の方位を検知するための方位センサ220と、第3の方位基準点201を基準として、自走車100を移動させる移動方向を演算部240に入力するための操作用レバー260とを有し、演算部140,240は、方位センサ120によって検知された方位と、方位センサ220によって検知された方位と、操作用レバー260によって入力された移動方向とに基づいて、自走車100を、第1の方位基準点101を基準として移動方向に向かって移動させるように制御する。
(もっと読む)
配膳車
【課題】保温庫を備えた自走式の配膳車において、配膳車に異常が発生した場合に、サービスセンター又はサービスマンの通信端末装置に異常発生及び配膳車の現在位置を通報し、サービスマンが現場に到着するまでに要する時間を短くする。
【解決手段】保温庫3の保温状態又は移動装置2による走行状態に異常が生じたことを検出する異常検出装置4と、あらかじめ登録されているサービスセンター及び/又はサービスマンの通信端末装置10との間で双方向通信が可能であり、異常検出装置4により異常が発生したと判断されたときに、異常が発生したこと及び現在位置情報を通信端末装置10に送信するとともに、通信端末装置10から送信された信号を受信する無線通信装置5と、無線通信装置5が受信した信号に応じて、保温庫3又は移動装置2を制御する異常状態回復装置6を備える。
(もっと読む)
操船制御方法、プログラム及び装置、並びに自動操船制御システム
【課題】他船や航走体へ追従する操船や、自動操船以外の他の制御装置との間で連携を図った制御が実現できる操船制御方法、プログラム及び装置、並びに自動操船制御システムを得る。
【解決手段】海面又は海中を航行する他船2の位置に関する情報を取得するステップと、少なくとも他船2の位置に関する情報に基づき、自船1が他船2に追従するように、自船1を自動操船させる指令値を求めるステップと、該指令値の情報を自動操船装置20へ出力するステップとを有するものである。
(もっと読む)
位置特定装置および動作指示装置並びに自走式ロボット
【課題】被搬送物等の指示対象物または搬送先等の指示対象位置の位置を特定する際の精度を向上させることができる位置特定装置および動作指示装置並びに自走式ロボットを提供することを目的とする。
【解決手段】複数の対象物の画像から算出した特徴量と位置情報とを関連付けて記憶する記憶部と、指示対象物の画像を取得する画像取得部と、該画像取得部により取得された前記指示対象物の画像から算出した特徴量と前記記憶部に記憶された複数の前記対象物の画像から算出した特徴量との比較を行う比較部と、該比較部による比較結果に基づいて前記指示対象物を特定する指示対象物特定部と、該指示対象物特定部により特定された前記指示対象物に対応する前記対象物の位置情報を、前記指示対象物の位置情報として前記記憶部より抽出する位置情報抽出部とを備える位置特定装置を採用する。
(もっと読む)
移動ロボット及び移動ロボットの危険範囲の表示方法
【課題】移動ロボットの動作内容の変化に伴って変動する危険範囲を人に視覚的に認識させる。
【解決手段】移動ロボット1は、移動ロボット1の動作を制御する動作制御手段(動作計画部100及び動作制御部101)と、移動ロボット1の動作に伴って移動ロボット1の周囲に生じる危険範囲60の形状を、動作制御手段の制御に基づく移動ロボット1の動作内容の変更に応じて変化させながら視覚的に表示する表示手段(表示制御部106及びプロジェクタ107)を有する。
(もっと読む)
ロボット位置検出システム
【課題】 遠隔操作するロボットの位置および方向をディスプレイ上で確認でき、必要に応じてロボットの表示位置および方向を修正できるようにする。
【解決手段】
ロボット10は、走行体11と、走行体11に回動可能に搭載されたビデオカメラ12と、モータエンコーダ15と、角速度センサ16とを有している。遠隔制御装置20のディスプレイ22は、ビデオカメラ12からの映像を表示し、かつ障害物のマップを表示し、ロボット10の位置および方向を示すマークをリアルタイムで表示する。ロボット10の位置および方向は、モータエンコーダ15と、角速度センサ16の情報に基づいて積分演算を行うことにより得る。このロボットの表示位置および方向は、修正することができる。
(もっと読む)
充電制御装置、充電制御システム及びそれらに用いる充電制御方法並びにそのプログラム
【課題】 自律型駆動装置がバッテリ切れで動作不能となることを事前に防ぎ、充電ステーションでの充電作業をスムーズに行うことが可能な充電制御装置を提供する。
【解決手段】 充電制御装置(1)は、自律型駆動装置のバッテリ状況及び消費電力を管理する管理手段(充電管理部111)と、自律型駆動装置におけるバッテリ切れを起こす時期を事前予測する予測手段(バッテリ切れ時間予測部112)と、管理手段で管理する情報及び予測手段の予測結果を基に充電ステーションにおける自律型駆動装置のバッテリへの充電のスケジュールを作成する作成手段(充電スケジューリング部114)と、作成手段で作成されたスケジュールを自律型駆動装置及び充電ステーションに通知する手段(ロボット通信部13及び充電ステーション通信部14)とを有する。
(もっと読む)
自律走行移動体の走行経路決定用地図作成装置及び走行経路決定用地図作成方法
【課題】高速の自律走行に適した走行経路決定用地図を安定して作成できる自律走行移動体の走行経路決定用地図作成装置及び作成方法を提供する。
【解決手段】レーザレンジファインダ11などを具備して走行路上の障害の有無を測る外界計測部10と、デッドレコニングにより自己位置を求める自己位置計測部20と、センサ座標系外界データ及び地上座標系自己位置データにタイムスタンプを付して走行の可否判定を行い且つ自己位置推定結果を生成するデータ解析部30と、各種データのタイムスタンプを基にベース地図を作成する地図作成モジュール40A及びベース地図を基に走行経路を決める走行経路決定モジュール40Bを有する地図作成部40を備え、地図作成モジュール40Aは、走行経路決定モジュール40Bの経路決定処理時間内に自律走行車Cが到達する位置T3を起点とした局所地図Zpをベース地図Zbから切り取って走行経路決定モジュール40Bに送る。
(もっと読む)
飛しょう体の制御装置
【課題】ロールの制御を的確に行なう飛しょう体の制御装置を提供する。
【解決手段】レートセンサから出力された角速度から、ロール系、ピッチ系、ヨー系の制御信号を算出し、さらに飛しょう体の複数の操舵翼の操舵角を算出して角操舵翼を制御する際に、ロール系の角速度又はロール系の姿勢角が大きい場合には、ロール系の角速度又はロール系の角速度を積分して得られたロール系の姿勢角が大きいほどピッチ系及びヨー系の操舵角を小さく抑制することを特徴とする。
(もっと読む)
ロボット位置検出システム
【課題】 床下点検システム等に用いられるロボット位置検出システムにおいて、位置検出の演算速度を向上させる。
【解決手段】
位置検出システムのロボット10は、走行体11と、走行体11に回動可能に搭載されたカメラ12と、ロボットと水平方向に対峙する固定対象物までの距離を複数方向で測定する距離計13とを有している。遠隔制御装置20のディスプレイ22は、カメラ12からの映像を表示し、かつ固定対象物の位置情報を含むマップデータに基づいてマップを表示する。遠隔制御装置20のパソコン21は、ディスプレイ22に表示されたマップにおいて、探査エリアを指定するとともに、ロボットの現在位置が探査エリアにあるとの条件で、距離計13からの複数方向の測定距離情報と上記マップデータに基づき、現在のロボット位置を演算し、このロボット位置をディスプレイ22に表示させる。
(もっと読む)
自律走行型ラインカー
【課題】運動場等に競技用等のラインを引く作業は、複数人による事前準備から最終的なラインを引くまでの間に多くの手間隙が必要であった。また、ラインを引く作業においても、人の手による熟練の度合いにより出来上がりに違いが出てしまう問題があった。
【解決手段】予め作成された競技用等のラインを引く為のデータを、本体内に格納し、ラインカー本体自身がその格納された事前のラインを引くデータを元に自律して走行することにより運動場等に競技用等のラインを正確に引くことができるようにする。
(もっと読む)
充電池搭載移動体の充電装置
【課題】充電池を搭載した移動体が、充電器に自走して到達し、充電する構成を実現することをもくてきとする。
【解決手段】充電器18から発射される赤外線の線束の左右の限界を移動体1に搭載した左信号受信部12、右信号受信部13によって検出し、線束の中心に向かって進行し、再度線束の中心を検出することを繰り返す。また、移動体1の充電用接点11の左右には左ガイド16、右ガイド17が設置され、充電器18側に摺動可能に設けられた電力供給用接点23と充電用接点11が嵌合するのを助ける構成とした。
(もっと読む)
自律走行装置およびプログラム
【課題】装置本体が壁に沿って移動する際でも障害物が検知できるとともに検知遅れがないようにした自律走行装置を提供することを目的とする。
【解決手段】送信側および受信側超音波センサ2a、2bおよび3a、3b、3cと、送信手段4と、増幅手段8と、基準電圧設定手段6と、比較手段7と、超音波の送信後の経過時間を計時する計時手段9と、比較手段7と計時手段9の出力により障害物との距離を認識する距離判定手段11と、送信手段と基準電圧設定手段を制御する制御手段5とを備え、前記制御手段5は、送信手段4により超音波を送信後、予め設定された期間の増幅手段8の出力を無効とするようにしたものである。これによって、制御手段5は、増幅手段8の出力を装置本体の動作モードに応じて無効とするので、装置本体が壁に沿って移動する際でも壁際の障害物が検知できるとともに検知遅れがないものとなる。
(もっと読む)
無人車両の誘導走行制御方法および制御装置
【課題】目標排土点のみを教示することで走行コースを作成できるようにして、教示作業の効率向上等を図り作業効率を向上させる。また無人車両同士の干渉を確実に防止し、しかも精度よく目標に到達できるようにする。
【解決手段】目標排土位置41を、目標進行方向43とは逆向きとなるホッパ坑40から遠ざかる方向に、無人車両10の車体がホッパ坑40に干渉しなくなる位置までずらした位置が、補正目標排土位置42として求められる。つぎに、ホッパ坑40の領域61が、無人車両10との干渉が禁止されるホッパ迂回領域60として作成される。つぎに、このホッパ迂回領域60と、補正目標排土位置42と、前記目標排土位置41における目標進行方向43とに基づいて、無人車両10が、ホッパ迂回領域60と干渉しないで、補正目標排土位置42に目標進行方向43で進入するように、無人車両10を誘導走行させる補正走行コース70´が作成される。
(もっと読む)
自動搬送台車およびその制御方法
【課題】外界センサを用いることなく、走行中の誤差を自動的に修正して自律走行することのできる自動搬送台車およびその制御方法を提供する。
【解決手段】入力された経由点から求めた経路を移動中に、各駆動ユニットの移動量を求めて、その移動量を平均化することで荷台全体の移動量を求め、荷台の移動量が許容範囲内である場合には求めた荷台の移動量から各駆動ユニットの現在位置を求める一方、所定の許容範囲内を超える場合には、誤差のある駆動ユニットを除いた平均値を荷台の移動量として、各駆動ユニットの現在位置を求める。
(もっと読む)
自走式移動体のシステム
【課題】自走式移動体本体と充電台とが確実に接続されて充電が行われる自走式移動体のシステムを提供する。
【解決手段】自走式移動体のシステム100は、制御部116と充電池115とを有し、充電池115からの電力供給によって駆動される自走式移動体本体110と、充電池115を充電するための充電台120と、自走式移動体本体110を充電台120に誘導して自走式移動体本体110を充電台120に接続するための誘導制御手段を備え、誘導制御手段は、充電台120に配置される発光ダイオード122と、自走式移動体本体110に配置される測距センサ113とを含み、測距センサ113は、発光ダイオード122から発射された光を検出して制御部116に信号を送信し、制御部116が信号を受信して充電台120の方向と位置とを認識する。
(もっと読む)
誘導制御システム
【課題】 目標地点や目標経路に誘導する際に、誘導則によって算出される機体のバンク角を達成するための制御方式の設計準備を簡略化させ、飛行環境や機体状態の変化によるゲインの切り替えを最小限に抑えてシステムを簡略化させる。
【解決手段】 フィードバック制御器4は、誘導システム1からの目標バンク角2と機体6からの機体バンク角7との誤差に従い、フィードバック制御信号5を生成する。人工脳神経網3は、急変緩和フィルター9からの出力に従いフィードバック制御信号5を最小化するように修正し、目標バンク角2に応じた制御命令を出力し、出力監視装置10を経て人工脳神経網制御信号11とフィードバック制御信号5に基づき求められた制御信号12を機体6に与えて、機体バンク角7を制御する。
(もっと読む)
61 - 80 / 141
[ Back to top ]