
Fターム[5H303CC04]の内容
Fターム[5H303CC04]の下位に属するFターム
オーバーシュート、オーバーランの防止 (36)
Fターム[5H303CC04]に分類される特許
1 - 20 / 71
モータ制御装置
位置制御装置
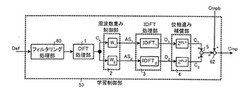
【課題】繰返し学習制御部を持つ位置制御装置において、位置偏差に多様な高調波成分が含まれる場合にも、繰返し学習制御によって、位置偏差の高い減衰性と、迅速な収束性を達成する繰返し学習制御機能を持つ位置制御装置を提供する。
【解決手段】位置偏差を離散フーリエ変換して得られたフーリエ係数ベクトルに、複数の周波数重み係数を乗じることで、周波数帯域別に成分分割し、成分毎に離散フーリエ逆変換した信号データに、最適な位相進み補償を与え加算することで、学習時の補正値データを構成する。
(もっと読む)
制御指令値生成プログラム、制御指令値生成方法および制御指令値生成装置

【課題】 一の入力指令値から複数の制御指令値を高精度かつ安定的に生成するとともにその際の演算負荷を低減することができる制御指令値生成プログラム、制御指令値生成方法および制御指令値生成装置を提供する。
【解決手段】 コンピュータを、所定の入力指令値から当該入力指令値のn階までの微分(n≧0)で表せるn+1個の制御指令値を、入力数が1であり出力数がn+1である状態方程式を用いて生成するn次のデジタルフィルタとして機能させる。
(もっと読む)
サーボドライブシステム
【課題】 サーボ制御の制御応答性を高め、制御装置の各軸の特性に応じて、制御演算部をサーボアンプ又はサーボコントローラに分配可能なサーボドライブシステムを提供する。
【解決手段】 本発明のサーボドライブシステムは、軸毎にサーボモータを制御するサーボ制御部が、サーボモータの指令を生成するプロファイル生成部と、サーボモータの位置を制御する位置制御部と、サーボモータの速度を制御する速度制御部と、サーボモータのモータ電流を制御する電流制御部と、を有し、プロファイル生成部、位置制御部、速度制御部及び電流制御部は、軸毎にサーボアンプ又はサーボコントローラにそれぞれ分配されている。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】停止精度の向上、停止までの所要時間の短縮化及び所要時間のばらつきの低減を、バランス良く実現可能な新しいモータ制御技術を提供する。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理を実行すると共に(S180)、標準プロファイルに基づく第二制御処理によって駆動対象を減速・停止させるのに必要な搬送量である停止必要量Pnを算出する(S150)。標準プロファイルは、駆動対象10の駆動開始時点から停止時点までの時間が一定で、減速時の加速度ピークが、モータで実現可能な限界値−Apに設定された目標プロファイルである。そして、目標停止位置までの残り搬送量Psが停止必要量Pn以下となった時点で(S170でYes)、第一制御処理に代えて第二制御処理を実行し(S200)、駆動対象を精度よく目標停止位置で停止させる。
(もっと読む)
位置補正装置およびレーザ加工機
【課題】移動装置の位置決め制御の精度の向上と加工速度の向上とを両立できる位置決め装置およびレーザ加工機を提供すること。
【解決手段】座標平面におけるレーザビームBの加工予定軌跡と目標軌跡との間で距離の最も近い2点の組が探索され、その2点間の各々の距離が算出される。算出された各々の距離に基づいて加工予定軌跡を作るための指令が補正されるので、加工予定軌跡を目標軌跡に近づけることができる。これらの処理は被加工物WにレーザビームBを照射する前に実行されるので、レーザ加工時における移動装置の位置決め速度(移動速度)を低下させることなく移動装置の位置決め制御の精度を向上できる。また、変位にヒステリシスをもつピエゾアクチュエータ等の移動装置であっても、ヒステリシスを考慮した補正ができる。
(もっと読む)
位置決め制御装置、これを備えた工作機械
【課題】送り装置の加速性能を損なうことなく、位置決め精度を高めることができ、従来に増して高精度な位置決めを行うことができる位置決め制御装置、工作機械を提供する。
【解決手段】移動体と、移動体を送り軸方向に案内する案内機構部及び移動体を移動させる駆動機構部を有する送り装置と、送り装置を支持する構造体2と、駆動機構部の作動を制御して、工作機械上の基準位置に対する移動体の移動位置を制御する制御装置20とを備え、更に、前記構造体の変位に起因した前記基準位置に対する前記送り装置の前記送り軸方向における変位を導出する導出部11,28と、導出部11,28により測定された変位データを受信して、この変位を打ち消すための修正データを、制御装置20における制御信号に加算する加算部27とを備える。
(もっと読む)
指令生成装置
【課題】目標位置が変更された場合であっても、可動軸に発生する衝撃や励起する振動を可及的に抑制しながら前記変更された目標位置までの補間動作を実行すること。
【解決手段】目標位置Xと可動軸の現在位置Cとの間を補間するように速度指令計算値vrを可動軸毎に算出する指令速度演算部と、直前に出力された速度指令出力値voと速度指令計算値vrとの差分である速度変更量Δvを可動軸毎に算出する速度変更量演算部と、可動軸毎の速度変更量Δvの全てが許容速度変更量Vmを越えない値となるように速度変更量Δvを制限する1つの補正ゲインRを算出する補正ゲイン演算部と、速度変更量Δvを補正ゲインRで制限した値と直前に出力された速度指令出力値voとを加算して次に出力する速度指令出力値voを可動軸毎に算出する指令速度出力部を備える。
(もっと読む)
演算ユニット、出力制御方法、およびプログラム
【課題】カムテーブルの切り換えを迅速に行なうことが可能なPLCの演算ユニットを提供する。
【解決手段】PLCのCPUユニットは、モーション制御とシーケンス制御とを実行する。CPUユニットは、カムテーブルを用いたモーション制御を行なうための制御プログラムと、第1のカムテーブルおよび第2のカムテーブルとを格納している。マイクロプロセッサは、制御プログラムの実行中に予め定められた指示を受け付けると、制御プログラムの実行に用いるカムテーブルを第1のカムテーブルから第2のカムテーブルに切り換える。マイクロプロセッサは、カムテーブルの切り換えに基づき、第2のカムテーブルを用いた制御プログラムの実行結果を制御対象機器に出力する。
(もっと読む)
電磁アクチュエータ、ステージ装置およびリソグラフィ装置
【課題】改良された電磁アクチュエータを実現する。
【解決手段】電磁アクチュエータが、互いに移動可能であり磁気回路を形成するように配置されている第1の磁性部材および第2の磁性部材と、使用時に電流を受け取って磁気回路を通る磁束を発生し、それによって第1の磁性部材と第2の磁性部材の間で第1の方向に力を発生するように構成されたコイルとを含み、磁束は、使用時に第1の磁性部材と第2の磁性部材の間で、第1の磁性部材の第1の面および第2の磁性部材の第2の面を通して伝達され、第1の面と第2の面がエアギャップによって分離され、第1の面および第2の面は互いに、第1の面の外形寸法が第2の面の外形寸法を越えて、第1の方向にほぼ垂直の第2の方向に延びるように配置される。
(もっと読む)
ピッチ駆動装置
【課題】ピッチ駆動による装着ヘッド等の可動体の振動を低減する機能を、ピッチ駆動の高速化とコントローラの演算負荷軽減の要求を満たしながら実現する。
【解決手段】部品実装機の装着ヘッド22に、複数本の吸着ノズル21を所定ピッチで配列し、部品吸着動作時や部品実装動作時に、装着ヘッド22を回転方向に吸着ノズル21の配列ピッチ分だけピッチ駆動する。ピッチ駆動の速度指令プロファイルとして、速度上昇を性能限界より低い速度で制限した台形波状の速度指令プロファイルを用いて装着ヘッド22をピッチ駆動することで、ピッチ駆動による装着ヘッド22のX軸方向の振動エネルギを減衰させる。振動エネルギを減衰させる周波数帯は、台形波状の速度指令プロファイルの最高速度指令によって変化させることができ、減衰させる周波数が装着ヘッド22の支持部分の固有振動数と一致するように最高速度指令を設定すれば良い。
(もっと読む)
制御装置、及び制御方法
【課題】位置フィードバック機構を用いたモータの制御において、整定時間を短縮することができる制御装置を提供する。
【解決手段】制御装置は、外部より一定間隔ごとに入力される位置指令値から位置指令値の変化量を算出し、算出した変化量に基づいて、モータにおいて生じる位置指令値に対する動作の遅れを補正する補正値を算出する位置指令補正部と、補正値により位置指令値を補正した補正位置指令値に応じた電力をモータに供給する駆動部とを具備する。
(もっと読む)
自動ドア駆動制御装置
【課題】本発明は、特定の速度域において最適となるように調整された制御ゲインがその速度域以外では最適な制御ゲインとならないことに起因する速度の不安定性を解消でき、制御の応答性を向上できる自動ドア駆動制御装置を提供することを課題とする。
【解決手段】本発明による自動ドア駆動制御装置では、フィードバック速度制御部32は、自動ドアのドア体を開閉するモータ10への入力電圧20aを、速度指令43aと検出開閉速度60aとに基づいて制御することで、ドア体の開閉速度制御を行う。ゲイン変更部33は、ドア体の現在位置42aに応じてゲイン変更指令33aをフィードバック速度制御部32に入力して、フィードバック速度制御部32の開閉速度制御の制御ゲインを変更する。
(もっと読む)
フルクローズド位置制御装置
【課題】 数値制御機械のフルクローズド位置制御装置において、対象プラントの条件に関わらず、プラント変動に応じて、システムの安定性(振動抑制性を含む)と、高い指令追従性能及び負荷外乱抑制性能が両立するフルクローズド位置制御装置を提供する。
【解決手段】 フルクローズド位置制御装置は、位置指令値の時間微分である速度指令値と、位置指令値と対象プラントの負荷位置との位置偏差を増幅する位置偏差増幅器の出力と、を加算した結果から、対象プラントの負荷速度を減算して速度偏差を算出する加減算器3と、速度指令値と撓み速度補償値との加算値である速度補償値をモータ速度から減算する減算器2と、速度偏差と減算器の出力とを入力として、対象プラントへの制御入力を求めて出力する速度制御器1(Kr)と、を備える。
(もっと読む)
情報処理装置、位置制御方法、プログラムおよび記録媒体
【課題】 ポインティング・デバイスを用いて、顕微鏡システムにおけるステージなどの操作対象を位置制御する情報処理装置、位置制御方法、プログラムおよび記録媒体を提供すること。
【解決手段】 本発明の情報処理装置110は、ポインティング・デバイス114により指し示される操作画面上の座標値を取得する手段172と、この座標値から操作対象の位置の目標値を算出する手段174と、操作対象の位置の目標値と現在値との差分を算出する手段176と、座標値の取得時間間隔内に操作対象を差分だけ移動させるために必要な速度から、予め設定された平滑化係数に応じて減速した値として、操作対象を駆動する同期モータのパルススピードの目標値を算出する手段180と、差分が有り、かつ、順方向の駆動信号が出力されている場合に、算出されたパルススピードの目標値を設定し、このパルススピードの目標値に向けた加減速制御を指令する手段184とを含む。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供。
【解決手段】位置指令生成手段と位置指令フィルタ手段と速度フィードフォワード手段と位置制御手段と速度制御手段と速度制御時指令位置算出手段と位置/速度制御切替手段と指令位置切替手段とを備え、前記速度制御時指令位置算出手段においてモータ駆動装置から前記上位コントローラへの伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置に加算して前期速度制御時指令位置とし、速度制御から位置制御への切替時において前回の前記速度制御時速度指令から算出される位置偏差量を位置偏差の初期値とするとともに、前記位置指令生成手段において前記位置偏差量を現在位置に加算したものを位置制御時指令位置の初期値として設定した後、前記目標位置指令による位置制御を行う。
(もっと読む)
位置制御装置
【課題】速度制御系をマイナーループに、位置制御をメジャーループに持つ位置制御では、高応答にするための調整が困難となっている。
【解決手段】位置制御部にフィードフォワード部を設ける。位置制御部に入力されるステップ状の角度指令θrefと制御対象物の角度検出θdetから比の伝達関数を次式で求める。
θdet/θref={KIω(FFθ+KPθ)}/{Jdys3+(KPω+Ddy)
s2+KIωs+(KIω*KPθ)}
フィードフォワード部のパラメータFFθを、上式の分子多項式の零点=分母多項式の定数項としてKIω(FFθ+KPθ)=KIω*KPθからFFθ=0
として求める。
(ただし、KPθは位置制御部の比例パラメータ、KPω,KIωは速度制御部の比例及び積分パラメータ、Jdyはモータ慣性、Ddyは回転損失s)
(もっと読む)
位置決め装置
【課題】高速かつ高精度に位置決めすることが可能な位置決め装置を提供する。
【解決手段】位置決め装置は、粗動機構1と、粗動機構1より単位変位量が小さい微動機構2と、粗動機構1の位置、角度、速度、角速度等に関するセンサ信号に基づく粗動機構制御信号により粗動機構1を制御する粗動機構制御部10と、微動機構2の位置、角度、速度、角速度等に関するセンサ信号に基づく微動機構制御信号により制御する微動機構制御部20と、粗動機構1及び微動機構2に関するパラメータを記憶する記憶部と、粗動制御信号及び粗動機構のセンサ信号と、記憶部に記憶された粗動機構及び微動機構に関するパラメータとから、粗動機構1の動作により発生する微動機構2の位置決め誤差を算出し、誤差を相殺させるための外乱相殺信号を生成して微動制御信号に加算する外乱相殺信号生成部30とを具備する。
(もっと読む)
露光装置及び露光方法、並びにそれを用いたデバイスの製造方法
【課題】ウエハステージの駆動方向によって発生する微小振動を適切に処理し、1つのウエハ内の露光精度を均一に保つ露光装置及び露光方法を提供する。
【解決手段】原版を保持する原版ステージと、基板を保持、及び移動可能とする基板ステージと、原版のパターンを基板に投影する投影光学系と、基板ステージの位置を計測する位置計測手段と、該位置計測手段の計測値に基づいて、基板ステージの駆動を制御する制御手段と、を有し、ステップ・アンド・リピート方式によって原版のパターンを基板に露光する露光装置であって、制御手段は、基板ステージが、基板を位置決めするために露光位置に向けて駆動する際、予め測定した、基板ステージの駆動方向による、目標位置、倍率、若しくは回転のうち、少なくとも1つのずれ量に基づいて、基板ステージの駆動位置の補正を実施する(S103〜S107)。
(もっと読む)
モーションコントロール装置
【課題】 システムの固有振動角周波数をωnとした場合、指令の払い出し時間がπ/ωn以下、且つ、振動を励起しない指令を容易に生成でき、更に、機械を高速に位置決めすることができる指令を生成するモーションコントロール装置を提供する。
【解決手段】 任意の第1の時間幅と正規化された振幅とを有する第1の基本波形p1と、任意の第2の時間幅と正規化された振幅とを有する第2の基本波形p2と、を発生する波形発生器1,2と、前記第1の基本波形の振幅に第1の所定ゲインA1を乗じて出力し、前記第2の基本波形の振幅に第2の所定ゲインA2を乗じて出力する振幅調整器3,4と、前記第2の所定ゲインを乗じた信号に所定遅延時間を加えて出力する遅延器6と、前記第1の所定ゲインを乗じた信号から前記遅延器の出力信号を減算する減算器5と、を備える。
(もっと読む)
1 - 20 / 71
[ Back to top ]