
Fターム[5H501GG03]の内容
Fターム[5H501GG03]の下位に属するFターム
負荷の検出値をフィードバックするもの (45)
Fターム[5H501GG03]に分類される特許
201 - 220 / 670
保護機能を備えた電動機制御装置
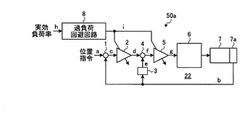
【課題】簡易な構成でアラーム停止を回避できる保護機能を備えたモータ制御装置を得ること。
【解決手段】各種の機械を駆動するモータに供給する電流の制御を行うトルク制御部を含むマイナーループを有するモータ制御装置において、実効負荷率もしくは当該モータ制御装置と前記モータと前記機械との少なくともいずれか一つの温度に関する物理量を観測或いは推測し、過負荷になる可能性が高いと判断した場合に、前記実効負荷率を下げる方向に、前記トルク制御部の入力側経路に存在する制御系の制御応答性を変更する過負荷回避動作を行う構成を備えた。
(もっと読む)
電動アクチュエータの制御装置

【課題】作動部材の作動状態を所望の態様で精度良く制御することのできる電動アクチュエータの制御装置を提供する。
【解決手段】この装置は、モータ18の回転速度のフィードバック制御を通じて、同モータ18の回転軸に連結されたバルブタイミング変更機構14の作動状態を変化させることによって、内燃機関1のバルブタイミングを可変とするように構成されている。電子制御ユニット22は、モータ18の過熱時に同モータ18への供給電力を制限するとの発熱ガードを発動させる。発熱ガードの発動頻度が既定の判定値(ゲイン増大判定値)以上であるときに、同発動頻度がゲイン増大判定値未満であるときと比較して、上記フィードバック制御におけるフィードバックゲインを増大させる。
(もっと読む)
エンコーダー及び電気機械装置
【課題】簡単な構成で高分解能なエンコーダーを実現する。
【解決手段】エンコーダー300であって、回転円盤310と、前記回転円盤上において前記回転円盤の円周に沿って等間隔に設けられたm個(mは2以上の整数)のスリット又は反射板で構成される光学要素列311と、前記光学要素列に光を照射する発光部320と、前記光学要素列の個々の光学要素を透過する、または反射する光を受光して矩形状の受光信号を出力する受光部371〜374と、を備え、前記発光部と前記受光部は、n組配置されており、個々の受光信号の1周期の位相差を2πと定義したとき、n個の受光部で生成されるn個の受光信号の位相がπ/nずつ順次ずれるように配置されている。
(もっと読む)
モータ制御装置及び画像形成システム
【課題】適切に外乱抑制可能なモータ制御装置を提供する。
【解決手段】プリンタ装置は、外乱抑制器314にて、速度制御器313の制御入力u0を補正し、補正後の制御入力ucを、CR(キャリッジ)モータの駆動回路に入力する。外乱抑制器は、制御出力y(CRモータの回転角速度)を計測する速度検出器から入力される制御出力yの計測信号を、制御対象の伝達関数G(s)=K/(J・s)の逆モデル1/G(s)と、カットオフ周波数ωyのローパスフィルタF(s,ωy)=ωy/(s+ωy)との合成伝達関数E(s,ωy)=F/Gに入力し、制御入力ucを、カットオフ周波数ωu(但しωu>ωy)のローパスフィルタF(s,ωu)に入力する。そして、制御入力u0を、フィルタ処理後の制御入力F(s,ωu)・uc及び合成伝達関数Eの出力E(s,ωy)・yにより補正し、制御入力u0を、uc=u0+F(s,ωu)・uc−E(s,ωy)・yに補正する。
(もっと読む)
モータ制御装置、状態検出方法、及び機器制御装置
【課題】コストがかからずに、エアコンECU(制御装置)側で、より詳細に異常の状態を検知する。
【解決手段】制御手段が、保護回路55で正常状態が検出された場合に、第1の電圧及び第2の電圧の一方が指令信号線32に印加され、保護回路55で異常状態が検出された場合に、第1の電圧及び第2の電圧の他方が指令信号線32に印加されるように制御する。コストがかからずに、制御装置側で、より詳細に異常の状態を検出することができる。
(もっと読む)
ハイブリッド型建設機械
【課題】連続運転を実現することにより、作業効率を向上可能なハイブリッド型建設機械を提供する。
【解決手段】ショベルでは、コントローラ30は、インバータを冷却するための冷却水の温度が出力抑制温度以上になった場合には、旋回用電動機等の交流電動機に供給される電流の上限値を小さくする制御を行う。これにより、インバータにおける温度上昇が抑制される。出力抑制温度は、インバータが交流電動機への電流の供給を停止する機構の動作を開始させる温度である運転停止温度より低いので、交流電動機が停止される前に、インバータが交流電動機に供給する電流の上限値を小さくする制御がコントローラにより実施される。これにより、交流電動機の温度異常による停止が防止され、ショベルの連続運転が実現される。
(もっと読む)
車両
【課題】回路構成が複雑でなく、位相差信号に対する応答性が良好で、かつ、熱により信号変動が小さいモーター制御回路を提供する。
【解決手段】モーターの回転制御回路において、前記モーターのPWM制御回路と、前記モーターの回転速度センサと、基準信号発生回路10と、位相比較回路と、前記モーターの検出回転速度信号を分周する分周器とを備え、この分周器からの信号と前記基準信号に基づく信号との位相差を位相比較器で求め、この位相差信号を前記PWM制御回路に供給するように構成した。
(もっと読む)
ブラシレスDCモータの制御方法およびブラシレスDCモータの制御装置
【課題】誘起電圧を用いたロータの位置検出ができない場合にリップルが発生しても、ブラシレスDCモータの回転変動等の発生を抑制することができるブラシレスDCモータの制御方法およびブラシレスDCモータの制御装置を提供する。
【解決手段】推定位相方式による制御を行っている場合に、直流電圧の所定時間における平均電圧を算出し、平均電圧と現在の直流電圧との差に対応して、ブラシレスDCモータの通電を切り替える。直流電圧が平均電圧より高い場合には、ブラシレスDCモータの磁極に対する通電時間を目標回転数に対応する通電時間より短くし、直流電圧が平均電圧より低い場合には、ブラシレスDCモータの磁極に対する通電時間を目標回転数に対応する通電時間より長くするようにしてもよい。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】 モータの角速度を目標角速度まで線形的に立ち上げることができるようにする。
【解決手段】 DCモータの起動時に、DCモータへ指示する制御値を、目標角速度より小さい角速度に対応する第1の制御値NSTAから目標角速度より大きい角速度に対応する第2の制御値NENDまで一定比率で増加させ、DCモータが目標角速度になった(t2)ことに応じて、DCモータを目標角速度に維持するための制御値に切り替える。
(もっと読む)
電動機制御装置
【課題】常に安定した制御状態を確保しながら、電動機やその負荷の動き動作の制御を行う電動機制御装置を提供する。
【解決手段】速度検出信号Vdと速度指令信号Vrとに基づき速度フィードバック制御する速度制御系を有した電動機制御装置10であって、速度制御系内の制御信号に対してノッチ周波数の信号成分を減衰させるノッチフィルタ15aと、速度検出信号Vdから所定周波数の信号成分を抽出し、抽出信号xとして出力する振動抽出フィルタ17と、速度指令信号Vrに応じて抽出信号xから不感閾値以下となる振幅の信号成分を除去し、抽出振動信号xeとして出力する不感帯処理部20と、抽出振動信号xeに基づきノッチ周波数を変更するように、ノッチフィルタ15aを制御するノッチ制御部30とを備える。
(もっと読む)
スイッチトリラクタンスモータ制御方法およびその装置
【課題】回転子の回転位置の推定精度を高く維持する。
【解決手段】回転位置推定相を決定する推定相決定部61と、決定された回転位置推定相における巻線電流iを選択する推定相電流選択部62と、選択された巻線電流i、インバータにおける直流電圧VdcおよびPWMパターンを入力として、決定された回転位置推定相における磁束鎖交数λを算出する推定相磁束鎖交数算出部63と、選択された巻線電流iおよび算出された磁束鎖交数λを入力として回転位置推定演算を行って第1推定回転位置θMを出力する位置推定演算部64と、過去の推定回転位置と過去の回転速度に基づいてバックアップ回転位置としての第2推定回転位置θpを算出するバックアップ位置算出部65と、第1推定回転位置θMまたは第2推定回転位置θpを選択して最終的に得られた推定回転位置θeとして出力する推定回転位置選択部66とを有している。
(もっと読む)
スイッチトリラクタンスモータ用制御装置
【課題】ロータが予め定められた指定方向と反対の逆方向に回転しているときでも、U相、V相またはW相の電気巻線に流れる電流の電流値を目標電流値に一致または近づけることができるスイッチトリラクタンスモータ用制御装置を提供する。
【解決手段】スイッチ制御装置20は、ロータ203が指定方向Eに回転していると判断される場合、または、指定方向Eと反対の逆方向Rに予め定められた第1の回転数未満で回転していると判断される場合に、ソフトチョッピングモードで動作し、ロータ203の回転が指定方向Eと反対の逆方向Rに予め定められた第1の回転数以上で回転していると判断される場合に、ハードチョッピングモードで動作する。
(もっと読む)
燃焼装置
【課題】 ファン回転数−電流特性が変動する場合に、ファン回転数−電流特性に個体差によるばらつきがあってもそのファンの特性に応じた正確な風量補正ができる燃焼装置を提供する。
【解決手段】 給湯器1では、ファン制御手段32によりファンモータのファン電流を制御するとき、まず、演算処理部33によって算出した第1ファン補正係数を記憶部34に記憶する。次いで、演算処理部33によって第1補正係数及び火炎サーミスタ8aの出力に基づく第2補正係数により算出したファン補正係数を記憶部34に記憶する。その後、補正部35により、ファン補正係数に基づくファンの風量補正が行われる。
(もっと読む)
繊維機械
【課題】回転速度にかかわらず効率良く正確に電気モータを制御できる繊維機械を提供する。
【解決手段】自動ワインダは、モータ51と、位置センサ56と、電流センサ70と、パルス検出部55と、モータ制御部52と、を備える。位置センサ56は、モータ51のロータ磁極位置を検出する。電流センサ70は、モータ51の電流を検出する。パルス検出部55は、モータ51の回転に応じたパルスを検出する。モータ制御部52は、モータ51の回転を制御する。また、モータ制御部52は、第1制御部71と、第2制御部72と、を備える。第1制御部71は、位置センサ56の検出結果及びパルス検出部55の検出結果に基づいてモータ51の回転を制御する。第2制御部72は、電流センサ70の検出結果に基づいてモータ51の回転を制御する。
(もっと読む)
モータ制御装置
【課題】エンコーダの電源電圧をフィードバックする専用線や、エンコーダに供給されている電圧を測定するための電源電圧レベル検出回路を追加することなく所望の電圧をエンコーダに供給することができるようにする。
【解決手段】シリアル伝送路のデータを監視しながらエンコーダに供給する電源電圧を段階的に下げていき、エンコーダからの応答がなくなった段階の先回の電源電圧がエンコーダの所望する端子電圧であると判断し、エンコーダ電源供給回路の出力電圧を調整する電圧調整処理回路を備える。
(もっと読む)
複数の巻線を備えたモータを駆動するモータ駆動システム
【課題】複数のインバータで駆動可能なモータ駆動システムを単純にする。
【解決手段】モータ駆動システム(10)は、位置指令を用いてPWM指令を出力する複数の軸制御部(31a〜31n)と、複数の軸制御部の各PWM指令に基づいて各巻線に電流を流すと共に、各巻線に接続された複数の電流供給部(20a〜20n)と、モータのロータ位置の信号を出力するモータ位置検出器(12)と、出力された信号を複数の電流供給部のうちの一つの電流供給部に供給する第一信号供給部(41)と、第一信号供給部を通じて供給された信号を一つの電流供給部に対応する軸制御部に供給する第二信号供給部(42)とを具備し、対応する軸制御部は、一つの電流供給部から第二信号供給部を通じて対応する軸制御部に供給された信号と位置指令とに基づいてPWM指令を出力し、残りの軸制御部は、対応する軸制御部から残りの制御軸部に供給された信号と位置指令とに基づいてPWM指令を出力する。
(もっと読む)
位置決め装置
【課題】ユーザに繁雑な作業を強いることなく高い位置決め精度を実現することができ、モータの加速度を変えても位置決め精度の悪化を招くことがない位置決め装置を提供する。
【解決手段】位置決め装置1は、平面モータ10に駆動されてXY面内で移動可能なステージ20と、平面モータ10によるステージ20の駆動を制御するモータ制御装置30とを備えており、モータ制御装置30は、ステージ20が移動している状態における平面モータ10の電流推力特性に合わせた駆動電流C1〜C3を平面モータ10に供給する。
(もっと読む)
冷蔵庫制御装置
【課題】冷蔵庫の突然の故障により、冷蔵庫保管食品を傷めるといったユーザーが受ける不利益を回避することが可能な冷蔵庫制御装置を提供する。
【解決手段】冷蔵庫内の温度状態に応じて冷蔵庫の負荷電流を制御すると共に、冷蔵庫総運転期間を計測する第1マイクロコンピューター1を備え、第1マイクロコンピューター1は、冷蔵庫総運転期間が所定期間以上で、且つ冷蔵庫の負荷電流が予め設定した長期間使用時用の上限規制値以上の場合、冷蔵庫内の温度状態に関わらず負荷電流を上限規制値に制限する負荷制限制御を行う。
(もっと読む)
モータ制御装置とモータ制御方法
【課題】 制御対象の振動を抑制しつつモータを滑らかに動作させることのできるモータ制御装置を提供する。
【解決手段】 移動時間tbと指令次数に関する変数kとaを移動距離に依存する変数とした速度時間関数に基づいて指令払い出し周期毎の指令を演算する指令演算部と,sをラプラス演算子とした時に,ωs,ωc,ζを変数とする2次の伝達関数GF(s)の特性を有するフィルタ演算をする指令フィルタ演算部と,移動時間tbと指令次数に関する変数kに基づいて指令フィルタの変数であるωsを演算で求めるフィルタ定数演算部を備える。
(もっと読む)
モータ制御装置とその位置制御方法
【課題】
位置制御周期が変動しても原点信号と位置関係に悪影響を及ぼすことのないモータ制御装置と位置制御方法を提供する。
【解決手段】
位置制御部は、位置制御周期をモータ位置生成時刻増分値で除し、予め設定された第1位置制御ゲインを乗じて第2位置制御ゲインを生成する第2位置制御ゲイン生成部(21)と、位置指令増分値と第1位置制御ゲインを乗じた値からモータ速度増分値と第2位置制御ゲインを乗じた値を減算し、さらに前回の速度指令を加算して新たな速度指令とする速度指令生成部(22)と、を備えた。
(もっと読む)
201 - 220 / 670
[ Back to top ]