
Fターム[5H501AA22]の内容
Fターム[5H501AA22]に分類される特許
1 - 20 / 313
モータ制御装置及びモータ制御方法
モータ制御装置
回転駆動装置及びロボット装置
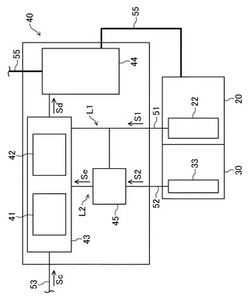
【課題】高度な制御が実現でき、産業ロボット等に好適な回転駆動装置を提供する。
【解決手段】トラクション方式の減速機30や指令信号に基づいてモータ20の出力を制御する駆動制御機構40を備えた回転駆動装置10である。減速機30の入力側に第1ロータリエンコーダ22、減速機30の出力側に第2ロータリエンコーダ33を有している。駆動制御機構40は、指令信号Scと第1検出信号S1とに基づいてモータ20の出力を制御する制御信号Sdを生成する出力制御部43、制御信号Sdに従うドライバ44、第1検出信号S1と第2検出信号S2とを比較して、減速機30の入力と出力との間の誤差を演算する誤差演算部45を有している。出力制御部43が誤差演算部45の演算結果に基づいて制御信号Scを補正する。
(もっと読む)
モーター制御装置、ロボットハンド、ロボット及びモーター制御方法

【課題】回転軸の速度制御をしながらトルク限定値を超えないトルクで回転させるモーターの制御装置を提供する。
【解決手段】モーター5の回転軸5aの回転状況を検出する回転検出器19が出力する角度データ信号24及び回転速度信号29を用いてモーター5を制御する。回転軸5aの速度指令27と回転速度信号29とを用いて回転軸5aの回転速度と速度指令27との差に対応するトルク指令信号37を出力する速度制御部31と、回転軸5aに加えるトルクの最大値を示すトルク限定値を設定する限定値設定部46と、トルク指令信号37により駆動される回転軸5aのトルクをトルク限定値以下に制限するトルク限定制御部38と、を備える。
(もっと読む)
異常検出装置
【課題】 サーボモータによって駆動される被駆動部の異常部位を特定可能な異常検出装置を提供する。
【解決手段】 本発明の異常検出装置は、サーボモータの位置情報が位置検出器から入力される入力部と、位置情報を周波数変換する周波数変換部と、周波数変換された所定周波数における振幅と被駆動部の異常を判定する閾値とを比較する比較判定部と、を有し、比較判定部は、所定周波数における振幅が被駆動部の異常を判定する閾値以上となる周波数から被駆動部の異常部位を特定する。
(もっと読む)
位置検出装置、回転式アクチュエータ、および、それを用いたシフトバイワイヤシステム
【課題】パルス信号の出力に関する異常が生じても可動部材の位置の検出を継続可能な位置検出装置を提供する。
【解決手段】エンコーダ40は、モータ軸21が回転するのに応じ、所定の位相差を有する3相のパルス信号を出力する。ECU3は、カウント値を保持し、エンコーダ40が出力する3相のパルス信号のすべてが正常のとき出現する各パルス信号の組み合わせパターンである正常時パターン、および、3相のパルス信号のうち1相のパルス信号が異常のときのみ出現する各パルス信号の組み合わせパターンである異常時パターンに基づき、前記カウント値に対し第1所定値「1」、または、第2所定値「2」を加算または減算する。ECU3は、前記カウント値に基づき、モータ軸21の回転位置を検出する。
(もっと読む)
モータ駆動装置
【課題】設定内容とともに設定に必要となる関連情報を同時表示する設定表示装置を用いることで簡便かつ迅速な設定を可能とするモータ駆動装置を提供する。
【解決手段】設定表示装置20によりモータ駆動に関する設定が行われるモータ駆動装置1であって、この設定表示装置20は、ある設定項目の設定内容を変更する際に、設定項目の設定内容を表示し、さらに設定項目に関連する少なくとも1以上の関連項目の関連情報を表示するようにした。
(もっと読む)
主軸駆動用モータの制御装置
【課題】主軸にかかる負荷が大きい場合はモータと主軸との間にスリップが発生し、主軸位置検出結果をモータ速度のフィードバック制御に利用するとモータ速度の制御が不安定になるという問題が生じていた。
【解決手段】本発明の制御装置は、位置指令値に従って速度指令値を出力する位置制御部と、前記速度指令値に従って電流指令値を出力する速度制御部と、モータに流れる電流を検出する電流検出部と、電流に基づいてモータの第1速度を推定する第1速度推定部と、センサにより検出される主軸位置に基づいて算出される主軸速度及び変速比に基づいてモータの第2速度を推定する第2速度推定部と、モータ負荷の値を算出する負荷演算部と、を有し、速度制御部は、モータ負荷の値が所定の値以上の場合は第1速度を用い、所定の値未満の場合は第2速度を用いて電流指令値を算出する、ことを特徴とする。
(もっと読む)
モータシステムおよびモータ制御装置
【課題】複数機種のモータが接続可能なモータ制御装置を有するモータシステムにおいて、モータ側の記憶容量を低減させるとともに、電源投入時等の初期動作の時間を短くすることが可能なモータシステムを提供する。
【解決手段】モータシステム1において、複数機種のモータ2が接続可能なモータ制御装置3は、モータ2の機種ごとに設定される複数の制御パラメータ群14a〜14eが記憶される記憶部11と、モータ2を駆動制御するモータ制御部10を備え、モータ2は、モータ2の機種コードが記憶されるモータ側記憶部7を備えている。モータ制御装置3は、モータ側記憶部7に記憶されている機種コードを読み出して、読み出された機種コードに対応する制御パラメータ群14a〜14eを記憶部11の中から選択するとともに、選択された制御パラメータ群14a〜14eの各制御パラメータをモータ制御部10に設定してモータ2を制御する。
(もっと読む)
負荷制御システムおよび負荷駆動システム
【課題】負荷駆動のためのアクチュエータ等の負荷駆動要素を複数制御する場合、その制御システム構築が容易となる負荷制御システムを提供する。
【解決手段】負荷駆動のための複数の負荷駆動要素のそれぞれを駆動制御するために、該複数の負荷駆動要素に対応して設けられる複数のドライバを含む負荷制御システムであって、複数のドライバのそれぞれは、自ドライバに直接関連付けられた負荷駆動要素を制御する制御部を有する。そして、複数のドライバのそれぞれは、負荷制御システムにおいて、自ドライバの制御部から該自ドライバを除く他のドライバの全部または一部の対象ドライバの制御部に対して、該対象ドライバに直接関連付けられた負荷駆動要素の駆動制御を行うための指令信号の送信が可能となる相互制御通信状態が形成されるように、互いに電気的に接続される。
(もっと読む)
射出成形機
【課題】整流部に流れる循環電流を抑制できる、射出成形機を提供すること。
【解決手段】モータと、前記モータを駆動する駆動回路と、前記駆動回路に電力を供給する整流器102と、前記駆動回路と整流器102との間に設けられたコンデンサ301と、前記駆動回路と整流器102との間の直流電力を交流電力に変換するブリッジ回路104と、ブリッジ回路104の交流部側に接続された高調波成分抑制部63と、整流器102に並列接続された回生経路82とを有し、ブリッジ回路104と高調波成分抑制部63とを回生経路82に備える、射出成形機あって、ブリッジ回路104を構成する複数のスイッチング素子は、コンデンサ301の電圧が所定値以上のとき、前記モータの電力を回生するようにオン/オフし、コンデンサ301の電圧が前記所定値未満のとき、全てオフする、ことを特徴とする、射出成形機。
(もっと読む)
モータ駆動制御装置
【課題】共有メモリに調整用データとモニタデータとをこの順に排他的に保存する場合にユーザに特別な操作を要求することなく、自動的に共有メモリへの保存データの切り替えが行えるモータ駆動制御装置を得ること。
【解決手段】データ入出力装置10を用いた制御機能の調整設定時において、スイッチ7に調整用データ取得部5aの出力端と共有メモリ8のデータ入力端とを接続させ、その後、データ入出力装置10が出力する制御機能の調整設定の完了通知に応答してスイッチ7にモニタデータ取得部6の出力端と共有メモリ8のデータ入力端とを接続させるスイッチ切替信号17を発生する手段を備えた。
(もっと読む)
モーター駆動方法、モーター駆動装置およびロボット
【課題】ロボットアームなどの被駆動部を高速で動作させることができるモーターの駆動方法、駆動装置およびロボットを提供する。
【解決手段】モーターの駆動トルク計測データと回転数計測データと、を取得する駆動データ取得工程と、前記駆動トルク計測データと前記回転数計測データと、を前記モーターの回転数/トルク特性テーブルと比較する比較工程と、前記比較工程の比較結果において、前記駆動トルク計測データと前記回転数計測データとが、前記回転数/トルク特性テーブルの駆動可能領域境界にある場合、前記モーターの駆動電圧を昇圧させる昇電圧工程と、を備えるモーター駆動方法。
(もっと読む)
サーボモータ用ドライブユニット
【課題】ドライブユニット本体及び外部接続ユニットの種類を問わず、これらを任意に選択して相互に組み合わせて使用することを可能にするインタフェースを有する低コストで設計の自由度に優れたサーボモータ用ドライブユニットを提供する。
【解決手段】ドライブユニット本体2と外部接続ユニット4とを相互に組み合わせて、サーボモータを制御することを可能にするインタフェース6を備え、インタフェースは、ドライブユニット本体及び外部接続ユニットの種類に応じて構築されるサーボモータ制御用構成品2a及び外部接続用構成品4aの双方に、着脱自在に接続させる構造に構成可能であり、インタフェースを、サーボモータ制御用構成品及び外部接続用構成品の双方に接続させることで、ドライブユニット本体と外部接続ユニットとを相互に組み合わせて、サーボモータを制御可能にする。
(もっと読む)
アクチュエータ、モータ制御システム、及びモータ制御方法
【課題】信頼性又はロバスト性を向上したアクチュエータ、モータ制御システム、及びモータ制御方法を提供する。
【解決手段】アクチュエータは、モータと、モータの回転角を検出する回転角センサと、モータの回転を所定の変位に変換する被駆動機構と、被駆動機構の変位を検出する位置センサと、モータを制御する制御装置と、を含み、制御装置は、正常時における回転角センサの回転角信号及び位置センサの変位信号の相対関係情報を記憶しており、変位信号を取得し、相対関係情報に基づいて回転角を推定した推定回転角信号を演算し、推定回転角信号に基づいてモータを制御する。
(もっと読む)
主軸駆動用モータの制御装置
【課題】主軸にかかる負荷が大きい場合はモータと主軸との間にスリップが発生し、主軸位置検出結果をモータ速度のフィードバック制御に利用するとモータ速度の制御が不安定になるという問題が生じていた。
【解決手段】本発明の制御装置は、位置指令値に従って電流指令値を出力する速度制御部と、モータに流れる電流を検出する電流検出部と、電流に基づいてモータの第1速度を推定する第1速度推定部と、主軸の近傍に設けられたセンサにより検出される主軸位置に基づいて算出される主軸速度及び変速比に基づいてモータの第2速度を推定する第2速度推定部と、モータ負荷の値を算出する負荷演算部と、を有し、速度制御部は、モータ負荷の値が所定の値以上の場合は第1速度を用いて電流指令値を算出し、モータ負荷の値が所定の値未満の場合は第2速度を用いて電流指令値を算出する、ことを特徴とする。
(もっと読む)
自動機械の制御装置
【課題】稼働率の低下を抑えること。
【解決手段】サーボ制御部17が、サーボモータ21の回転を制御し、異常検出部18が、サーボ制御部17への電源供給遮断状態(すなわち、サーボ制御部17によるサーボモータ21の制御が非制御の状態)において、エンコーダ23によって検出されたサーボモータ21の回転位置(エンコーダ値)を取得するとともに、取得したエンコーダ値に基づいてブレーキ22の異常を検出するように制御装置1を構成する。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】一定期間、予め設定されたトルクを出力させて、モータを目標停止位置に停止させることができるモータ制御装置及びモータ制御方法を提供する。
【解決手段】モータ制御装置10は、トルク指令に基づいて、モータMを駆動する電流を出力する電力変換部12と、モータMの速度指令とモータMのモータ速度との偏差に基づいて、トルク指令を生成する速度制御部14と、モータMの速度制御中に、モータMのモータ位置を検出する位置検出器PGの1回転当たりの基準位置を最初に検出した後、モータMを位置制御する定位置停止制御部20とを備える。
(もっと読む)
モータ制御装置
【課題】
エンコーダの分解能が高くなり、出力されたデジタル信号の周波数が高くなったときにも誤動作を起こさないモータ制御装置を提供することを目的とする。
【解決手段】
複数段のDフリップフロップから構成されており、各Dフリップフロップの出力のHレベルの数に応じて出力を決定しノイズを除去することができるデジタルフィルタを備える。これによりエンコーダの分解能が高くなり、出力されたデジタル信号の周波数が高くなった場合にもノイズが効果的に除去可能であり、誤動作が起こりにくいモータ制御装置を提供することができる。
(もっと読む)
モータ制御装置
【課題】動作中に振動特性が変化する制御対象に対する振動抑制制御の精度を向上できるモータ制御装置を得ること。
【解決手段】モータ1a及び振動可能要素1bを有する制御対象1の動作を制御して、制御対象の動作を動作目標値に追従するようにモデルトルクτaを生成するフィードフォワード制御部111と、モデルトルクに応じてトルク指令τMを発生させる発生部とを備え、フィードフォワード制御部は、制御対象の振動関連情報に応じて、振動特性を表す振動パラメータθを生成する生成部と、振動パラメータに応じて、動特性を模擬した数式モデル121を変更し、モデルトルクから変更された数式モデルにより、制御対象の動作状態を含むモデル変数を演算する第1の演算部と、モデル変数が一定の追従特性で動作目標値に追従するように、振動パラメータに応じて特性を変化させた演算によりモデルトルクを演算する第2の演算部とを有する。
(もっと読む)
1 - 20 / 313
[ Back to top ]