
Fターム[5H303DD27]の内容
位置、方向の制御 (6,897) | アクチュエータ、伝動手段、機械要素 (843) | 歯車 (25)
Fターム[5H303DD27]に分類される特許
1 - 20 / 25
太陽追尾装置
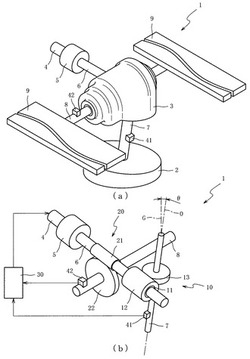
【課題】出力を簡易に検出できる太陽追尾装置を提供すること。
【解決手段】太陽の方位に対応して回転可能に構成される第1軸7及び太陽の高度に対応して回転可能に構成される第2軸8により、太陽光を受光する受光部9が支持されている。第1軸7は重力軸Gに対して回転軸心Oが傾斜して配置されているので、第1軸7が回転すると、第1軸7に固定された第1傾斜センサ41は重力軸Gと検出軸Dとの角度を変えながら、即ちセンサ出力を変えながら回転軸心Oの回りを回転する。第1軸7の回転角と第1傾斜センサ41のセンサ出力とを対応させることにより、出力を簡易に検出できる。第1軸7に連係して回転される第2軸8や受光部9に第1傾斜センサ41が固定されるときも同様に、出力を簡易に検出できる。
(もっと読む)
同期制御装置、同期制御方法、同期制御プログラム、および同期制御プログラムを記録したコンピュータ読み取り可能な記録媒体

【課題】従動軸に加わる衝撃を緩和し、かつ同期開始位置で確実に同期制御を開始することができる同期制御装置、同期制御方法、同期制御プログラム、および同期制御プログラムを記録したコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】ユーザ指令部62は、主軸と従動軸とが同期を開始する同期開始位置を指定する。カム曲線作成部64は、カム曲線を作成する。検出部65は、毎制御周期ごとの主軸の位置情報を検出する。制御部66は、同期開始位置までは、カム曲線と主軸の位置情報とに基づいて、制御周期ごとに従動軸に対する速度指令値を算出し、同期開始位置以降は、主軸と従動軸とのギア比に基づいて、制御周期ごとに従動軸に対する速度指令値を算出し、算出した速度指令値で従動軸を制御する。
(もっと読む)
位置制御装置の制御パラメータ調整方法及び制御パラメータ調整システム
【課題】複数の駆動系が駆動時に互いに摩擦力を及ぼし合う関係にある位置制御装置の制御パラメータを調整する作業を簡単化する。
【解決手段】位置制御装置28により2つの駆動系のモータ16,24を同時に駆動して各駆動系の位置決めデータを採取し、遺伝的アルゴリズムを用いて各駆動系の位置決めデータの特徴量を評価して、その評価値が要求性能(設計仕様)を満足するように位置制御装置28の制御パラメータを調整する。この際、各駆動系の位置決めデータとして、位置指令波形、実位置波形及びトルク波形を採取し、各駆動系の位置決めデータの特徴量として位置決め波形を評価するようにすると良い。また、調整対象となる制御パラメータは、例えば、位置指令パラメータ、フィードバックゲインパラメータ及びフィードフォワードゲインパラメータである。
(もっと読む)
波動歯車装置を備えたアクチュエータの位置決め装置
【課題】スライディングモード制御により波動歯車装置の非線形特性を補償するアクチュエータの位置決め装置を提案すること。
【解決手段】位置決め装置のスライディングモード制御器は、位置指令θl*、制御対象を表す状態変数xを入力として制御対象への制御入力uを生成する。制御対象は次式で規定する。
スライディングモード制御系の切換面は設計変数Sで規定する。
制御入力uは、σを切換関数、kを切換ゲイン、として、線形状態フィードバック制御項ulと非線形制御入力項unlの和である。 (もっと読む)
(もっと読む)
波動歯車減速機の温度変化に伴う摩擦特性変動を考慮したアクチュエータの適応型摩擦補償法
【課題】温度センサを用いずに温度変化に伴う波動歯車減速機の摩擦特性変動下における制御性能の向上を達成可能なアクチュエータの適用型摩擦補償方法を提案すること。
【解決手段】波動歯車減速機1を備えたアクチュエータ2の適応型摩擦補償法では、モータ駆動電流に印加する摩擦補償電流として、モータ軸6が偏差を持って静止した際には静止摩擦補償電流isを採用し、それ以外の場合にはクーロン摩擦補償電流icを採用する。静止摩擦補償電流isはステップ関数の補償量issに単調増加なランプ関数の補償量isrを加えたものであり、クーロン摩擦補償電流icとしてステップ関数の補償量icsを用いる。位置決め制御の応答中のデータに基づき摩擦補償量を適応的に変化させることができるので、周囲温度が変化して波動歯車減速機1の摩擦特性が変動しても、モータ軸6を大きな振動を伴うことなく目標角度に整定可能である。
(もっと読む)
アライメントステージ及び処理装置
【課題】駆動効率及び動作速度を確保できるとともにコンパクトに構成でき、しかも、製造コストを低減することのできるアライメントステージ及び処理装置を提供する。
【解決手段】本発明のアライメントステージ10は、第1の回転駆動手段と、第2の回転駆動手段と、第1の回転軸線11xを中心に回転可能に軸支されるとともに第1の回転駆動手段により回転駆動される第1の回転体11と、第1の回転体に対して第1の回転軸線と平行な第2の回転軸線12xを中心に回転可能に軸支されるとともに第2の回転駆動手段により回転駆動される第2の回転体12と、第2の回転体と一体に構成され、或いは、第2の回転体に固定若しくは連結された移動ステージ13と、を具備し、第2の回転駆動手段は、第1の回転軸線を中心に回転する第2の回転駆動軸4と、第2の回転駆動軸と第2の回転体との間に接続された第2の回転伝達機構9と、を有することを特徴とする。
(もっと読む)
太陽発電装置
【課題】 平面に略沿った受光面を有する複数の太陽電池パネル全ての受光面を、太陽の移動に追従し太陽光の照射方向に略垂直に向けることができる簡単な構造の太陽発電装置を提供する。
【解決手段】複数の太陽電池パネルを第1直線に略平行なパネル回動軸を中心に受光面が互いに略平行な状態を保ちつつそれぞれ回動可能に支持するパネル支持手段と、パネル支持手段を固定物に対し、第1直線と交わる第2直線に略平行な支持手段回動軸を中心に回動可能に支持する回動支持手段と、複数の太陽電池パネルをパネル回動軸を中心に連動して回動させるパネル回動手段と、パネル支持手段を支持手段回動軸を中心に回動させる支持手段回動手段と、を備えてなり、支持手段回動手段によるパネル支持手段の回動と、パネル回動手段による複数の太陽電池パネルの回動と、の両回動のみにより、太陽の移動に追従し、複数の太陽電池パネル全ての受光面を太陽光の照射方向に略垂直に向けるものである、太陽発電装置である。
(もっと読む)
駆動装置、駆動方法、及び装置
【課題】制御対象などの停止位置精度を向上させる。
【解決手段】駆動装置(1A)は、回転駆動する駆動部(10)と、駆動部(10)の駆動出力軸の回転角度位置を検出し第1の位置情報を生成する第1の位置検出器(30)と、駆動部(10)の駆動出力軸に接続された減速機(20)と、減速機(20)の減速出力軸の回転角度位置を検出し第2の位置情報を生成する第2の位置検出器(40)と、駆動部(10)を制御する制御部(500A)と、を含んで構成される駆動装置(1A)であって、第1の位置検出器(30)と第2の位置検出器(40)と制御部(500A)との間において第1の位置情報と前記第2の位置情報とを伝達する伝送路(200A)を備え、制御部(500A)は、位置要求信号に対して互いに同期して検出させた第1の位置情報と記第2の位置情報とのうち少なくとも一方を用いて駆動部(10)を制御する。
(もっと読む)
位置決め制御装置
【課題】減速機構軸の減速後軸の回転角度を検出する必要がある場合、角度検出器の選定は減速機構の構造、被回転体により左右される。その結果角度検出器の大型化、重量化により位置決め装置全体が高額となる。
【解決手段】減速機構2の減速前軸4の角度より減速後軸3の角度を推定計算するようにすることで、減速機構2、被回転体の構造に左右されずに角度検出器7を選定できるようになり、位置決め装置全体の軽量化、低価格化を実現することができる。
(もっと読む)
平面的拡張が容易な軽量薄型の太陽光集光器
【課題】太陽光集光器を大規模化する為に、各部材の応力と曲げモーメントを低減化する。太陽光集光器は小さな基礎モデルで成り立つ構成でも、大規模化すると構成部材の強度に支障が生じがちである。
【解決手段】反射板重量負荷を支える支持点を反射板列の中心線近傍に複数設ける事によって、各構成部材にかかる重量負荷を分散化させる事を、解決手段とする。主な構成物である反射板1を支えるには、反射板1の中心点で支持するのが最適である。さらに支持点が増えれば増えるほど太陽光集光器全体の重量は分散されるので、大規模化しても重量負荷がかさむことがない。
(もっと読む)
周期的な往復動作を制御するサーボモータ制御装置
【課題】周期的に往復動作を行う被駆動体についての角度同期方式の学習制御を可能にするサーボモータ制御装置を提供する。
【解決手段】学習制御器12は、被駆動体14の第1の位置偏差ε1を所定のサンプリング周期毎に取得し、第1の位置偏差ε1は第1変換部30において、周期的な往復動作を行う被駆動体14の1周期分の基準位置毎の第2の位置偏差ε2に変換される。第2の位置偏差ε2は、メモリ32に記憶された被駆動体14の往復動作の1周期前の第1の補正量が加算された後、新たな第1の補正量δ1としてメモリ32に記憶される。第1の補正量δ1は第2変換部34において、サンプリング周期毎の第2の補正量δ2に変換される。
(もっと読む)
波動歯車装置の角度伝達誤差補償方法
【課題】波動歯車装置の角度伝達誤差であるモータ軸同期成分の補償を、波動歯車装置に取り付けられたモータを制御することにより行って、位置決め精度の向上と共に、位置決め応答中の動的なモータ軸同期成分が原因で発生する振動を抑制できるようにすること。
【解決手段】モータ軸位置に基づき負荷軸位置をセミクローズドループ制御により行う波動歯車装置を備えたアクチュエータ(PLANT)における角度伝達誤差補償方法において、モータ位置に同期して発生する相対回転同期成分θSyncを振動源に見立て、当該相対回転同期成分θSyncが負荷位置に与える影響を補償できるように算出した補償電流指令icompによりモータ電流指令irefを補正すると共に、相対回転同期成分の影響を補償するために算出したモータ位置補正信号θcompによりモータ位置指令rを補正する。
(もっと読む)
ロボット制御装置
【課題】摩擦補償を適切に行うことでロボットの実際の動作軌跡をより理論に近づける。
【解決手段】ロボット制御装置3は、モータ軸側ギアと出力軸側ギアとが停止しており且つ弾性変形量がゼロである状態から出力軸を目標駆動方向に駆動させる場合に、モータ軸側ギアに印加する目標駆動方向への摩擦補償用トルクを徐々に増加させ、弾性変形量が最大弾性変形量に到達した以後では弾性変形量が最大弾性変形量に到達した時点での摩擦補償用トルクを一定値として印加する。
(もっと読む)
位置決め装置及び位置決め方法
【課題】被駆動体の電源遮断後における再起動時に位置の特定を必要とする最終出力端の現在位置を特定可能な位置決め装置及び位置決め方法を提供する。
【解決手段】被駆動体を減速機を介して駆動するモータ10と、減速機の被駆動体側出力軸に取り付けられ出力軸の回転位置を検出するアブソリュート型エンコーダ12と、モータの回転位置をパルスを介して検出するモータ側エンコーダ11と、電源投入によりモータを原点方向に動作させ、モータ側エンコーダの基準エンコーダパルスを出力させるパルス出力手段と、基準エンコーダパルスの位置におけるアブソリュート型エンコーダの現在値を読み取る現在値読み取り手段と、読み取った現在値と予め決められたモータの回転原点位置とからモータ回転数を演算するモータ回転数演算手段と、演算結果に基づき被駆動体の位置を検出する被駆動体位置検出手段とを備えている。
(もっと読む)
2軸同期駆動制御装置およびこの装置を用いたサーボプレスおよびダイクッション装置
【課題】2軸駆動制御の同期性を向上する。
【解決手段】第1、第2のサーボ駆動制御系40,50を、信号X、Yを加減算してフィードバック信号Xf、Yfを生成可能かつ指令信号S1(“2S”)、S2(“0”)からフィードバック信号Xf、Yfを減算して前段偏差E1f、E2fを求め、さらに前段偏差E1fをサーボ駆動制御系50に同期調整入力可能でかつ前段偏差E2fをサーボ駆動制御系40に同期調整入力可能に形成されている。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】多慣性系と見なされる機構をモータによって位置制御する時に、動作指令に対して、振動等を生じずに応答性高く追従するフィードフォワード制御を実現するモータ制御装置を提供する。
【解決手段】位置フィードバックコントローラを通して与えられる指令出力に対して、負荷速度からモータ速度までの伝達特性に基づくフィルタ処理を行い、処理結果を前記速度フィードバックコントローラへの速度指令値として出力する第1のフィルタ手段VFF2と、前記指令出力に対して、モータトルクから負荷速度までの伝達特性の逆特性に基づくフィルタ処理を行う第2のフィルタ手段VFF1とを有する。これにより、前記速度指令値を前記速度フィードバックコントローラへの速度フィードバック値に加算すると共に、前記第2のフィルタ手段の処理結果を、前記速度フィードバックコントローラを通して与えられるモータトルク指令値に加算する構成とした。
(もっと読む)
位置決め制御装置とその制御方法
【課題】 機械位置のフルクローズドループ制御でありながら、モータ位置を制御した時と同等の応答性と機械位置を制御したときと同等の精度を得ることができる位置制御装置とその制御方法を提供する。
【解決手段】 位置指令とモータ位置信号とのモータ位置偏差から速度指令を生成する位置制御部(1)と、速度指令とフィードバック速度信号との速度偏差からトルク指令を生成する速度制御部(2)と、トルク指令に基づいてモータを駆動するトルク制御部(3)と、モータ位置信号からモータ速度信号を生成するモータ速度信号生成部(4)と、モータ速度信号をフィードバック速度信号とするフィードバック速度信号生成部(5)と、を備えた位置決め制御装置において、位置指令と機械位置信号との機械位置偏差から補正位置指令を生成する補正位置制御部(6)と、補正位置指令をオンするスイッチと、オンオフされた補正位置指令と位置指令を加算して新たな位置指令を生成する加算器(17)と、を備えた。
(もっと読む)
小型高精度位置決め機構、その制御方法及びそれを用いた高エネルギー粒子発生装置
【課題】従来のものと比較してより小型で、かつバックラッシによる誤差を防止して位置決め対象を正確に位置決めすることができる小型高精度位置決め機構、その制御方法及びそれを用いた高エネルギー粒子発生装置を提供する。
【解決手段】
制御部270は、直流モータ(DCモータ210)に対して前方の所定の停止位置に向かって位置決め対象を前進させる際には、位置決め対象を初期位置から停止位置を超えて前進させた後、後退させて位置決め対象が停止位置に達するまで直流モータを回転させる一方、直流モータ(DCモータ210)に対して後方の停止位置に向かって位置決め対象を後退させる際には、位置決め対象が停止位置に達するまで直流モータを回転させるように制御する。
(もっと読む)
パワーアシスト機能を実現する移動装置
【課題】サーボ制御から減速制御を経てインピーダンス制御に連続的に変化させることによってパワーアシストする装置を、力覚センサを利用しないで構築する技術を提供する。制御系の2重化による安全性の向上、またはパワーアシスト装置のコストダウンに有用である。
【解決手段】駆動機構を持つ移動体と、3種類の制御手段(サーボ制御手段、減速制御手段、加速度に基づいてインピーダンス制御する手段)を備えている。サーボ制御された状態で移動体が作業者の近傍に移動した時に制御パラメータを徐々に変化させることによってサーボ制御手段による制御状態から減速制御手段による制御状態に徐々に切換える切換え手段と、移動体に操作が加えられた時に制御パラメータを徐々に変化させることによって減速制御手段による制御状態からインピーダンス制御手段による制御状態に徐々に切換える切換え手段を備えている。
(もっと読む)
アクチュエータの位置変動抑制方法
【課題】波動歯車減速機の角度伝達誤差に起因するアクチュエータ出力軸の低回転速度領域での回転変動を効果的に抑制すること。
【解決手段】アクチュエータ出力軸7のフィードバック制御に用いる速度指令ωrには、波動歯車減速機5の角度伝達誤差による位置成分が加えられている。また、その速度フィードバック値ωfには、モータ回転軸4の検出位置から演算された速度に、波動歯車減速機の角度伝達誤差による速度成分が加えられている。これらの速度指令ωrおよび速度フィードバック値ωfを用いてアクチュエータ出力軸7の回転をフィードバック制御することにより、波動歯車減速機5の角度伝達誤差に起因するアクチュエータ出力軸7の回転位置変動、特に、モータ回転軸4が100rpm程度以下の低速回転領域におけるアクチュエータ出力軸7の回転位置変動を確実に抑制できる。
(もっと読む)
1 - 20 / 25
[ Back to top ]