
Fターム[5H301GG28]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 検出手段の配置が限定されているもの (207) | 複数の同一対象検出手段を前後に配置したもの (59)
Fターム[5H301GG28]に分類される特許
1 - 20 / 59
無人搬送システム
無人車両
【課題】誘導ラインが途中で断線していたとしても、姿勢角を修正しながら安定して走行し続けることができる無人車両を提供する。
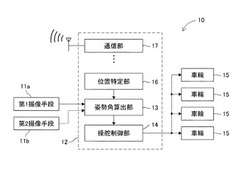
【解決手段】本発明に係る無人車両10は、車長方向に延びる車体中心線上に離間して設けられ、路面の画像データをそれぞれ出力する第1撮像手段11aおよび第2撮像手段11bと、画像データに基づいて姿勢角を算出する姿勢角算出部13と、姿勢角が目標値になるように車輪15の操舵角を制御する操舵制御部14とを備える。姿勢角算出部13は、第1撮像手段11aおよび第2撮像手段11bから出力された2つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第1算出動作、および第1撮像手段11aまたは第2撮像手段11bから出力された1つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第2算出動作を選択的に行う。
(もっと読む)
走行制御装置および車両

【課題】車両が狭い領域を走行する場合においても、物体の衝突回避を行いつつ、車両を安定して走行させることができる走行制御装置および車両を提供すること。
【解決手段】仮想バンパー領域71が道路幅Wrを超えている場合、仮想バンパー領域71の適用仮想バンパー幅を基準形状の仮想バンパー幅(以下「基準仮想バンパー幅」と称す)である2Wvbから縮小し、道路幅Wrとする。これにより、仮想バンパー領域71は、道路幅の内側に存在することになるので、道路端81にある壁やガードレール、縁石などから大きな反発力が車両1の左右方向もしくは前後方向に加えられることを抑制できる。よって、車両1が前進可能であるにもかかわらず停止してしまったり、車両1の操舵が左右に振られてしまうといった問題が生じることを抑制し、安定して車両1を走行させることができる。
(もっと読む)
走行制御装置および車両
【課題】衝突回避対象の物体の種別に応じて、安全に物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】対象物の種別に応じて、その対象物に接触されているバネ73のバネ定数を設定し、そのバネ定数を使用して、収縮したバネ73から車両に加えられる反発力を算出する。これにより、対象物の種別に応じて適宜バネ定数を定義することにより、対象物の存在によって車両に加えられる反発力Frを、対象物の種別に合わせて大きくしたり、逆に、小さくしたりすることができる。よって、優先的に衝突を回避しなければならない物体については、より強い反発力が車両に加えられるようにすることができるので、衝突回避対象の対象物の種別に応じて、安全に物体の衝突回避を行うことができる。
(もっと読む)
搬送車、搬送車の制御方法及びプログラム
【課題】搬送サイクルタイムを短縮することができる搬送車、搬送車の制御方法及びプログラムを提供する。
【解決手段】搬送車は、第一誘導線に対応する方向と異なる方向に対応する第二誘導線を検出した場合、車体に配設された複数の駆動輪の駆動を停止する。搬送車は、複数の駆動輪を第一誘導線に対応する方向から第二誘導線に対応する方向に旋回する。搬送車は、第一誘導線に対する側方向の別と、走行方向前後の複数の位置における第一又は第二誘導線に対する車体の各位置偏差とに基づいて、駆動停止を継続する一つの駆動輪及び駆動を開始する他の駆動輪を決定する。
(もっと読む)
移動ロボット及び移動ロボットの制御方法
【課題】制御コストの低減を図ったうえで、所定の移動経路に沿って確実に往復移動し得る移動ロボット及び移動ロボットの制御方法を提供する。
【解決手段】移動ロボット本体2と、移動ロボット本体2を全方向に移動させると共に超信地旋回させる駆動機構4と、移動ロボット本体2の前部及び後部にそれぞれ配置されて、移動面に設定された移動経路Rを検出する前部センサ部5F及び後部センサ部5Rと、往路移動時において、前部センサ部5Fの3個のセンサ5Fl,5Fc,5Frと移動経路Rとの位置関係に応じて駆動機構4を制御することで、移動ロボット本体2を移動経路Rにトレースさせ、復路移動時において、後部センサ部5Rの3個のセンサ5Rl,5Rc,5Rrと移動経路Rとの位置関係に応じて駆動機構4を制御することで、移動ロボット本体2を移動経路Rにトレースさせる制御部10を有している。
(もっと読む)
移動ロボット
【課題】他の物体に接触したことによる移動を、自己位置推定に反映することができる移動ロボットを提供する。
【解決手段】本発明の移動ロボットは、移動ロボットが他の物体に接触したことを検出する接触検知センサと、接触検知センサの検出結果に応じた、接触による移動を推定した接触移動推定モデルに基づいて、接触による移動ロボットの移動量を推定する移動量推定部と、移動量推定部によって推定された移動量に基づいて、自己位置を推定する自己位置推定部を有する。
(もっと読む)
衝突防止機能付き車両
【課題】障害物との衝突を防止しつつ、必要以上に車両の運動が制限されないことを可能とする。
【解決手段】 この車両は、入力された目標速度及び目標進行方向で車体50が所定時間だけ移動するときに車体が通過すると予測される車体通過予測領域と、障害物検知部で検出された障害物の位置とから、車体と障害物とが衝突するか否かを判定する。そして、車体と障害物とが衝突すると判定されるときは、入力部への入力に応じた目標速度及び目標進行方向の少なくとも一方を修正する。車体通過予測領域は、予め設定された車体モデル70に基づいて算出され、その車体モデル70は入力された目標速度及び目標進行方向に応じて変化する。
(もっと読む)
無人搬送システムおよび無人搬送車
【課題】パレットの脚部の設置状況によることなく、無人搬送車をパレットの脚部間において正確に誘導できる無人搬送システムおよび無人搬送車を提供すること。
【解決手段】進入口Eからパレット100の下方(左右の脚部102の間)へ進入した無人搬送車1は、第1および第2レーザセンサ79a,79bを用いて、パレット100の台部101の下面に設けられている誘導体103までの距離を測定して、その測定値とレーザ測定メモリ72aに記憶される目標値(第1および第2レーザセンサ79a,79bのそれぞれから車体2の前後方向に延びる中心線までの距離)とが一致するように走行方向の制御を行う。ここで、誘導体103は、脚部102の設置状況とは無関係に、台部101の前後方向に延びる中心線に沿って連続して設けられているので、脚部102の設置状況によることなく、無人搬送車1を、パレット100の略中央部において走行させることができる。
(もっと読む)
走行データ生成装置
【課題】走行データを生成するために予め記憶手段に記憶しておくデータの量を抑制できる走行データ生成装置を提供すること。
【解決手段】上位プロコンより行先指令が通知されると、無人搬送車両を走行させるために必要な動作コマンド列が、事前に設定されるテーブルから必要分抽出されて、動作コマンド列全体が生成される。本実施形態では、走行経路R上に配置されるステーションCの中から、隣設する3つのステーションCの組み合わせだけを全て求め、その各組み合わせに対応する動作コマンド列をテーブルに設定している。よって、隣設するもの及びしないものを含む2つのステーションCの各々について、その組み合わせを全て(総当たりで)求め、その組み合わせに対応する動作コマンド列をテーブルに設定するよりも、ステーションCの組み合わせの数を少なくできるので、テーブルのサイズを小さくできる。
(もっと読む)
移動装置、移動装置の制御方法及びプログラム
【課題】推測航法から誘導方式へスムーズに切り替えることができる移動装置、移動装置の制御方法及びプログラムを提供する。
【解決手段】誘導線に対する位置偏差を検出する検出手段と、推測航法に係る仮想誘導線に対する位置偏差を算出する算出手段とを備え、前記検出手段が検出した位置偏差又は前記算出手段が算出した位置偏差に基づいて、移動に係る制御量を算出する移動装置において、前記検出手段が検出した位置偏差及び前記算出手段が算出した位置偏差を結合する結合手段と、該結合手段が結合した位置偏差に基づいて、移動に係る制御量を算出する手段とを備える。
(もっと読む)
スポット誘導走行車
【課題】カーブ部分を的確に通過することのできるスポット誘導走行車を提供すること。
【解決手段】複数のマークのそれぞれを検出することのできる検出装置110と、検出結果を用いて求められる、第一マークの位置におけるスポット誘導走行車の状態を示す第一状態情報を取得する状態取得部122と、第一状態情報と目標状態情報とに基づいて、第一操舵条件を決定する操舵条件決定部124と、第一操舵条件に従って、スポット誘導走行車100の走行を制御する制御部120と、第二マークの位置におけるスポット誘導走行車100の状態を示す予測情報を算出する予測部126とを備え、状態取得部122は、予測情報と実測情報との差分を示す第二状態情報を取得し、操舵条件決定部124は、第二状態情報に示される差分に応じて第二操舵条件を決定し、制御部は、第一操舵条件に代えて第二操舵条件に従って、スポット誘導走行車100の走行を制御する。
(もっと読む)
無人搬送車の走行制御装置、および無人搬送車
【課題】屈曲部を過ぎた後の姿勢修正を早期に終了させることができる無人搬送車の走行制御装置、および無人搬送車を提供する。
【解決手段】本発明に係る走行制御装置2Aは、走行経路に沿って敷設された走行ガイドの位置を検知しながら走行する無人搬送車1Aの走行制御装置であって、走行ガイドとの相対位置に応じたセンサ出力信号をそれぞれ出力する前部ガイドセンサ3aおよび後部ガイドセンサ3bと、現在位置を特定する位置特定手段4a、4b、10と、位置に対応した前部ガイドセンサ用の目標センサ出力値と後部ガイドセンサ用の目標センサ出力値とが予め格納された記憶部11と、記憶部11を参照して現在位置に対応する目標センサ出力値を取得し、各ガイドセンサ3a、3bから出力されたセンサ出力信号の値と目標センサ出力値との差が極小となるように操舵方向を変化させる操舵制御部12とを備えている。
(もっと読む)
自律走行搬送システム
【課題】どのような経路であってもその経路に沿って搬送することができ、且つ経路から外れた場合に迅速、且つ的確にもとの経路に戻ることができる自律走行搬送システムを提供する。
【解決手段】搬送経路に配置された複数のICタグと、走行駆動機構と、前記ICタグの情報を読み取るタグリーダと、これらの走行駆動機構とタグリーダの動作をコントロールする制御部とを備え位置を把握しながら搬送経路に沿って走行する搬送台車とにより構成され、制御部は、搬送経路に関するマップ情報を格納するメモリと、ICタグ情報とマップ情報に基づいてドライバをコントロールするCPUとを備え、CPUは、前記マップ情報を基に搬送台車をICタグの間で自律走行させる一方、複数のタグリーダからのICタグ情報により搬送台車の搬送経路からのずれを検出してドライバに走行修正信号を送付するようにした。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域において予め定められた走行パターンに従って走行すると共に、角速度センサの出力を適正に較正するようにした自律走行作業車の制御装置を提供する。
【解決手段】作業車の重心位置の鉛直軸回りに生じる角速度を示す出力を生じるYawセンサと車輪速を示す出力を生じる車輪速センサの出力に基づいて算出される進行方位と走行距離に基づき、走行予定領域において予め定められた走行パターンに従い、作業車を直進走行させつつ、作業させる走行作業制御において、直進走行のとき、予め定められた走行パターンで予定される予定走行距離L1と実走行距離L2の差が誤差許容値αを超えるか否か判定し(S10からS18)、差が誤差許容値を超えると判断されるとき、Yawセンサの出力の中心値を補正する(S22)。
(もっと読む)
無人搬送車
【課題】加熱炉外の出発点から加熱炉内の目標点まで正確に走行できると共に、加熱炉外のスペースを有効利用できるようにした無人搬送車を提供する。
【解決手段】荷役ステーションから加熱炉Yに向かって走行する無人搬送車1を、加熱炉Yの外部において第1および第2ガイドセンサ78a,78bと第1マークセンサ79aとを使用して走行させ、加熱炉Yの内部において第1〜第3レーザセンサ80a,80b,80cとを使用して走行させることで、加熱炉Yの内部に設定された停止位置(目標点)に停止させることができる。
(もっと読む)
搬送装置
【課題】搬送車に所定の積載物が設置されているか否か(所定の積載物の有無)を確実に特定可能であり、障害物検出手段による検出範囲を所定の積載物の有無に応じて正確に変更可能な搬送装置を提供する。
【解決手段】搬送車11と、バンパーセンサ12と、制御装置15と、を有する搬送装置10であって、搬送車11に所定の積載物(自動車のボデー1・台車3)が設置されているか否かを検出して、搬送車11に前記所定の積載物が設置されている場合には積載物信号を出力する積載物検出手段(センサ13・14)を有し、前記所定の積載物の寸法は、搬送車11の寸法よりも大きく構成され、制御装置15は、前記積載物検出手段から前記積載物信号を受信した場合に、バンパーセンサ12による検出範囲を前記所定の積載物の寸法に応じた広さに変更することを特徴とする。
(もっと読む)
移動体の誘導制御システム及び誘導制御方法
【課題】 磁気マーク等のランドマークを床面に分散配置しても、自律移動体に走行軌道の再現性をたかめ、誘導制御システムの低コスト化と柔軟性の向上を実現する。
【解決手段】床面等に設置されたマーカーと、該マーカーを検出して予め定められた走行軌道に沿って自律移動体を自律走行させる際、移動体の走行軌道に基づいて床面等にマーカーを分散して離隔配置する。軌道習得走行により、このマーカーに沿わせながら、再現すべき軌道に沿って移動体を走行させ、移動体の走行面における2次元座標及び走行方向を走行軌道と、マーカー検出部の検出履歴を記録する。記録された走行軌道とマーカー検出履歴に基づいて、マーカーのマップと走行軌道を生成し、移動体を走行させる際、走行軌道とマーカー検出履歴に基づいて、マーカーのマップを更新する。
(もっと読む)
搬送車及び判定方法
【課題】本発明は、誘導線からの逸脱を早期に検出する搬送車及び判定方法を提供する。
【解決手段】誘導テープ2に対するガイド偏差が走行方向前側に配置したガイドセンサ14aにより検出される。搬送車1の制御部15は、検出したガイド偏差が略零となるよう転舵部131a、131b夫々の転舵角度を制御し、搬送車1は誘導テープ2に沿って搬送する。搬送車1の走行方向左側又は右側が障害物3に衝突した場合、搬送車1が障害物3との接触点を略中心とし、床面を略回転面として回転する。制御部15は、回転に伴って走行方向後側に配置されたガイドセンサ14bが誘導テープ2を検出しなくなった場合、誘導テープ2から逸脱したと判定する。
(もっと読む)
無人搬送車
【課題】荷の状態に応じた車速制限を実現することにより、搬送効率を向上させる。
【解決手段】無人搬送車において、荷の重心位置の偏りと旋回方向を判定条件として車速制限を行う。すなわち、右偏り、かつ左旋回の場合、及び左偏り、かつ右旋回の場合に車速制限を行い、荷の重心位置が偏っていない場合や偏りがあっても、安定した状態で走行可能な方向に旋回させる場合には、車速制限を行わない。これにより、荷の状態に応じた車速制限が実現されるとともに、搬送効率を向上させることができる。
(もっと読む)
1 - 20 / 59
[ Back to top ]