
Fターム[5H303BB07]の内容
位置、方向の制御 (6,897) | 位置決め対象の種類(次元、軸) (1,310) | 駆動軸が2軸であるもの (152)
Fターム[5H303BB07]に分類される特許
1 - 20 / 152
ステージ機構およびその駆動方法
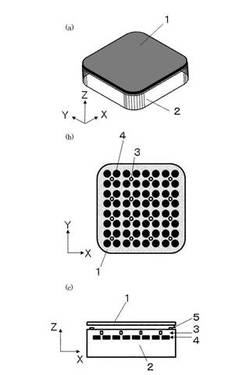
【課題】ステージを搭載する固定ベース表面に組み込んだマイクロヒータアレイで構成されるコンパクトなアクチュエータシステムで、XY方向、ヨー回転方向の3自由度に関する長ストローク駆動、およびZ/ピッチ/ロール方向の微細駆動を実現することができるステージ機構およびその駆動方法を提供する。
【解決手段】ステージ1に接触するベース2の表面近傍に、ベース2の表面の熱変形突出用の第一層目のヒータ3をXY方向にアレイ状に複数配置し、更にベース2の表面から深いところに、第一層目のヒータ3の前後左右を挟み込むように第二層目のヒータ4をXY方向にアレイ状に複数配置する。第二層目のヒータ4が、第一層目のヒータ3による熱変形突出部をXY方向に移動することにより、熱変形突出部に接触するステージ1をXYθ方向に駆動する。
(もっと読む)
ギア加工機の制御装置

【課題】伝達遅れを抑え且つ分岐回路無しで、一つのマスタ軸に対して一つまたは複数のスレーブ軸を同期させる。
【解決手段】ギア加工機の制御装置(1)は、工具軸コントローラ(22)とワーク軸コントローラ(12)との間を直接的に接続して通信するバス(51)を具備し、工具軸位置検出センサ(25)により検出された工具軸(40)の位置はバスを通じてワーク軸コントローラに供給され、上位コントローラ(10)は所定の同期比と、ねじれ動作を加えるための重畳指令とをワーク軸コントローラに供給するようになっており、ワーク軸コントローラは、バスを通じて供給された工具軸の位置に同期比を乗算して作成された値と重畳指令とを加算して、ワーク軸(30)の移動指令を作成するようにした。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】高速且つ高精度に駆動対象を目標位置に停止可能とする。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理(S140,S150)を実行する。また、第二制御処理(S210,S220)では、電流上限値よりも小さい偽の電流上限値を、電流上限値の算出式に用いる係数を切り替えることで算出し、その偽の電流上限値に対応する駆動電流でモータを駆動する。そして、第三制御処理(S300)では、第二制御処理終了時の駆動対象の位置P及び速度Vに基づき、定速区間及び減速区間の目標プロファイルを設定し、駆動対象の位置及び速度が、目標プロファイルが示す位置及び速度を追従するように、モータに対する電流指令値を調整する。これによって第三制御処理の初期に電流指令値が電流上限値を超えないようにモータ制御を実行し、駆動対象を目標位置に停止させる。
(もっと読む)
ステージ移動装置及び無接点充電器
【課題】可及的に安価で、モータ制御が簡単なステージ移動装置を提供する。
【解決手段】ステージ移動装置1を、1個の正・逆回転可能なモータ100と、互いに直角に交差して配置され、交差部分にステージ600を保持するX軸方向キャリッジ400X及びX軸方向キャリッジ400Xと、モータ100の回転力をX軸方向キャリッジ400XをX軸方向に移動させる経路に伝達するか、Y軸方向キャリッジ400YをY軸方向に移動させる経路に伝達するかをステージ600の移動目標に応じて切り替える動力伝達経路切替手段と、モータ100の回転軸の回転運動をX軸方向キャリッジ400Xの直線往復運動又はY軸方向キャリッジ400Yの直線往復運動に変換する運動方向変換手段と、X軸方向キャリッジ案内手段及びY軸方向キャリッジ案内手段と、ステージ600の移動目標に応じてモータ100の回転方向及び回転角度を制御するモータ制御装置とで構成した。
(もっと読む)
同期制御装置
【課題】容易かつ遅れなしにカム曲線の切替が可能な同期制御装置を提供する。
【解決手段】カム曲線記憶部64は、第1のカム曲線および第2のカム曲線を記憶する。制御部66は、カム曲線の切替え前は、各制御タイミングで、第1のカム曲線上の値に基づいて、従動側部材への位置指令値を求め、カム曲線の切替え後は、各制御タイミングで、第2のカム曲線上の値に基づいて位置指令値を求め、カム曲線の切替期間は、各制御タイミングで、第1のカム曲線または従動軸の位置に基づく第1のデータと、第2のカム曲線に基づく第2のデータとを加重平均した値に基づいて従動側部材への位置指令値を求める。
(もっと読む)
一つの被駆動体を二つの電動機で駆動させる制御装置
【課題】二つの電動機間の機動力が互いに干渉することによって生じうる振動を抑制するために、二つのプロセッサで二つの電動機を制御することができる制御装置を提供する。
【解決手段】DSP11aは、取得した回転サーボモータ3aの速度値をDSP11bに送信するとともに回転サーボモータ3bの速度値をDSP11bから受信し、回転サーボモータ3aへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。DSP11bは、取得した回転サーボモータ3bの速度値をDSP11aに送信するとともに回転サーボモータ3aの速度値をDSP11aから受信し、回転サーボモータ3bへのトルク指令に対する補正量を、回転サーボモータ3aの速度値と回転サーボモータ3bの速度値との速度値差に基づいて計算する。
(もっと読む)
トリガ発生装置
【課題】 サーボモータに同期して稼動する外部装置に対して作動を指示するトリガ信号を高精度に出力することが可能なトリガ発生装置を提供する。
【解決手段】 位置検出器のサンプリング開始からトリガ信号を発生させるタイマ設定時間を算出するまでに要する時間をサーボ側遅延時間とし、トリガ発生装置がトリガ信号を出力してから外部装置が作動を開始するまでに要する時間を外部装置側遅延時間とするとき、本発明のトリガ発生装置は、サーボモータの位置情報から算出された外部装置が作動開始位置に到達するまでの到達所要時間からサーボ側遅延時間及び外部装置側遅延時間を減算してタイマ設定時間を算出するタイマ設定時間算出部と、タイマ設定時間に基づきトリガ信号を出力するトリガ信号出力部と、を有する。
(もっと読む)
太陽追尾装置
【課題】出力を簡易に検出できる太陽追尾装置を提供すること。
【解決手段】太陽の方位に対応して回転可能に構成される第1軸7及び太陽の高度に対応して回転可能に構成される第2軸8により、太陽光を受光する受光部9が支持されている。第1軸7は重力軸Gに対して回転軸心Oが傾斜して配置されているので、第1軸7が回転すると、第1軸7に固定された第1傾斜センサ41は重力軸Gと検出軸Dとの角度を変えながら、即ちセンサ出力を変えながら回転軸心Oの回りを回転する。第1軸7の回転角と第1傾斜センサ41のセンサ出力とを対応させることにより、出力を簡易に検出できる。第1軸7に連係して回転される第2軸8や受光部9に第1傾斜センサ41が固定されるときも同様に、出力を簡易に検出できる。
(もっと読む)
位置補正装置およびレーザ加工機
【課題】移動装置の位置決め制御の精度の向上と加工速度の向上とを両立できる位置決め装置およびレーザ加工機を提供すること。
【解決手段】座標平面におけるレーザビームBの加工予定軌跡と目標軌跡との間で距離の最も近い2点の組が探索され、その2点間の各々の距離が算出される。算出された各々の距離に基づいて加工予定軌跡を作るための指令が補正されるので、加工予定軌跡を目標軌跡に近づけることができる。これらの処理は被加工物WにレーザビームBを照射する前に実行されるので、レーザ加工時における移動装置の位置決め速度(移動速度)を低下させることなく移動装置の位置決め制御の精度を向上できる。また、変位にヒステリシスをもつピエゾアクチュエータ等の移動装置であっても、ヒステリシスを考慮した補正ができる。
(もっと読む)
位置決め装置
【課題】位置決め対象物を一台の駆動装置により互いに直交する二方向、例えば、水平方向と垂直方向とのそれぞれに移動させて位置決めすることができる位置決め装置を提供すること。
【解決手段】基台11に設けられたレール12の上にそれぞれ摺動可能に立設された第1のスライド部材21と第2のスライド部材22、但し、第1のスライド部材には、レールとの係合により第1のスライド部材を一時的に固定することのできる第1の仮固定機構31が設けられており、また第2のスライド部材には、斜面22cが設けられている;第1のスライド部材の側面21bと第2のスライド部材の斜面22cとにより摺動可能に係合支持された楔状の位置決め対象物支持部材23、但し、対象物支持部材23には、上記係合支持を一時的に固定することのできる第2の仮固定機構32が設けられている;そして、第2のスライド部材のレール上での摺動を駆動する駆動部材41を含む位置決め装置。
(もっと読む)
マルチステージシステム、マルチステージシステムのための制御方法、およびリソグラフィ装置
【課題】2つのステージが互いに近づくことができるマルチステージシステムを提供することが望ましい。
【解決手段】マルチステージシステムを制御する方法であって、マルチステージシステムは、第1方向と平行に延びるステータと、ステータに対して移動可能な第1および第2ステージと、を備える。それらのステージは、磁場を生成するマグネットシステムを備える。ステータは複数のコイルを備え、複数のコイルは磁場と相互作用し、ステージをステータに対して位置決めする。本方法は、それらのステージの位置を決定することと、第1ステージ、第2ステージそれぞれの磁場と無視できない相互作用を有する可能性のあるコイルの第1および第2サブセットを選択することと、両方のサブセットの電気コイルを駆動することと、を含む。コイルを駆動することは、両方のサブセットの一部となっているコイルを決定することと、両方のサブセットの一部であるコイルを駆動対象から除くことと、を含む。
(もっと読む)
位置制御装置の制御パラメータ調整方法及び制御パラメータ調整システム
【課題】複数の駆動系が駆動時に互いに摩擦力を及ぼし合う関係にある位置制御装置の制御パラメータを調整する作業を簡単化する。
【解決手段】位置制御装置28により2つの駆動系のモータ16,24を同時に駆動して各駆動系の位置決めデータを採取し、遺伝的アルゴリズムを用いて各駆動系の位置決めデータの特徴量を評価して、その評価値が要求性能(設計仕様)を満足するように位置制御装置28の制御パラメータを調整する。この際、各駆動系の位置決めデータとして、位置指令波形、実位置波形及びトルク波形を採取し、各駆動系の位置決めデータの特徴量として位置決め波形を評価するようにすると良い。また、調整対象となる制御パラメータは、例えば、位置指令パラメータ、フィードバックゲインパラメータ及びフィードフォワードゲインパラメータである。
(もっと読む)
制御装置および制御方法、並びにプログラム
【課題】新たなハードウェアを必要とせず、タクトタイムを変化させることなく、振動を抑制する。
【解決手段】パラメータ生成部102は、基準距離について、予め定めた移動時間毎に、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを生成する。データベース103は、パラメータ生成部102から供給されたパラメータを記憶する。パラメータ決定部104は、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを決定する。軌道計算部105は、決定されたパラメータから軌道を計算する。本発明は、ロボットを制御する制御装置に適用できる。
(もっと読む)
軌跡制御装置
【課題】加減速の影響により送り速度が過渡的に変化するような場合でも軌跡誤差を抑制できる軌跡制御装置を得ること。
【解決手段】軌跡制御装置は、機械の可動部が複数の可動軸により駆動され、前記複数の可動軸を同時制御することにより前記可動部の軌跡を制御する軌跡制御装置であって、与えられた指令経路に対して補間・加減速を行う補間・加減速演算部と、前記補間・加減速された指令経路に応じて、前記複数の可動軸の位置指令を生成する軸分配部と、前記複数の可動軸の位置指令と前記補間・加減速された指令経路とに基づいて、軌跡誤差を補正するための補正ベクトルを演算する補正ベクトル演算部と、前記演算された補正ベクトルを用いて前記複数の可動軸の位置指令を補正する位置指令補正部と、前記複数の可動軸の位置が前記補正された複数の可動軸の位置指令に追従するように、前記複数の可動軸を同時制御するサーボ制御部とを備えている。
(もっと読む)
指令生成装置
【課題】目標位置が変更された場合であっても、可動軸に発生する衝撃や励起する振動を可及的に抑制しながら前記変更された目標位置までの補間動作を実行すること。
【解決手段】目標位置Xと可動軸の現在位置Cとの間を補間するように速度指令計算値vrを可動軸毎に算出する指令速度演算部と、直前に出力された速度指令出力値voと速度指令計算値vrとの差分である速度変更量Δvを可動軸毎に算出する速度変更量演算部と、可動軸毎の速度変更量Δvの全てが許容速度変更量Vmを越えない値となるように速度変更量Δvを制限する1つの補正ゲインRを算出する補正ゲイン演算部と、速度変更量Δvを補正ゲインRで制限した値と直前に出力された速度指令出力値voとを加算して次に出力する速度指令出力値voを可動軸毎に算出する指令速度出力部を備える。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及びパターン形成装置、露光方法及び露光装置、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 ウエハステージWSTの位置情報は、ウエハX干渉計18X1,18X2、ウエハY干渉計18Y等と、該干渉計に比べて計測値の短期安定性が優れるエンコーダ50A,50B等とを用いて計測される。エンコーダ50A,50B等は、計測値の短期安定性が良好であるので、ウエハステージWSTの2位置情報が精度良く計測される。ウエハステージWSTは、エンコーダ50A,50B等の計測範囲内では、それらの計測結果に基づいて精度良く駆動される。
(もっと読む)
モータ制御装置
【課題】動作中に振動特性が変化する制御対象に対する振動抑制制御の精度を向上できるモータ制御装置を得ること。
【解決手段】モータ1a及び振動可能要素1bを有する制御対象1の動作を制御して、制御対象の動作を動作目標値に追従するようにモデルトルクτaを生成するフィードフォワード制御部111と、モデルトルクに応じてトルク指令τMを発生させる発生部とを備え、フィードフォワード制御部は、制御対象の振動関連情報に応じて、振動特性を表す振動パラメータθを生成する生成部と、振動パラメータに応じて、動特性を模擬した数式モデル121を変更し、モデルトルクから変更された数式モデルにより、制御対象の動作状態を含むモデル変数を演算する第1の演算部と、モデル変数が一定の追従特性で動作目標値に追従するように、振動パラメータに応じて特性を変化させた演算によりモデルトルクを演算する第2の演算部とを有する。
(もっと読む)
電磁アクチュエータ、ステージ装置およびリソグラフィ装置
【課題】改良された電磁アクチュエータを実現する。
【解決手段】電磁アクチュエータが、互いに移動可能であり磁気回路を形成するように配置されている第1の磁性部材および第2の磁性部材と、使用時に電流を受け取って磁気回路を通る磁束を発生し、それによって第1の磁性部材と第2の磁性部材の間で第1の方向に力を発生するように構成されたコイルとを含み、磁束は、使用時に第1の磁性部材と第2の磁性部材の間で、第1の磁性部材の第1の面および第2の磁性部材の第2の面を通して伝達され、第1の面と第2の面がエアギャップによって分離され、第1の面および第2の面は互いに、第1の面の外形寸法が第2の面の外形寸法を越えて、第1の方向にほぼ垂直の第2の方向に延びるように配置される。
(もっと読む)
ピッチ駆動装置
【課題】ピッチ駆動による装着ヘッド等の可動体の振動を低減する機能を、ピッチ駆動の高速化とコントローラの演算負荷軽減の要求を満たしながら実現する。
【解決手段】部品実装機の装着ヘッド22に、複数本の吸着ノズル21を所定ピッチで配列し、部品吸着動作時や部品実装動作時に、装着ヘッド22を回転方向に吸着ノズル21の配列ピッチ分だけピッチ駆動する。ピッチ駆動の速度指令プロファイルとして、速度上昇を性能限界より低い速度で制限した台形波状の速度指令プロファイルを用いて装着ヘッド22をピッチ駆動することで、ピッチ駆動による装着ヘッド22のX軸方向の振動エネルギを減衰させる。振動エネルギを減衰させる周波数帯は、台形波状の速度指令プロファイルの最高速度指令によって変化させることができ、減衰させる周波数が装着ヘッド22の支持部分の固有振動数と一致するように最高速度指令を設定すれば良い。
(もっと読む)
位置決め装置及び位置決め方法
【課題】高精度かつ高速に位置決めすることが可能な位置決め装置を提供すること。
【解決手段】本実施形態に係る位置決め装置は、撮像器3による撮像画像データに基づいて追跡誤差信号を算出する画像処理部40と、追跡誤差信号及び粗動機構のセンサ信号に基づく粗動機構制御信号により粗動機構1を制御する粗動機構制御駆動部10と、追跡誤差信号及び微動機構のセンサ信号に基づく微動機構制御信号により微動機構を制御する微動機構制御駆動部20と、粗動機構1の駆動力又は駆動トルクと、粗動機構1のセンサ信号と、機構パラメータ記憶部に記憶された機構パラメータとから、機構の運動方程式に基づいて粗動機構の動作により発生する撮像器の撮像画面内の加速度を算出し、粗動微動機構部の目標物に対する追跡誤差を低減させるために微動機構制御信号へ加算する微動機構追跡補正信号を加速度に応じて生成する補正信号生成部30とを具備する。
(もっと読む)
1 - 20 / 152
[ Back to top ]