
Fターム[5H303FF09]の内容
位置、方向の制御 (6,897) | 位置検出信号の種類 (287) | 大きさを有する信号であるもの (247) | デジタル信号であるもの (84) | 増分値信号であるもの (50) | パルス列信号であるもの (41)
Fターム[5H303FF09]の下位に属するFターム
Fターム[5H303FF09]に分類される特許
1 - 20 / 35
制御パラメータ推定方法及び制御パラメータ設定装置
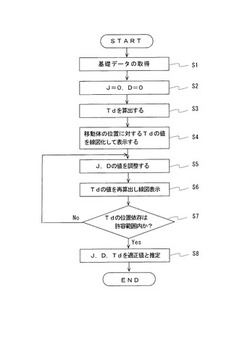
【課題】 送り装置において、移動体の位置や各指令移動位置を補正する制御を的確に行う。
【解決手段】 送り装置の制御において、駆動モータに入力されるトルク値をTとして、移動体を軸方向に往復動させ、一定時間毎又は移動体の予め定められた位置毎の駆動モータの角速度ωを計測し、計測された各角速度ω及びその時の前記入力トルクTを基に、下式に従って、各角速度ω及び入力トルクTに応じたパラメータTdを算出した後、算出したパラメータTdの前記位置への依存が小さくなるように、パラメータJ及びDの少なくとも一方の値を調整して、パラメータTdを再算出し、得られた調整後のパラメータJ、D及びTdの値を該パラメータJ、D及びTdの適正な値と推定する。
(数1)
Td=T−J(dω/dt)−Dω
(もっと読む)
位置制御装置

【課題】簡素な構成で可動部材の位置を高精度に検出するとともに、高精度に停止位置の制御ができる位置制御装置を提供する。
【解決手段】直流電気モータ39〜42と、電気モータによって可動部材を移動させる移動手段2と、ブラシとコミュテータとの間の断続によって電気モータへの供給電流に発生するリップル成分を抽出してパルス化したリップルパルスを出力するパルス検出部38と、可動部材が移動されるときの現在位置を示す現在位置情報をリップルパルスに基づいて演算し記憶する現在位置情報記憶部44と、電気モータ39〜42に供給される電流が0となる前に可動部材が停止するように電流を低下させる電流制御装置45と、を備える。
(もっと読む)
位置決め制御装置
【課題】 上位コントローラと、該上位コントローラからの起動信号に基づいて被搬送物を搬送するサーボモータと、該サーボモータを可変速駆動するサーボアンプとを用いて形成される位置決め制御装置の省配線を図る。
【解決手段】 フィルム1をローラ2で一定量だけ定寸送りしつつ、カッター4で裁断するときに、ローラ2を駆動するサーボモータ11を可変速制御するサーボアンプ40を位置指令生成部41、移動量メモリ部42、位置・速度・電流制御部43、位置ラッチ部44、状態監視フラグ部45、位置決め完了判定部46で形成することにより、フィルム1上に印刷されたマーク1a,1b,・・・をその都度通過したタイミングで発生する信号がオンされると状態監視フラグ部45の状態監視フラグをセットし、この状態監視フラグの状態を上位コントローラ31に出力する。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 制御対象物を適切に制御できない場合であっても、制御対象物の移動を確実に停止できる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させる移動機構2と、移動機構2を制御する制御装置3とを備えるものであって、制御装置3は、制御対象物の軸方向への移動を停止させる停止手段30を有し、停止手段30は、制御対象物の軸方向への移動速度を監視する速度監視部302と、制御対象物の軸方向への移動速度が所定の閾値を超えているか否かを判定する判定部303と、制御対象物の軸方向への移動速度が所定の閾値を超えている場合に、制御対象物の移動を停止させる停止部304とを備える。
(もっと読む)
自動ドア駆動制御装置
【課題】本発明は、特定の速度域において最適となるように調整された制御ゲインがその速度域以外では最適な制御ゲインとならないことに起因する速度の不安定性を解消でき、制御の応答性を向上できる自動ドア駆動制御装置を提供することを課題とする。
【解決手段】本発明による自動ドア駆動制御装置では、フィードバック速度制御部32は、自動ドアのドア体を開閉するモータ10への入力電圧20aを、速度指令43aと検出開閉速度60aとに基づいて制御することで、ドア体の開閉速度制御を行う。ゲイン変更部33は、ドア体の現在位置42aに応じてゲイン変更指令33aをフィードバック速度制御部32に入力して、フィードバック速度制御部32の開閉速度制御の制御ゲインを変更する。
(もっと読む)
モータ駆動装置
【課題】速度制御で動作するモータ駆動装置において、バックラッシュ補正を行う手段を提供することを目的とする。
【解決手段】コントローラ2は、モータ駆動装置1からのモータ位置フィードバックパルス113をパルスカウンタ202で受信し、モータ位置203を得る。モータ位置203を位置指令201と減算器204で比較し、位置偏差205を得る。位置偏差205は位置比例制御器206で位置比例ゲイン倍されて速度指令207となる。これをD/A変換器208でアナログ速度指令209に変換し、モータ駆動装置1に出力する。
(もっと読む)
位置決め制御装置及びその方法
【課題】処理対象物の特定箇所に処理部を位置決めさせることを、コストを抑制しつつ、より簡易的に実施可能な位置決め制御装置及びその方法を提供する。
【解決手段】位置決め制御装置のコントローラ17は、可動体8の検知部9が処理対象物を検知することにより出力されるセンサ信号及びサーボモータ15の駆動に用いられるパルス信号を受信する手段と、可動体8を処理対象物の横断方向に移動させてセンサ信号が出力される間におけるパルス信号に関する情報と処理対象物のタイプとの関係を定めたテーブルを用いて、処理対象物のタイプを特定する手段と、特定した処理対象物のタイプに基づき、処理対象物のタイプと被処理部の位置との関係を定めたテーブルを用いて、処理対象物の被処理部の位置を特定する手段と、当該特定に基づくパルス列を生成してモータドライバ16に送信する手段とを有することを特徴とする。
(もっと読む)
位置制御装置
【課題】 制御対象機械を目標位置へ移動させて停止させるための位置制御装置において、オーバーシュートの抑制とサイクルタイムの短縮を可能にする。
【解決手段】 フィードフォワード制御ブロック27aは位置指令ブロック21からの前記位置指令値に対して、フィードフォワード設定手段41で設定し出力されるフィードフォワードゲインを乗じた値を、新たな補正量として出力する機能を有し、この位置制御装置40が位置決め制御動作を開始すると、フィードフォワード設定手段41では、位置指令ブロック21からのパルス列形式の位置指令値に含まれるパルス周波数の変化に基づく速度指令演算値を求めつつその変化を監視し、この速度指令演算値が予め定めた切換設定値より小さいときにはフィードフォワード制御ブロック27aへのフィードフォワードゲインのより小さく設定することにより、位置決め終了時のオーバーシュートの抑制と位置決め開始から終了までのサイクルタイムの短縮とを可能にしている。
(もっと読む)
サーボモータ制御回路
【課題】モータの作動異常判定を迅速に行うとともに、迅速にモータを停止させることが可能なモータ制御回路を提供する。
【解決手段】通信可能に接続された主制御装置から、制御対象を駆動するサーボモータの目標停止位置を含むサーボモータ駆動指令を受信する受信手段と、サーボモータの出力軸に設けられ、該サーボモータの回転位置を検出する回転位置検出手段と、サーボモータの回転位置が目標停止位置に到達するように、該サーボモータを駆動制御する駆動制御手段と、を備えるサーボモータ制御回路であって、サーボモータの回転位置の変化を検出する回転位置変化検出手段と、回転位置の変化に基づいて、該サーボモータが作動限界位置に到達したか否かを判定する作動限界判定手段と、を備え、駆動制御手段は、サーボモータが作動限界位置に到達したと判定したとき、主制御装置からのサーボモータ駆動停止指令を受信することなくサーボモータの駆動を停止する。
(もっと読む)
位置決め装置及び位置決め方法
【課題】被駆動体の電源遮断後における再起動時に位置の特定を必要とする最終出力端の現在位置を特定可能な位置決め装置及び位置決め方法を提供する。
【解決手段】被駆動体を減速機を介して駆動するモータ10と、減速機の被駆動体側出力軸に取り付けられ出力軸の回転位置を検出するアブソリュート型エンコーダ12と、モータの回転位置をパルスを介して検出するモータ側エンコーダ11と、電源投入によりモータを原点方向に動作させ、モータ側エンコーダの基準エンコーダパルスを出力させるパルス出力手段と、基準エンコーダパルスの位置におけるアブソリュート型エンコーダの現在値を読み取る現在値読み取り手段と、読み取った現在値と予め決められたモータの回転原点位置とからモータ回転数を演算するモータ回転数演算手段と、演算結果に基づき被駆動体の位置を検出する被駆動体位置検出手段とを備えている。
(もっと読む)
産業用コントローラ
【課題】 従来からユニット間データを送受する際に用いられているバス(システムバス)を利用し、同期制御専用のバスを持たせることなく同期制御機能を実現すること
【解決手段】 CPUユニットは、通常のサイクリックに行う処理実行中にタイマ割り込みが入ると、その処理を中断し、同期制御を行う他の同期ユニットに対してシステムバスを用いて同期データを一斉同報で送信する。同期ユニットは、一斉同報による同期データを受信したことを契機として同期サイクルを実行し、その同期サイクルの開始に伴い、受信した同期データを取得し、入出力処理を実行後、INデータの同期データのリフレッシュ処理(a)を行う。CPUユニットは、そのINデータの同期データリフレッシュを行い(b)、同期割り込みタスク処理により次に送信する同期データを求める(c)。同期ユニットは、常に最新の同期データを取得し、同時に動作する。
(もっと読む)
既設輪転印刷機と増設シャフトレス式輪転印刷機の同期運転方法及び同期位置制御システム
【課題】ロータリーエンコーダなどを追加することなく既存ラインシャフト式輪転印刷機に同期させて増設シャフトレス式輪転印刷機の高精度同期位置制御を実現すること。
【解決手段】電動機駆動制御装置8は、ラインシャフト(機械軸)11に設けられたパルスジェネレータ(PG)9が出力する速度位置パルス信号6と速度指令3に基づき電動機13を制御しラインシャフト11の速度が速度指令に一致するよう制御する。速度パルス信号6はコントローラ21で周波数がn(n>1)倍され、折機が一回転する毎に近接スイッチ19から出力される機械位相信号20とともにシャフトレス輪転印刷機の同期位置制御装置23に送られる。各同期位置制御装置23は、コントローラ21の出力及び機械位相信号20とロータリーエンコーダ25の出力の速度位置検出信号26及び近接スイッチ32の出力の機械位相信号33に基づき各電動機24の高精度同期位置制御を行う。
(もっと読む)
アクチュエータおよび制御方法
【課題】非線型特性によるサーボ弁の制御性低下を防止する。
【解決手段】中空のシリンダと、シリンダに収容されて、シリンダと共に一対の圧力室を形成しつつ、シリンダに対して相対移動するピストンと、一対の圧力室の各々を、作動流体の圧力源または排気部に対して連通または遮断させる一対の制御弁と、シリンダに対するピストンの位置を検出する位置検出器と、一対の圧力室の少なくとも一方から作動流体を排気させる排気弁と、位置検出器が検出する位置が所与の目標位置に近づくように、制御弁を制御する制御部とを備える。
(もっと読む)
位置決め装置および制御方法
【課題】静止安定性を有する位置決め装置。
【解決手段】対象物を移動させる駆動力を発生する駆動部と、対象物を目標位置に向かって移動させるべく駆動部をサーボ制御する制御部と、対象物を、駆動力よりも大きな固定力で固定する固定部とを備え、移動した対象物が目標位置に到達した後、少なくとも固定部が対象物を固定するまで、制御部は、対象物が移動していた期間のサーボゲインよりも小さなサーボゲインでサーボ制御を継続する。上記位置決め装置において、浮上力を発生させて対象物を浮上させる浮上力発生部を更に備え、浮上力発生部が浮上力の発生を停止した後、少なくとも少なくとも固定部が対象物を固定するまで、制御部は、力発生部が対象物を浮上させていた期間のサーボゲインよりも小さなサーボゲインでサーボ制御を継続してもよい。
(もっと読む)
記録装置
【課題】 記録装置において、キャリッジの減速時に、モータの逆起電力のためにモータに流す電流の最小値が制限される。このために、振動や騒音が発生しやすい。
【解決手段】 キャリッジの減速時に、キャリッジの移動量と目標軌道とのいずれか一方あるいは両方が、所定の閾値よりも絶対値で大きい場合は、モータドライバへの入力信号を所定の値で保持する。
(もっと読む)
サーボ制御装置、方法及びプログラム、並びにインクジェット記録装置
【課題】オーバシュート現象の発生を抑えるとともに、CPU負荷を低減したサーボ制御装置、方法及びプログラムを提供する。
【解決手段】プリンタヘッド404と、これを駆動するDCモータ6004と、プリンタヘッド404の位置及びを速度を検出する検出手段と、プリンタヘッド404を駆動する速度の目標値である目標速度プロファイルを生成し、DCモータ6004による駆動力の指示値である駆動出力値を演算するCPU401とを有し、駆動出力値をデジタル演算によって特定の制御周期で離散的に演算して、少なくとも被駆動体の速度を速度目標値に近づけるように制御するサーボ制御装置であって、デジタル演算を行う制御周期が可変である。
(もっと読む)
シャフトレス輪転印刷機における同期制御装置および同期起動方法
【課題】輪転印刷機を停止状態から速やかに起動させ、起動時に機械の振動、ギヤ鳴り、及び連続紙の破断や弛みの発生を解消して速やかに同期制御に移行させること。
【解決手段】輪転印刷機の同期制御システムにおいて、集中制御装置01にバーチャル回転指令発生装置0101を、印刷機、折り機の同期駆動装置に位相指令検出装置0601、位相FB検出装置0602、0603を設置する。また、折り機に周期的な負荷変動の影響を抑止する回転補償器を設置する。そして始めは徐動速度にて滑らかに運転し、安定となった徐動運転中に折り機の位相FB検出装置0603の出力をバーチャル回転指令発生装置0101にプリセットした後、各印刷機と折り機の位相制御をオンとする。これにより、折り機は原点合わせ動作を必要とせず同期制御へ移行し、各印刷機は原点合わせゲインGzを用いて滑らかに原点合わせを行った後同期制御へ移行する。
(もっと読む)
サーボ制御装置およびこの制御装置の電流検出方法
【課題】本発明は、停止時の電流検出の分解能を上げるとともに、停止時の振動を抑えることができる方法を提供することを目的とする。
【解決手段】ΔΣ方式のA/D変換器による電流検出手段を備えたサーボ制御装置の電流検出方法において、前記サーボ制御装置は、フィルタ10のフィルタリング時間が切替えられる切換手段11を備えたものである。
(もっと読む)
位置決め制御装置
【課題】エンコーダのプリセットに要する時間を大幅に短縮することができ、位置決めデータの記憶容量が制限されることが無い位置決め制御装置を提供する。
【解決手段】本発明にかかる位置決め制御装置20は、移動体を駆動するサーボモータ13と、サーボモータ13の回転量を検出するインクリメンタル型のエンコーダ21と、位置決め制御信号とエンコーダ21からの検出信号を受けてサーボモータ13を駆動制御するサーボドライバ22と、直線軌道における移動体の位置を計測するレーザ距離計23と、移動体の位置決めデータを記憶していてサーボドライバ22に位置決め制御信号を出力する制御装置16と、を備え、制御装置16は、電源投入後、移動体の位置決め制御動作に先立って、レーザ距離計23からの計測データを用いてエンコーダ21をプリセットする。
(もっと読む)
モータの負荷イナーシャ推定方法
【課題】 モータのコギングトルクが大きい場合や、負荷の機械系に共振などがあっても、高い精度でモータの負荷のイナーシャを推定する方法を提供する。
【解決手段】 加速度フィードバック信号中の振動を検出する。そしてこの振動が、予め定めたレベル以上あるときには、イナーシャ推定ゲインKnに0以上1未満の係数αを乗算する。またこの振動が予め定めたレベルより小さいときには、イナーシャ推定ゲインKnに1の係数αを乗算する。
(もっと読む)
1 - 20 / 35
[ Back to top ]