
Fターム[5H303HH02]の内容
位置、方向の制御 (6,897) | 位置検出箇所 (427) | 位置決め対象の位置を直接検出 (201) | テーブル等に固定された対象であるもの (61)
Fターム[5H303HH02]に分類される特許
1 - 20 / 61
モータ制御装置
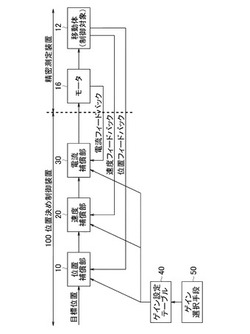
位置決め制御装置
【課題】精密測定装置に振動等が発生した場合に位置決め制御装置の制御ゲインを調整する際、その調整時間の短縮化、及び、ゲイン調整に掛かる労力の軽減化を図ること。
【解決手段】位置決め制御装置100は、位置補償部10、速度補償部20、電流補償部30、設定テーブル40及びゲイン選択手段50を有する。位置補償部10は目標位置及び検出位置の位置偏差を得て、これに基づき目標速度を制御する。速度補償部20は、目標速度及び検出速度の速度偏差を得て、これに比例ゲインKpを掛けた値及び速度偏差の積分に積分ゲインKiを掛けた値の加算値をモータの目標電流として出力する。電流補償部30は、目標電流及びモータの検出電流の電流偏差を得て、これに基づいて駆動電流を制御する。ゲインKp、Kiの設定値の組合せが複数通り設定テーブル40に記憶されており、選択手段50で選択された組合せに各ゲインが書き換えられるようになっている。
(もっと読む)
ステージ装置およびこれを用いた観察装置

【課題】観察サンプルを載置する可動テーブルをウォーキング形ピエゾモータにより駆動するピエゾステージと、前記ピエゾステージの移動を制御するステージ制御装置を有するステージ装置において、ピエゾステージの周期的な速度変動を抑制して、観察者がサンプルの移動を行う際の操作性と位置決め精度を向上する。
【解決手段】ピエゾステージ1のウォーキング形ピエゾモータ102を駆動する指令電圧標準データ304と、前記ウォーキング形ピエゾモータ102の出力に一定速度を与える様に予め測定した指令電圧出力タイミング補正データ305と、少なくとも前記指令電圧標準データ304および前記指令電圧出力タイミング補正データ305から前記ウォーキング形ピエゾモータ102を駆動する指令電圧を生成する指令電圧生成部302を有するステージ装置3が提供される。
(もっと読む)
波動歯車装置を備えたアクチュエータの位置決め装置
【課題】スライディングモード制御により波動歯車装置の非線形特性を補償するアクチュエータの位置決め装置を提案すること。
【解決手段】位置決め装置のスライディングモード制御器は、位置指令θl*、制御対象を表す状態変数xを入力として制御対象への制御入力uを生成する。制御対象は次式で規定する。
スライディングモード制御系の切換面は設計変数Sで規定する。
制御入力uは、σを切換関数、kを切換ゲイン、として、線形状態フィードバック制御項ulと非線形制御入力項unlの和である。 (もっと読む)
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及びパターン形成装置、露光方法及び露光装置、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 ウエハステージWSTの位置情報は、ウエハX干渉計18X1,18X2、ウエハY干渉計18Y等と、該干渉計に比べて計測値の短期安定性が優れるエンコーダ50A,50B等とを用いて計測される。エンコーダ50A,50B等は、計測値の短期安定性が良好であるので、ウエハステージWSTの2位置情報が精度良く計測される。ウエハステージWSTは、エンコーダ50A,50B等の計測範囲内では、それらの計測結果に基づいて精度良く駆動される。
(もっと読む)
位置制御装置
【課題】フルクローズド位置制御に於いて、送り軸機構部の剛性が低下した場合でも、低周波の振動が発生することなく、安定に動作させる位置制御装置を提供する。
【解決手段】被駆動体の位置検出値Plとモータの位置検出値Pmの差分を入力とした1次遅れ回路17の出力と、モータの位置検出値Pmを加算した位置検出値を位置フィードバック値として使用する位置制御装置において、経年変化補正器30が被駆動体の振動を検出した場合に、前記1次遅れ回路17の時定数Tpが大きくなるように可変することで低周波振動の発生を抑制する。
(もっと読む)
送り装置
【課題】サーボロック時の消費電力を削減することができる送り装置を提供する。
【解決手段】送り装置1は、ボールねじ21,ナット23,駆動モータ24,ブレーキ機構25及び制御装置50を備え、移動体13を上下方向に移動させる。制御装置50は、移動体13に関する早送りの移動指令を認識すると、移動体13を現在位置から上方向に移動させる場合には、早送りの移動指令に係る目標移動位置を越えて移動体13を移動させた後、移動方向を反転させて目標移動位置に移動体13を移動,停止させる一方、現在位置から下方向に移動させる場合には、移動体13を目標移動位置に直接移動,停止させるとともに、移動体13を目標移動位置に移動,停止させた後、駆動モータ24によって移動体13の位置を停止位置に維持し、且つブレーキ機構25によって移動体13の移動を制動する。
(もっと読む)
シフト装置
【課題】平面上の任意の位置にスライド操作可能な操作部に対しフォースフィードバック制御を行うことで、汎用性の高い二次元スライド操作タイプのシフト装置を提供する。
【解決手段】シフト装置1は、XY平面上の任意の位置へスライド操作可能なスライド操作部20と、スライド操作部の操作状態を検出するX軸及びY軸リニアエンコーダ161,162と、スライド操作部に力を付与するX軸及びY軸ボイスコイルモータ14,15とを備える。力覚制御部は、予め定められたシフトチェンジ操作の軌道である操作許容エリアの外縁部に「反力の壁」を生じさせるフォースフィードバック制御を行うことにより、軌道を逸脱するような異常なスライド操作を防止する。
(もっと読む)
位置制御装置および位置制御方法
【課題】距離に依存せずに高い精度で位置制御が可能な位置制御装置を提供する。
【解決手段】位置制御装置100は、第1情報を取得し、前記第1情報から特定される基準位置Bとステージ1との間の距離と所望の距離との差が、所与の範囲に含まれるか否かを判定し、前記所与の範囲に含まれない場合には、前記差が前記所与の範囲に含まれるようにステージ1の位置を制御する第1位置制御処理を行う第1制御手段31と、前記差が前記所与の範囲に含まれる場合には、前記第2情報を取得し、前記第2情報から特定される基準位置1とステージBとの間の距離に基づいて、基準位置Bとステージ1との間の距離が前記所望の距離となるようにステージ1の位置を制御する第2位置制御処理を行う第2制御手段32と、を含む。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 短時間で容易かつ確実に原点位置の検出ができる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2を移動させる駆動力を発生する駆動モータ3と、スピンドル2の位置を制御するとともに駆動モータ3の回転速度を制御する制御装置4とを備えるものであって、スピンドル2の位置に基づく信号を検出するインクリメンタル型のリニアエンコーダ11と、駆動モータ3の絶対角度に基づく信号を検出するアブソリュート型のロータリーエンコーダ12とを備える。
(もっと読む)
エンコーダ・フィードバック、誤差マッピング、および空気圧制御を用いた誤差補償システム
【課題】エンコーダ・フィードバック、誤差マッピング、および空気圧制御を用いた誤差補償システムを提供する。
【解決手段】リニア・エンコーダ23は、移動式往復台25の側面に設置した一対の側面リニア・エンコーダ23−1、23−1’と、移動式往復台25の一側部の下部に設置した一対の下面リニア・エンコーダ23−2、23−2’とで構成され、このように構成されたリニア・エンコーダ23が、基準マーク、垂直位置誤差を補償するためのLトラック、および水平位置[誤差]を補償するためのTトラックを有するスケールに沿って移動することで、高い精度レベルで平面度、ピッチ、真直度、ヨー、およびロールに関連した誤差を補償するものであり、したがって、加工することが不可能である部分を最小限にし、加工コストを減少させ、精密なステージを実現する。
(もっと読む)
外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法
【課題】設計者が試行錯誤することなく決定した伝達関数に基づく位相進み補償器と位相遅れ補償器により、共振の位相を安定化させることが可能な外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法を提供する。
【解決手段】
制御対象28に加わる外乱dを推定する外乱オブザーバ21において、外乱オブザーバ21は、制御対象28の共振成分を外乱dの一部として含んだ外乱モデルに基づいて相補感度関数のパラメータが設計されたことを特徴とする。
(もっと読む)
位置決め装置及び位置決めステージの位置決め方法
【課題】従来の位置決めでは、位置決めする際の整定範囲をゼロとして目標値に位置決めさせた場合、被駆動体がモータにより目標値に位置決めされた後もモータが常に小刻みに振動したり、外乱により被駆動体が整定範囲外に移動してしまう問題が発生する可能性があった。
【解決手段】位置センサが検出した位置決めステージが位置する現在値が第1の整定範囲内の場合は、位置決めステージの整定範囲を第2の整定範囲内に変更し、位置センサが検出した位置決めステージが位置する現在値が第1の整定範囲外の場合は、再度位置決めステージを第1の整定範囲内に位置するように移動させる。
(もっと読む)
制御方法及び制御装置
【課題】移動体を高精度に位置決め制御することができる制御装置などを提供する。
【解決手段】制御装置1は、与えられた目標移動位置及び移動速度を基に指令移動位置を生成し、生成した指令移動位置を基に送り装置50の駆動モータ73を制御する制御信号生成部12と、学習制御部16と、移動体52を往復動させたときに生じる送り装置50の転動体に起因した摩擦力又はこれと等価な力で定義される外力と移動体52の移動位置との相対データを基に、移動体52を目標移動位置に移動させた際に生じると推定される外力と移動体52の移動位置との相対データを推定するデータ推定部22、推定された相対データを基に推定外力を算出して各指令移動位置における移動誤差量を推定する誤差推定部23、及び推定された移動誤差量を基に補正量を算出して学習制御の初期値として設定する補正量設定部24から構成される初期値設定部21とを備える。
(もっと読む)
情報処理装置、位置制御方法、プログラムおよび記録媒体
【課題】 ポインティング・デバイスを用いて、顕微鏡システムにおけるステージなどの操作対象を位置制御する情報処理装置、位置制御方法、プログラムおよび記録媒体を提供すること。
【解決手段】 本発明の情報処理装置110は、ポインティング・デバイス114により指し示される操作画面上の座標値を取得する手段172と、この座標値から操作対象の位置の目標値を算出する手段174と、操作対象の位置の目標値と現在値との差分を算出する手段176と、座標値の取得時間間隔内に操作対象を差分だけ移動させるために必要な速度から、予め設定された平滑化係数に応じて減速した値として、操作対象を駆動する同期モータのパルススピードの目標値を算出する手段180と、差分が有り、かつ、順方向の駆動信号が出力されている場合に、算出されたパルススピードの目標値を設定し、このパルススピードの目標値に向けた加減速制御を指令する手段184とを含む。
(もっと読む)
サーボ制御装置
【課題】送り機構のボールスクリューが経年変化や温度変化で伸縮してボールスクリューの軸方向に沿う剛性が変化しても、このような剛性変化を補償して、テーブルの位置を正確にサーボ制御する
【解決手段】制御部100は、サーボモータ40をフィードバック制御して、負荷であるテーブル02をサーボ制御する。逆特性モデル300は、機械系の動的誤差を補償する速度補償信号V300を求めて、フィードフォワード補償制御をする。剛性変化補償部400は、ボールスクリュー30のネジ部31の軸方向に沿う剛性が変化したら、この剛性変化に応じて、逆特性モデル300の補償制御用伝達関数に含まれているネジ部の軸方向に沿う剛性値を変化させる。
(もっと読む)
平面モータ
【課題】スライダをプラテンから降ろして吊り上げることなくスライダのエアベアリング面を直接メンテナンスできる平面モータを提供する。
【解決手段】
エアベアリング19によりスライダ12をプラテン11の上面に浮上させ、2次元方向に移動させる平面モータにおいて、
プラテン11に上面高さを揃えて外付けされ、スライダ12の底面よりも小さな開口部51aと、この開口部51aを密封状態にふさぐ蓋部511と、この蓋部511を開閉する駆動機構512と、蓋部511を開いた状態において開口部51aからスライダ12のエアベアリング面12aを清掃するメンテナンス部18とを有する脱着式プラテン51を備えたことを特徴とする平面モータ。
(もっと読む)
ステージ装置及びステージ位置決め制御方法
【課題】ステージの位置決め後にモータのサーボ制御を停止してもステージの位置ずれを発生させないように、ブレーキ機構を最適に制御できるステージ装置及び同装置のステージ位置決め制御方法を提供する。
【解決手段】ピエゾ素子632で駆動されるブレーキ機構を備える。それぞれの位置決めすべき点に初めて位置決めする際、ステージを移動、停止した後に、ブレーキ制御最適化手段640によりリニアモータ622に対する推力指令を0に近づけるようにブレーキ駆動指令を調整し、リニアモータ622のサーボ制御をオフにしてもステージの位置ずれを発生させないような最適なブレーキ駆動指令を求め、これをブレーキ制御パラメータ記憶手段641に記憶する。さらに、同じそれぞれの位置決めすべき点に再度ステージを位置決めする際、ステージを移動、停止した後に、記憶した最適なブレーキ駆動指令をブレーキ機構に対して出力し、高精度な位置決めを行う。
(もっと読む)
位置検出システム及びケーブルユニット
【課題】単純なシステムで位置制御を可能とし、設備費用を低減できる位置検出システム及びケーブルユニットを提供する。
【解決手段】位置検出システムは、所定の移動経路10に沿って移動可能な移動機20と、位置情報を記憶するとともに前記移動経路10に沿って並列配置された複数のICタグ34と、移動機20側に設けられ、対応する読取範囲A1に配された前記ICタグ34の位置情報を読み取る第1アンテナ26と、を備える。
(もっと読む)
サーボ制御装置
【課題】位置制御の精度向上を実現すること。
【解決手段】モータの回転運動を直線運動に変換するねじ送り部と、ねじ送り部によって直線移動させられる被駆動部と、ねじ送り部及び被駆動部が支持される支持体とを備える数値制御機器に適用され、被駆動部の位置を位置指令に一致させるようにモータを制御するサーボ制御装置であって、支持体の振動反力による被駆動部の振動を補償する支持体反力補償部311を備え、支持体反力補償部311が備える伝達関数には、被駆動部の剛性項が含まれているサーボ制御装置を提供する。
(もっと読む)
1 - 20 / 61
[ Back to top ]