
Fターム[5H301HH01]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の操舵態様 (687) | 移動経路からの偏位量を用いた操舵 (243)
Fターム[5H301HH01]に分類される特許
1 - 20 / 243
無人車両
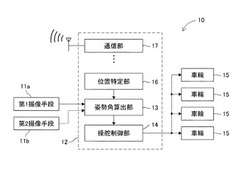
【課題】誘導ラインが途中で断線していたとしても、姿勢角を修正しながら安定して走行し続けることができる無人車両を提供する。
【解決手段】本発明に係る無人車両10は、車長方向に延びる車体中心線上に離間して設けられ、路面の画像データをそれぞれ出力する第1撮像手段11aおよび第2撮像手段11bと、画像データに基づいて姿勢角を算出する姿勢角算出部13と、姿勢角が目標値になるように車輪15の操舵角を制御する操舵制御部14とを備える。姿勢角算出部13は、第1撮像手段11aおよび第2撮像手段11bから出力された2つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第1算出動作、および第1撮像手段11aまたは第2撮像手段11bから出力された1つの画像データにおける誘導ラインの位置に基づいて姿勢角を算出する第2算出動作を選択的に行う。
(もっと読む)
画像処理装置、運転支援装置、画像処理方法及び画像処理プログラム

【課題】移動体が移動する際の安全を確保するための画像処理装置を提供する。
【解決手段】移動体の予測軌道と、三次元モデルにおける移動体の位置及び大きさと、三次元モデルにおける立体物の大きさ及び位置とに基づいて、三次元モデルにおいて予測軌道上で移動体が立体物に接触するか否か判定する接触判定部260を備える。また、ステレオカメラの画像に基づいて距離を測定し、立体物の位置及び大きさを算出する。さらに、算出した横幅の接触量に基づいて予測軌道を変更した上で接触するか否か判定する。
(もっと読む)
自動搬送システム
【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
移動体の自己位置判別装置
【課題】位置判別演算開始点における移動体の進行方向角度(方位)を実際に移動するエリヤに設定した角度(方位)に対して誤差が少なく簡単に合わせることのできる移動体の自己位置判別装置を得る。
【解決手段】移動体10の両側面に移動体10の進行方向に直角に光電センサ12、13を取り付け、光電センサ12、13の光を反射するための反射板14、15を、移動エリヤの倉庫入口1の両側に、光電センサ12、13の光軸と対向するように設置する。倉庫入口1を移動車10が通過するときの光電センサ12、13の動作時間差を利用して通過時の角度を算出する。
(もっと読む)
搬送車、搬送車の制御方法及びプログラム
【課題】搬送サイクルタイムを短縮することができる搬送車、搬送車の制御方法及びプログラムを提供する。
【解決手段】搬送車は、第一誘導線に対応する方向と異なる方向に対応する第二誘導線を検出した場合、車体に配設された複数の駆動輪の駆動を停止する。搬送車は、複数の駆動輪を第一誘導線に対応する方向から第二誘導線に対応する方向に旋回する。搬送車は、第一誘導線に対する側方向の別と、走行方向前後の複数の位置における第一又は第二誘導線に対する車体の各位置偏差とに基づいて、駆動停止を継続する一つの駆動輪及び駆動を開始する他の駆動輪を決定する。
(もっと読む)
無人搬送車
【課題】SLAM技術を用いた無人搬送車であっても、古典的な誘導方法で走行する無人搬送車と同様に簡単な方法で走行制御の破綻を監視することができる無人搬送車を提供すること。
【解決手段】SLAM技術を用いて現在位置を求め、求められた現在位置を基に、予め設定されている経路データ123に沿って走行し、経路データ123と無人搬送車1の現在位置とのずれを補正するための旋回角θ及び無人搬送車1の進路方向が目標位置に向くための操舵角ρを無人搬送車1が経路データ123に沿って走行するように補正しながら制御する制御手段10と、制御手段10による補正量の変動を監視するとともに、補正量が外乱によって制御可能な範囲を逸脱したときに走行を停止する監視手段11とを備える。
(もっと読む)
自動走行車および自動走行システム
【課題】走行位置検出におけるノイズの影響を受けにくく、トラブル発生時の再発車等も容易な自動走行車を用いた自動走行システムを提供する。
【解決手段】自動走行車1は、走路上の走行が可能な車台部10と、走路上に設けられた誘導線21を検出する誘導線センサ2と、誘導線センサにより検出された誘導線に沿って車台部を走行させるとともに、誘導線に設けられた制御情報24,25を読み取る情報読み取り部を備えたコントローラ4と、走路上に誘導線とは別に設けられた色ガイド31,32の色を検出する色センサとを有する。コントローラは、色センサにより検出された色ガイドの色と情報読み取り部により読み取った制御情報とに応じて車台部の制御を行う。
(もっと読む)
移動体システムと移動体の走行制御方法
【課題】
カーブ区間で移動体の位置を正確に求め、移動体を高い精度で移動させる。
【構成】
移動体の走行への制御中心から、移動体の走行方向とは異なる方向にシフトした位置で、走行方向に沿った移動体の位置を検出する検出器を設ける。移動体の走行経路中の少なくともカーブ区間に対して、検出器の出力に対する制御中心の走行方向に沿った位置を記憶部に記憶し、記憶部から読み出した制御中心の位置に基づき、移動体の走行を制御部により制御する。
(もっと読む)
車両用障害物検出装置及びそれを用いた車両
【課題】走路上の障害物を検出する障害物検出装置を提供する。
【解決手段】
車両前方を撮影する赤外線カメラ2と、車両前方を撮影するステレオカメラ3と、赤外線カメラ2により撮影された赤外線画像を基に走路を特定する走路特定部5と、ステレオカメラ2により撮影された各画像に基づいてステレオ画像を作成するステレオ画像作成部6と、走路特定部5により特定された走路とステレオ画像とに基づいて、走路上の障害物を特定する障害物検出部7とを備える。
(もっと読む)
無人搬送車の誘導ライン撮像装置、および無人搬送車
【課題】白とびのない画像データを生成することができる誘導ライン撮像装置、および該装置を備えた無人搬送車を提供する。
【解決手段】本発明に係る誘導ライン撮像装置は、路面に敷設された誘導ラインに沿って走行する無人搬送車に備えられた誘導ライン撮像装置であって、誘導ラインを含む領域を撮像面で光学的に撮像して該領域の画像データを生成する撮像手段と、撮像する領域を照射面から照射した光によって照らす1つ以上の照明手段と、撮像面上に設けられた第1偏光フィルタ6と、照射面上に設けられた第2偏光フィルタ7とを備え、第1偏光フィルタ6を透過し得る光L5の振動方向および第2偏光フィルタ7を透過し得る光L2(L3)の振動方向が異なることを特徴とする。
(もっと読む)
車両および車両制御プログラム
【課題】自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行経路を決定できる車両および車両制御プログラムを提供すること。
【解決手段】車両1が、予め設定された走行軌道に沿って自動走行を行っている場合に、搭乗者がジョイスティック13を傾斜操作すると、走行制御装置100は、その傾斜方向(操作角度δ)に基づいて進行すべき道路を選択し、その道路へ進入するための走行軌道を走行軌道メモリ93bに格納する。これにより、搭乗者の意思に基づいて指示された車両1の進行すべき方向に基づいて走行軌道が設定され、その走行軌道に沿って車両1の走行を制御できる。よって、自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行軌道を決定できる。
(もっと読む)
無人搬送システムおよび無人搬送車
【課題】パレットの脚部の設置状況によることなく、無人搬送車をパレットの脚部間において正確に誘導できる無人搬送システムおよび無人搬送車を提供すること。
【解決手段】進入口Eからパレット100の下方(左右の脚部102の間)へ進入した無人搬送車1は、第1および第2レーザセンサ79a,79bを用いて、パレット100の台部101の下面に設けられている誘導体103までの距離を測定して、その測定値とレーザ測定メモリ72aに記憶される目標値(第1および第2レーザセンサ79a,79bのそれぞれから車体2の前後方向に延びる中心線までの距離)とが一致するように走行方向の制御を行う。ここで、誘導体103は、脚部102の設置状況とは無関係に、台部101の前後方向に延びる中心線に沿って連続して設けられているので、脚部102の設置状況によることなく、無人搬送車1を、パレット100の略中央部において走行させることができる。
(もっと読む)
操舵制御装置
【課題】搬送車両に多数の車軸が設けられている場合でも、その搬送車両を走行経路に沿って円滑に走行させることができる操舵制御装置を提供すること。
【解決手段】本実施形態では、各走行装置5a〜5lの車軸6aに対して操舵角θ1〜θ12を設定する場合に、操舵角設定テーブル72cから、各操舵角θ1〜θ12を取得している。よって、計算式により各操舵角θ1〜θ12を算出する場合よりも、演算量を少なくできるので、CPU71の演算時間も短くできる。従って、本実施形態のように、走行装置5a〜5lの数が多い場合でも、CPU71に掛かる負担が大きくならず、演算時間も長くならない。故に、各操舵角θ1〜θ12の設定を短い周期で実行することができ、走行経路R上に沿って無人搬送車両1を円滑に走行させることができる。
(もっと読む)
移動装置、移動装置の制御方法及びプログラム
【課題】推測航法から誘導方式へスムーズに切り替えることができる移動装置、移動装置の制御方法及びプログラムを提供する。
【解決手段】誘導線に対する位置偏差を検出する検出手段と、推測航法に係る仮想誘導線に対する位置偏差を算出する算出手段とを備え、前記検出手段が検出した位置偏差又は前記算出手段が算出した位置偏差に基づいて、移動に係る制御量を算出する移動装置において、前記検出手段が検出した位置偏差及び前記算出手段が算出した位置偏差を結合する結合手段と、該結合手段が結合した位置偏差に基づいて、移動に係る制御量を算出する手段とを備える。
(もっと読む)
スポット誘導走行車
【課題】カーブ部分を的確に通過することのできるスポット誘導走行車を提供すること。
【解決手段】複数のマークのそれぞれを検出することのできる検出装置110と、検出結果を用いて求められる、第一マークの位置におけるスポット誘導走行車の状態を示す第一状態情報を取得する状態取得部122と、第一状態情報と目標状態情報とに基づいて、第一操舵条件を決定する操舵条件決定部124と、第一操舵条件に従って、スポット誘導走行車100の走行を制御する制御部120と、第二マークの位置におけるスポット誘導走行車100の状態を示す予測情報を算出する予測部126とを備え、状態取得部122は、予測情報と実測情報との差分を示す第二状態情報を取得し、操舵条件決定部124は、第二状態情報に示される差分に応じて第二操舵条件を決定し、制御部は、第一操舵条件に代えて第二操舵条件に従って、スポット誘導走行車100の走行を制御する。
(もっと読む)
移動体
【課題】設定された軌道を適切に走行する移動体を提供する。
【解決手段】移動体10は、駆動輪130と、現在の位置及び方向を取得する位置情報取得手段110と、位置情報取得手段110により取得された位置情報および移動体の軌道の情報を記憶する記憶手段120と、制御手段140と、を有する。制御手段140は、距離偏差と角度偏差を求め、駆動輪の回転速度と距離偏差および角度偏差の時間変化との関係を算出する演算手段141と、移動体の並進速度としてフィードフォワード値を与える設定手段142と、を備え、距離偏差と、角度偏差と、距離偏差のゲインと同一のゲインを用いた距離偏差の時間変化と、を用いてフィードバック制御を行う。
(もっと読む)
無人搬送車の走行制御装置、および無人搬送車
【課題】特殊なキャスタを使用しなくても、路面の補強にかかる手間およびコストの低減と、失敗のない荷物の受け渡しとを可能にする無人搬送車の走行制御装置、および無人搬送車を提供する。
【解決手段】走行制御装置7は、車体2の走行方向一方側および他方側に各1つ設けられ、走行ガイド10からの位置ずれに関する信号を出力する2つのガイドセンサ3、4と、各ガイドセンサ3、4から出力された信号に基づいて操舵制御を行う操舵制御部8とを備え、操舵制御部8は、スイッチバック後、所定距離を走行するまでの間または所定時間が経過するまでの間は、走行方向前側にあるガイドセンサ3の位置ずれが予め設定されたゼロ以外の目標位置ずれ量となり、かつ走行方向後側にあるガイドセンサ4の位置ずれが実質的にゼロとなるように操舵制御を行う。
(もっと読む)
無人搬送車の走行制御装置、および無人搬送車
【課題】屈曲部を過ぎた後の姿勢修正を早期に終了させることができる無人搬送車の走行制御装置、および無人搬送車を提供する。
【解決手段】本発明に係る走行制御装置2Aは、走行経路に沿って敷設された走行ガイドの位置を検知しながら走行する無人搬送車1Aの走行制御装置であって、走行ガイドとの相対位置に応じたセンサ出力信号をそれぞれ出力する前部ガイドセンサ3aおよび後部ガイドセンサ3bと、現在位置を特定する位置特定手段4a、4b、10と、位置に対応した前部ガイドセンサ用の目標センサ出力値と後部ガイドセンサ用の目標センサ出力値とが予め格納された記憶部11と、記憶部11を参照して現在位置に対応する目標センサ出力値を取得し、各ガイドセンサ3a、3bから出力されたセンサ出力信号の値と目標センサ出力値との差が極小となるように操舵方向を変化させる操舵制御部12とを備えている。
(もっと読む)
環境地図生成方法
【課題】自己位置推定誤差が生じる場合であっても、移動体と障害物との接触を回避可能な環境地図生成方法を提供すること。
【解決手段】本発明にかかる環境地図生成方法は、環境地図を格納するメモリ12と、周囲の環境情報を取得するセンサ11と、を備え、環境地図に基づいて自律移動する移動体1の環境地図生成方法である。まず、実環境に基づいて環境地図を生成する。次に、環境地図における狭路部の地図情報を削除する。そして、移動体1が狭路部を自律移動する場合、センサ11により取得した当該狭路部の環境情報に基づいて、環境地図における当該狭路部の地図情報を生成する。
(もっと読む)
走行制御システム
【課題】移動体の制御を安価にすることができ目標位置まで自動で移動することを目的とする。
【解決手段】移動体100に備えられ信号光を投光及び検知可能な投光機20と、投光機20が投光する信号光と同じ方向へ超音波を送信すると共に送信した超音波を検知する2つの超音波センサ30と、移動体100の目標位置200に備えられ投光機20の投光する信号光を反射する反射板50から構成する走行制御システム10であって、移動体100は、投光機20で移動体100の進行方向を検知した後、2つの超音波センサ30で移動体100の目標位置200に対する移動体100の傾きを補正しながら目標位置200まで移動することを特徴とする走行制御システム10。
(もっと読む)
1 - 20 / 243
[ Back to top ]