
Fターム[5H303GG06]の内容
Fターム[5H303GG06]の下位に属するFターム
差動トランス、コイル (1)
レゾルバ、インダクトシン (12)
磁気抵抗素子 (3)
ホール素子 (5)
Fターム[5H303GG06]に分類される特許
1 - 20 / 21
ステージ移動装置及び無接点充電器
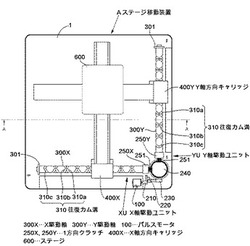
【課題】可及的に安価で、モータ制御が簡単なステージ移動装置を提供する。
【解決手段】ステージ移動装置1を、1個の正・逆回転可能なモータ100と、互いに直角に交差して配置され、交差部分にステージ600を保持するX軸方向キャリッジ400X及びX軸方向キャリッジ400Xと、モータ100の回転力をX軸方向キャリッジ400XをX軸方向に移動させる経路に伝達するか、Y軸方向キャリッジ400YをY軸方向に移動させる経路に伝達するかをステージ600の移動目標に応じて切り替える動力伝達経路切替手段と、モータ100の回転軸の回転運動をX軸方向キャリッジ400Xの直線往復運動又はY軸方向キャリッジ400Yの直線往復運動に変換する運動方向変換手段と、X軸方向キャリッジ案内手段及びY軸方向キャリッジ案内手段と、ステージ600の移動目標に応じてモータ100の回転方向及び回転角度を制御するモータ制御装置とで構成した。
(もっと読む)
機器移動システム

【課題】機器移動システムにおいて、所定の移動面に沿って任意の機器を任意方向に自律的に移動可能とする。
【解決手段】機器移動システム1は、所定の移動面Sに沿って移動することができる移動ユニット2を備える。移動ユニット2は、任意の機器10が搭載される移動体11と、移動体11に一体的に設けられたアクチュエータ3と、移動体11を移動面Sに拘束する拘束装置13とを備える。アクチュエータ3は、電磁力に基づく衝撃を発生し、移動体11を衝撃力の方向に移動させる。拘束装置13は、移動ユニット2を移動面Sに対して移動自在かつ摩擦力が発生するように機械力または電磁気力により拘束する。機器10が受電機器に給電する給電用1次コイルであり、受電機器が移動面Sの上方の任意位置に載置されると、移動ユニット2が受電機器の下部に移動し、給電用1次コイルを受電機器の位置に移動して給電でき、給電場所に融通性を持たせることができる。
(もっと読む)
線形運動デバイスの制御装置
【課題】検出磁場と線形運動デバイスの位置とにずれがある場合でも、線形運動デバイスを正確に位置決めすることができる線形運動デバイスの制御装置を提供する。
【解決手段】デバイス11の磁石19が発生する磁場を検出し、検出された磁場の値に応答する出力信号VMOを出力する磁場センサ113、制御信号VCM[2:0]と出力信号VMOの振幅とを関連付けた電圧指令信号VCOを生成する電圧信号生成回路114、出力信号VMOと電圧指令信号VCOとの偏差を増幅して出力信号VEOを生成する差動増幅器115、出力信号VEOの値に応じて線形運動デバイス11を駆動する出力ドライバ112と、出力信号VEOを、磁場センサ113から出力される出力信号VMOの振幅に応じて補正し、出力ドライバ112への入力信号を生成するゲイン補正回路116によって制御装置を構成する。
(もっと読む)
4軸アライメントステージの原点位置設定方法
【課題】 4軸制御の原点復帰動作を駆動軸同士の機械的な姿勢の相互干渉を抑えた状態で可能にする。
【解決手段】 XYθガイドとボールねじ直動機構からなる駆動ユニットを4台備えた4軸アライメントステージにて、各駆動ユニットに仮の原点位置を設定して(S1)、それを基準に4軸制御による原点復帰動作を行う(S3)。次いで、全軸同時サーボオフを行い(S4)、その直後に生じる各駆動ユニットのガイドブロックの移動量を計測し(S5)記憶させる(S6)。その後、移動量の計測値を補正量として各駆動ユニットの仮の原点位置を補正し(S7)、補正後の仮の原点位置を基準とする原点復帰動作と、全軸同時サーボオフ直後の移動量の計測及び記憶と、移動量の計測値を補正量とする仮の原点位置の補正を繰り返し、全軸同時サーボオフ直後の移動量が収束したときの仮の原点位置を、4軸制御による実際の原点復帰動作用の原点位置に設定する。
(もっと読む)
位置検出システム及びケーブルユニット
【課題】単純なシステムで位置制御を可能とし、設備費用を低減できる位置検出システム及びケーブルユニットを提供する。
【解決手段】位置検出システムは、所定の移動経路10に沿って移動可能な移動機20と、位置情報を記憶するとともに前記移動経路10に沿って並列配置された複数のICタグ34と、移動機20側に設けられ、対応する読取範囲A1に配された前記ICタグ34の位置情報を読み取る第1アンテナ26と、を備える。
(もっと読む)
搬送制御装置、搬送装置の制御方法、及び観察装置
【課題】駆動機構の搬送量誤差と原点センサーの位置検出誤差を個別に加味した制御動作を実行する搬送制御装置を提供する。
【解決手段】本発明に係る搬送制御装置は、往復移動体を駆動する駆動機構と、原点センサー5と、駆動機構2の駆動量を検出する駆動量検出手段と、往復移動体が静止状態から移動状態に移行した時点を光学的に検知する移動検知手段とを具え、原点センサー5が第1出力状態から第2出力状態となるまで往復移動体を一方向に移動させた後、原点センサー5が第2出力状態から第1出力状態となるまで往復移動体を逆方向に移動させ、原点センサー5が第2出力状態となった後に往復移動体が静止状態から移動状態へ移行するまでの第1の駆動量と、往復移動体が移動状態へ移行した後に原点センサーが第1出力状態となるまでの第2の駆動量とを取得する。
(もっと読む)
ボール螺子熱変位補正装置
【課題】指令値に対する移動量の誤差を抑えることができるボール螺子熱変位補正装置を提供する。
【解決手段】軸長方向に沿って延びると共に中心軸心P1の回りで回転可能なボール螺子2と、ボール螺子2を回転可能に支持する支持部をもつ固定部と、ボール螺子2に接続され前記ボール螺子2を中心軸心の回りで回転させる駆動部5と、ボール螺子2に係合されボール螺子2の回転に伴い軸長方向に沿って移動する可動部6と、可動部6に保持され可動部6と共に軸長方向に沿って移動する可動側衝突子7と、固定部4において可動部6の前進端側に設けられ、可動部6と共に軸長方向に沿って移動する可動側衝突子7と衝突可能な固定側衝突子8と、可動側衝突子7および固定側衝突子8の衝突に基づく衝突変位量を求め、衝突変位量に基づいて可動部を移動させる補正移動量を設定する制御部9とを有する。
(もっと読む)
アクチュエータの回転伝達誤差補正方法およびアクチュエータの駆動制御装置
【課題】出力軸を支持する転がり軸受けに起因する回転伝達誤差を補正できるアクチュエータの回転伝達誤差補正方法を提案すること。
【解決手段】アクチュエータ2の出力軸6を支持するベアリング7の転動体7cの1つにマグネット10を組み込み、ホールセンサ12によってマグネット入りの回転位置検出用転動体11が1回転することを検出し、1回転の間において、モータ軸4を一定角度回転させる毎に出力軸6の実回転位置を検出する。検出結果に基づきモータ軸4の各回転位置における、出力軸6の実回転位置のその目標回転位置からのずれ量を算出して記憶部1aに記憶する。駆動制御装置1は、アクチュエータ2の駆動制御時には、記憶部1aに記憶されているずれ量に基づき出力軸6の回転位置を補正し、ベアリング7に起因する回転伝達誤差を除去する。
(もっと読む)
可動情報を伝送するための位置測定装置及び方法
【課題】数値制御機械等において、制御部へ正確なデータを伝送する位置測定装置を提供する。
【解決手段】位置測定装置は、位置測定ユニット10、速度測定ユニット20、算術ユニット30、及びインターフェースユニット40を持つ。位置測定ユニット10で2つの測定値(P;Pn;Pn−1)が測定され、速度測定ユニット20で物体の移動値vが算出される。算術ユニット30は測定値(P;Pn;Pn−1)及び移動値vが供給されて、シーケンス電子部100における実際の測定値(P;Pn;Pn−1)の測定間の時間間隔を特定し、移動値vの訂正値Kを算出する。そのために、訂正値Kのデータワード幅が、移動値vのデータワード幅より実質的に小さい。
(もっと読む)
ターボチャージャ制御装置および方法並びにモータ回転位置制御装置および方法
【課題】自動車のターボチャージャ1の可変翼1aを駆動するモータ2のモータ回転位置制御装置において、エンコーダ3の欠相時にも、バックアップによりターボ運転を継続できるターボチャージャ制御装置を提供する。
【解決手段】イグニッションスイッチIGNをONしたときのイニシャライズ時に、2相エンコーダ3の欠相を診断し、健全相のエンコーダ信号のみを用いて、モータ2の回転位置制御を継続し、ターボ運転を続行する。
(もっと読む)
位置決め装置
【課題】簡素且つ軽量な構成で高精度な位置決めを実現できる位置決め装置を提供する。
【解決手段】移動部材3の両端近傍をスライダ3d、3dと支持部3bとでそれぞれ支持することで、移動部材3をガイドレール2,2に沿って精度良く移動させることができると共に、移動部材3に熱膨張が生じた場合でも、その熱膨張分を静圧軸受3aを介して基台1に対して非接触状態で支持される支持部3bの変位により吸収し、移動部材3に歪みを与えない。更に、リニアモータ5、5が、基台1に対して、移動部材3の両端側を駆動するので、スライダ3d、3dと支持部3bとで移動時の抵抗が異なる場合でも、リニアモータ5、5による駆動を相対的に調整することで、駆動時における移動部材3の姿勢変化を抑えることができ高精度な位置決めを実現できる。又、移動部材3の両端側を駆動することで移動部材3の剛性を低くでき、移動部材3の軽量化を図ることができる。
(もっと読む)
慣性モーメント同定器を備えたモータ制御装置
【課題】微小動作のみで可動範囲の限定された負荷を低剛性に連結したモータの負荷慣性モーメントを同定することができる慣性モーメント同定器を備えたモータ制御装置を提供する。
【解決手段】トルク指令を入力しトルク指令フーリエ係数を出力するトルク指令フーリエ変換器108と、モータ位置を入力しモータ位置振幅を出力するモータ位置振幅演算器109と、トルク指令フーリエ係数とモータ位置振幅を入力し慣性モーメント同定値を算出する慣性モーメント演算器110と、を有する慣性モーメント同定器107を備える。
(もっと読む)
ベルト駆動サーボ装置の位置制御方法。
【課題】 従来のベルト駆動サーボ装置ではプーリとベルトとの噛合いの変動によりモータカ移転速度に比例した周波数の駆動力リップルが発生し、可動部が振動したのを本発明により解消する。
【解決手段】 モータ6と、モータのシャフトに結合されたプーリと、プーリによって駆動されるベルトと、ベルトに結合された可動部とを備えたベルト駆動サーボ装置の位置制御方法において、モータ6の速度から外乱推定オブザーバ9により外乱力を推定し、推定した外乱力推定値をモータトルク指令に減算(5)して外乱力を補正すると同時に、加速度センサ10で可動部の加速度を計測し、フィルタ11を通して比例加速度制御ループを構成することにより、可動部の振動を減衰させるようにした。
(もっと読む)
距離算出装置及び距離算出方法
【課題】本発明は、生産コストを低減させるとともに、台車の移動距離を高精度に算出することを目的とする。
【解決手段】
本発明は、台車100に備えられ、外部から駆動力が与えられることにより台車100を走行経路L上で移動させる駆動輪110と、駆動輪110とは別に台車100に備えられた補助輪120と、補助輪120の回転量に応じたパルスを出力するインクリメンタルエンコーダ140と、走行経路L側に備えられたマークMを検知するマーク検知部150と、マーク検知部150によりマークMが検知されたことに基づいて、マークMに対応する走行経路Lにおける位置を特定する位置特定部161と、インクリメンタルエンコーダ140から出力されたパルスに基づいてパルスの数を計数することにより、位置特定部161により特定された位置から台車の移動距離を積算する距離算出部162とを備えている。
(もっと読む)
信号処理装置、信号処理方法、信号処理プログラム、信号処理プログラムを記録した記録媒体、速度検出装置、サーボ機構
【課題】 エンコーダからの信号に基づいて迅速に制御対象の駆動速度を得る信号処理装置を提供すること。
【解決手段】モータの駆動位置に応じてセンサから出力される位置情報信号(Asinθ、Acosθ)を信号処理してモータの駆動速度を検出する。位置情報信号を信号処理してモータの駆動速度情報を算出する位置情報信号処理部410と、位置情報信号処理部410にて算出される最新の駆動速度情報ωnを反映してモータの最新の推定位置を内部位置情報として生成する内部位置情報生成部460と、を備える。
位置情報信号処理部410は、センサからの位置情報信号(Asinθ、Acosθ)と内部位置情報生成部460にて生成される内部位置情報(Asinθn、Acosθn)との差分に基づいてモータの駆動速度情報ωnを算出する。
(もっと読む)
サーボ制御装置とその制御方法
【課題】 少ない計算量で、外乱抑圧特性を向上させるだけでなく、完全に位置指令θrとアーム位置θaを一致させることができるサーボ制御装置を提供する。
【解決手段】 制御対象の制御量xdが指令refに一致するようにフィードバック制御器と、フィードフォワード制御器と、オブザーバとを備えたサーボ制御装置において、フィードバック制御器は、オブザーバによる状態量推定値shにゲインGを乗じたものを第2の操作量tfb2にフィードバックする構成であり、フィードフォワード制御器は、操作量trefから前記制御量xdまでの伝達関数P1の逆関数P1−1および、制御対象の状態量を検出する検出器の出力xfbから制御量xdまでの伝達関数P2の逆関数P2−1を含むようにした。
(もっと読む)
同期制御装置
【課題】 2軸間の位置及び速度の同期誤差を最小にするように制御する同期制御において、1軸目、2軸目どちらに外乱が与えられた場合でも、また、2軸間で摩擦の大きさが大きく異なるような場合でも、2軸を同期させることができるとともに、定常状態においても過渡状態においても、また、速度フィードバックだけでなく位置フィードバックも同期させることができるようにする。
【解決手段】 各軸について位置フィードバックによる位置制御手段を備えた同期制御装置において、位置指令に基づいて各軸のフィードフォワード信号を作成するフィードフォワード制御部と、2軸間の位置フィードバックの差から同期誤差を求める同期誤差演算部と、求められた同期誤差から位置補正信号を求める位置補正信号演算部と、各軸のフィードフォワード信号と位置補正信号から各軸のフィードフォワード補正信号を求めるフィードフォワード補正信号演算部と、フィードフォワード補正信号を速度指令に加える加算部と、を備える。
(もっと読む)
位置決め装置
【課題】簡便かつ安価な構成で、可動部材の傾きを抑えながら位置決め制御できる位置決め装置を提供する。
【解決手段】位置決め装置10は、圧電素子14、圧電素子14の一端に固定された駆動部材16、および、駆動部材16上に移動可能に摩擦保持された可動部材18からなる圧電アクチュエータ20と、圧電素子14を駆動する駆動回路21と、可動部材18の位置を検出する位置センサ25と、位置センサ25からの信号を処理する検出回路26と、検出回路26による位置検出値に基づいて駆動回路21に駆動指令信号を与えることで可動部材18の位置フィードバック制御を行う制御回路28とを備え、可動部材18の位置決め動作の際、制御回路28は、可動部材18が目標停止位置に一旦到達した後に、オーバーシュートを伴う位置決め制御を所定時間以上さらに継続する。
(もっと読む)
バルブポジショナ,バルブ駆動装置
【課題】 バルブの動作角度に応じて,前記制御感度を自動で適切に調節することが可能なバルブポジショナ,及びバルブ駆動装置を提供することにある。
【解決手段】
バルブの目標角度に対する検出角度の偏差に基づいてバルブ駆動用アクチュエータを制御する場合に,バルブの検出角度(実際の動作角度)に基づいて,バルブ駆動用アクチュエータの制御感度を調節することを特徴とするバルブポジショナとして構成される。
具体的には,A/D変換器2bからのデジタル信号(検出信号)が変化した場合,動作感度算出回路9が記憶部8に記憶されている動作感度テーブルを参照し,バルブの検出角度に応じて判断回路3における不感帯の幅を設定する。
(もっと読む)
XYステージ
【課題】 スライダ部の加速時、減速時、定速移動時の振動発生時にピッチング及びローリングを抑制する機能を具備したXYステージを実現する。
【解決手段】 スライダ部を2次元方向に位置制御するXYステージにおいて、スライダ部のピッチング角速度を検出するための信号を出力する第1のZ軸センサと、スライダ部のローリング角速度を検出するための信号を出力する第2のZ軸センサとを有することを特徴とするXYステージである。
(もっと読む)
1 - 20 / 21
[ Back to top ]