
Fターム[5H301KK18]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 制御信号、検出信号の伝送手段の限定 (229) | 双方向伝送が可能なもの (71)
Fターム[5H301KK18]に分類される特許
1 - 20 / 71
物品処理設備
【課題】物品の搬送を停滞なく適切に行えるようにしながらも、装備する無人搬送車の台数を減少させて設備の設置コストの低下を図ることができる物品処理設備を提供する。
【解決手段】外部搬出入部Bに位置する物品Pを自動倉庫Aの物品入出庫部2に搬送する物品搬入処理、及び、自動倉庫Aの物品入出庫部2に位置する物品Pを外部搬出入部Bに搬送する物品搬出処理を行うべく、無人搬送車担当経路における自動倉庫側に位置する倉庫側物品移載部F及び外部搬出入部側に位置する外部側物品移載部Gとの間での搬送作業を無人搬送車10に割り付ける搬送管理手段が、割込み要求が指令されたときには、倉庫側物品移載部Fと外部側物品移載部Gとの間での搬送作業の一部の搬送作業を、作業者によって運転される有人搬送車Mに割り付けるように構成されている。
(もっと読む)
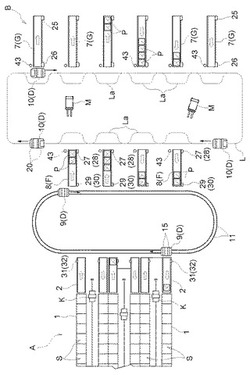
処理設備

【課題】処理装置の制御負荷の増加を回避しながらも、処理作業効率の向上を図ることができる処理設備を提供する。
【解決手段】複数の処理装置1及び処理対象物を貯留する貯留装置Qを経由する搬送ラインに沿って走行して処理対象物を搬送する搬送車3を管理する搬送管理手段HCが、処理装置1から主管理手段JCに対して通信される処理進行情報を監視して、複数の処理装置1のうちで、処理対象物の処理が終了した又は終了間近である処理装置1を、主管理手段JCから搬送指令情報が通信されてくる以前に、事前搬送元として抽出し、その処理装置1から処理対象物を搬出するために、事前搬送元として抽出した処理装置1に対して搬送車3を走行させる事前搬送制御を実行するように構成されている。
(もっと読む)
搬送車システム、速度決定方法
【課題】環状の軌道上を一方通行で走行する搬送車を備える搬送車システムにおいて実荷状態で走行する搬送車の状況を把握し、搬送車システムの搬送効率を向上させる。
【解決手段】環状の軌道101と、搬送車102と、ステーション103とを備え、さらに、荷物を搬送する計画を示す情報である搬送計画を取得する搬送計画取得部104と、ステーション103、および、セグメントのレイアウト情報であるマップを取得するマップ取得部105と、搬送計画とマップとからセグメント毎に荷物を積載した状態で搬送車が通過する回数である実荷通過度数を算出する度数算出部106と、周回方向において実荷通過度数が連続的に増加するセグメントの区間である増加区間を特定する増加区間特定部107と、増加区間の実荷通過度数の低いセグメントにおける搬送車102の速度を低下させる制御部108とを備える。
(もっと読む)
搬送車システム
【課題】各搬送車に対する搬送要求の割り当てを効率よく行うことのできる搬送車システムを提供すること。
【解決手段】複数のステーション120に沿って設けられた一方通行の経路105と、複数の台車140と、コントローラ110とを備える搬送車システムであって、コントローラ110は、数の搬送要求を複数の台車140に通知する要求通知部112を有し、複数の台車140のそれぞれは、複数の搬送要求を受信する要求取得部142と、先行搬送車から、複数の搬送要求のうちの、先行搬送車が実行を予定する搬送要求を示す先行車情報を受信する受信部144と、先行車情報を参照することで特定される、複数の搬送要求のうちの当該搬送車が実行可能な1以上の搬送要求の中から、当該搬送車が実行する搬送要求である実行要求を決定する決定部146と、実行要求を示す情報を、後続搬送車に送信する送信部148とを有する。
(もっと読む)
搬送システム
【課題】搬送車両の充電作業が搬送作業に与える影響を従来よりも低減すると共にバッテリの大型化を抑制する。
【解決手段】蓄電池によって駆動され、電力を外部から受電及び外部に給電する複数の搬送車両3と、搬送車両3が走行する複数の走行軌道1A,1Bと、ある走行軌道1Aと他の走行軌道1Bとが隣接するエリアであって、ある走行軌道1Aを走行する搬送車両3と他の走行軌道1Bを走行する搬送車両3とが給電/受電する受給電エリアKa,Kbとを具備する。
(もっと読む)
搬送用走行体の走行制御方法
【課題】地上側から作業区間WA内の全ての搬送用走行体1に対して走行可信号を確実に伝送する手段のコストダウン、実施の容易化を図る。
【解決手段】各搬送用走行体1には、作業区間WA内において前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14と、地上側通信装置との間でデータ通信を行う機上側通信装置15が設けられ、前記作業区間WAの一端部には、通過する搬送用走行体1の前記機上側通信装置15に走行可信号を送信する地上側通信装置18a,18bが配設され、この地上側通信装置18a,18bから受信した走行可信号を、作業区間WA内を走行する他の全ての搬送用走行体1に前記データ通信手段13,14を介して伝送し、作業区間WA内の各搬送用走行体1を、受信した走行可信号に基づいて作業速度で自走させる。
(もっと読む)
移動体遠隔操縦システムおよびそのための制御プログラム
【課題】 通信障害領域が存在する環境でも、簡単な構成で移動体を安全に遠隔操縦可能にする。
【解決手段】 移動ロボット遠隔操縦システム100はCPU(80,20,40)およびメモリ(84,22,42)を含み、メモリの保存領域(170,130,150)には地図情報(138)が、一時記憶領域(180,140,160)には地図情報に対応する区域内で無線通信に障害が生じる通信障害領域(IO1〜IO5)を示す情報が仮想障害物情報(148)として記憶される。CPUは、センサ(122,124,40,46,58,70,112a,112b)からの情報に基づいて、地図情報に対応する区域での移動ロボット10の少なくとも位置を検出し(S1,S5)、地図情報および仮想障害物情報と検出結果とに少なくとも基づいて、通信障害領域を回避するように移動体を移動させる移動制御情報(182a)を作成する(S75,S105)。
(もっと読む)
無人車両の走行システムにおける走行制御方法および無人車両の走行システム
【課題】作業現場が施工された後、無人車両を走行させるまでに行なわれる作業現場の詳細な地形データを計測する工程、走行経路を生成する工程を不要とし、作業現場施工後、即座に走行経路に沿って無人車両を走行可能として、無人車両の生産性を向上させるとともに作業現場の運用コストを低減させる。
【解決手段】作業現場の地形データを作成して新たな走行経路の情報を生成する。次に、作成された地形データに基づいて新たな走行経路を含む作業現場を施工する。次に、生成された新たな走行経路の情報を車両に与え、仮の走行制御データに従い当該新たな走行経路に沿って走行させて、新たな走行経路の実際の地形データを取得する。次に、取得された新たな走行経路の実際の地形データに基づいて前記仮の走行制御データを修正する。次に、修正された走行制御データに従い無人車両を走行させる。
(もっと読む)
搬送システム、および、台車割り付け方法
【課題】搬送システムにおいて自走式台車に搭載されるバッテリーの寿命を維持する。
【解決手段】バッテリー115を搭載し荷物を搬送する自走式の台車101と、充電ステーションと、管理手段とを備える搬送システムであって、バッテリー115の放電量を示す情報である放電量情報を作成する放電量作成部116と、バッテリー115に許容される放電量を示す情報である残量情報を放電量情報に基づき作成する残量作成部117と、要求される仕事に含まれる目的地の位置を示す情報である目的地情報と台車101の位置を示す情報である現在地情報とに基づき、要求される仕事に必要な放電量を示す情報である必要量情報を作成する必要量作成部と、残量情報から必要量情報を減じて得られる差が第一閾値を上回る場合、要求される仕事を台車101に割り付ける割付部とを備える。
(もっと読む)
無人搬送車および走行制御方法
【課題】障害物を回避する無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】経路データ上に、回避距離を予め設定しておき、進行方向前方に障害物1701を検知すると、回避距離だけ横行した後、前方へ走行することを特徴とする。また、回避距離は、回避方向と共に経路データにおける区間毎に設定されていてもよい。さらに、回避経路を走行中に取得した計測データに、障害物1701が検出されなくなったときから、車長+所定距離だけ前方に移動した後、元の経路1702に戻る。
(もっと読む)
無人搬送車および走行制御方法
【課題】自車位置の推定精度を向上させる無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】計測データと地図データ132とのマッチングにおいて、不一致箇所が検出されても、その不一致箇所をマッチングの対象から除外するマスクエリア510を、地図データ132において設定することを特徴とする。無人搬送車の位置推定の際には、その不一致箇所を除外した計測データを用いる。マスクエリア510には、無人搬送車の走行エリアにおいて、レーザ距離センサで計測するたびに状況が変わるエリア(例えば、パレット置場や、充電器置場など)が設定されるのが望ましい。
(もっと読む)
搬送車システム
【課題】 搬送車に効率的に充電できるシステムを提供する。
【構成】 蓄電部材を電源として走行する複数台の搬送車を、所定の走行経路に沿って、地上側コントローラの制御下に走行させる。走行経路は搬送車の蓄電部材への充電設備を備えた充電エリアを備え、搬送車は位置と蓄電部材の残容量とを地上側コントローラへ報告する。地上側コントローラは、蓄電部材の残容量が閾値以下の搬送車を充電エリアへ走行させて、蓄電部材に充電させると共に、搬送要求に応じて充電エリア内の搬送車を充電エリア外の位置へ走行させる。
(もっと読む)
ロボット掃除機、並びにロボット掃除機を用いた遠隔監視システム及びロボット掃除機を用いた遠隔監視方法
【課題】掃除又は走行時に作成した掃除地図を提供し、特定の位置又は領域の監視画像を提供するロボット掃除機を備えることにより、掃除地図上の特定の位置又は領域にロボット掃除機を移動させたり、該当領域の掃除を行わせたりするように制御することができ、該当領域の監視画像を提供することにより、遠隔監視効率及びシステムの運用効率を向上させ、ユーザの利便性を向上させることができるロボット掃除機、並びにそれを用いた遠隔監視システム及びその遠隔監視方法を提供する。
【解決手段】ロボット掃除機100は、掃除領域を撮影して監視画像を生成する少なくとも1つの監視カメラ110と、ロボット掃除機100を駆動し、掃除領域を探索して掃除地図を作成する制御ユニット130と、監視画像及び掃除地図を外部装置に送信し、外部装置から制御命令を受信する通信サーバ120と、を有する。
(もっと読む)
物品搬送装置
【課題】低コストの簡易な制御手段であっても制御できるように制御条件を簡素化することができる物品搬送装置を提供すること。
【解決手段】複数台のトラバーサ4a,4b,4cが同一のレール5に沿って走行されるとともに、このレール5の複数箇所に設けられるコンベヤ14〜18にて、各トラバーサ4a,4b,4cにコンテナ2が移載されるようになっており、所定の制御条件に基づいて、トラバーサ4a,4b,4cをコンベヤ14〜18に移動させる制御を行う制御手段が設けられる物品搬送装置1であって、制御条件によって、各コンベヤ14〜18が各トラバーサ4a,4b,4cの配置に対応させて予めグループ化されており、制御手段は、各トラバーサ4a,4b,4cが対応するグループS1〜S3のコンベヤ14〜18に向かう動作を互いに同期させる制御を行う。
(もっと読む)
ロボット自己位置同定システム
【構成】ロボット自己位置同定システム100は、ネットワーク400を介して接続される追跡サーバ10およびロボット18を含む。追跡サーバ10は空間内の実体(E)を追跡し、ロボット18は状態データを出力する。追跡サーバ10は状態データおよび実体(E)の位置データをバッファに記憶する。また、追跡サーバ10はバッファに記憶された複数の位置データおよび複数の状態データに基づいて、ロボット18と実体(E)とを関連付ける。さらに、追跡サーバ10は、ロボット18に関連付けられた実体(E)を利用して、補正データをロボット18に送信する。そして、ロボット18は、追跡サーバ10が送信した補正データに基づいて自身の位置および角度を補正する。
【効果】ロボット18と追跡サーバ10で追跡される実体(E)とを関連付けることができるため、容易にロボット18を自己位置同定することができる。
(もっと読む)
移動体の制御システム
【課題】無線通信装置の受信能力の低下による通信障害の発生を予測できる移動体の制御システムを提供すること。
【解決手段】移動体が、その走行位置を検出する走行位置検出手段と、無線通信装置にて受信する運行情報及び走行位置検出手段にて検出される走行位置情報に基づいて走行作動を制御する走行制御装置とを備えて構成され、運行制御装置が、移動体が無線通信装置にて送信する走行位置情報Pp、及び、無線通信装置が通信中継装置から受信している無線信号の受信強度を示す受信強度情報Prに基づいて取得される移動体の走行位置に対応した受信強度と、当該走行位置についての基準受信強度Ls1・Ls2とを比較して、無線通信装置の受信能力が低下している受信能力低下状態であるか否かを判別する受信能力評価手段を備えて構成されている移動体の制御システム。
(もっと読む)
移動ロボット
【課題】安全性向上のための近接センサを走行制御にも用いて移動ロボットの使い勝手を向上させる。
【解決手段】移動ロボットの本体を移動する移動機構と、複数の方向から移動機構に接近する物体を検知する近接センサと、近接センサの信号により、移動機構を制御する制御部と、を備え、移動ロボットが待機状態にあり、かつ、近接センサが移動ロボットの進行方向と異なる方向の物体を検知したとき、制御部が進行方向に移動機構を移動させる。
(もっと読む)
自律移動システム及び自律移動装置
【課題】自律移動装置が指定された経路から逸れることが無い移動計画を行うことができる自律移動システム及び自律移動装置を提供する。
【解決手段】管理装置は、通信装置37を介して各自律移動装置2a、2bから受信する集約データに基づいて、地図上の位置座標と、自律移動装置2a、2bで推定される自己位置が不確かになる程度を判断する誤差分布データとを対応付けて登録する誤差登録地図を管理する地図管理部310と、この地図管理部310で管理される誤差登録地図310cに基づいて、各自律移動装置2a、2bが経路から逸れることが無い又は逸れる確率を低くする、動作及び/又は経路を指定する移動計画を行う運用管理部320を備える。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】移動体が移動する移動路に沿って等間隔に順に配置される共振タグに専用のアンテナと、このアンテナを介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】隣り合うものの共振周波数が異なるように移動体が移動する移動路に沿って等間隔に順に配置される複数種類の共振タグのそれぞれに専用のアンテナと、このアンテナの各々を介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
1 - 20 / 71
[ Back to top ]